用户您好,请详细描述您所遇到的问题。
1.硬件获取渠道:淘宝
2.当前系统镜像版本:ubuntu20.04
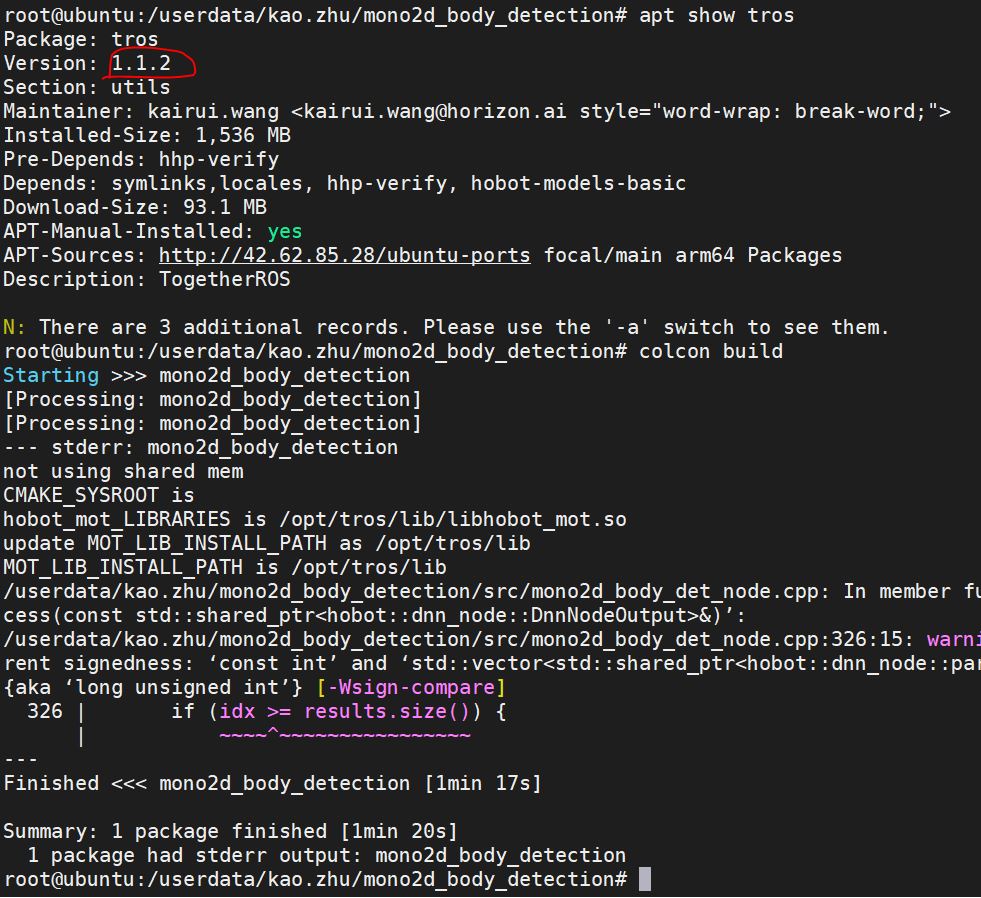
3.当前天工开物版本:x3_ubuntu_1.1.2
4.问题定位:拉取mono2d_body_detection仓库编译失败
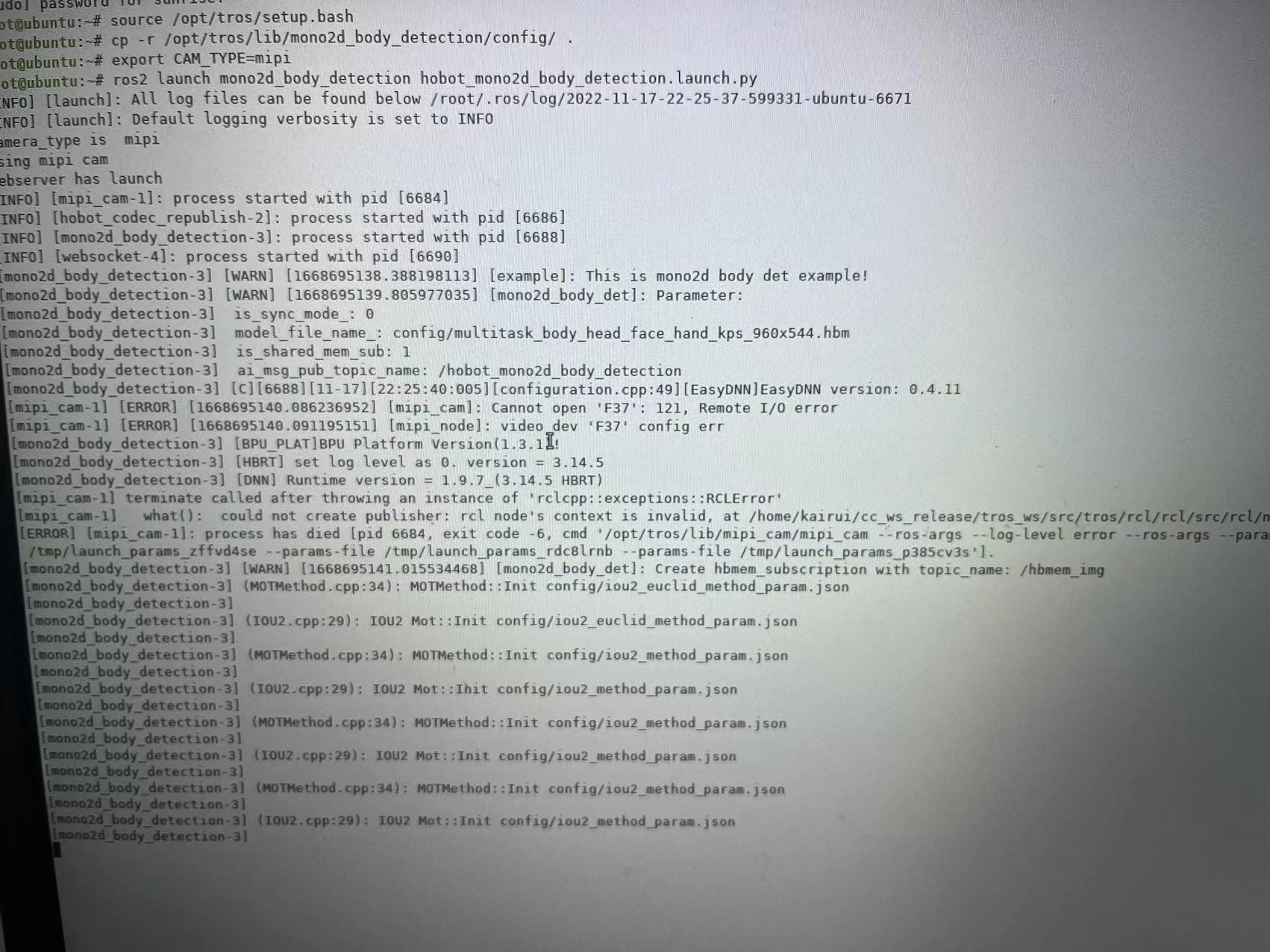
5.开发的demo/案例:mono2d_body_detection
6.需要提供的解决方案:编译成功
拉取mono2d_body_detection编译报错如下
They are being used from the following locations instead:
- /opt/tros
To suppress this warning ignore these packages in the workspace:
--packages-ignore hobot_mot
-– stderr: mono2d_body_detection
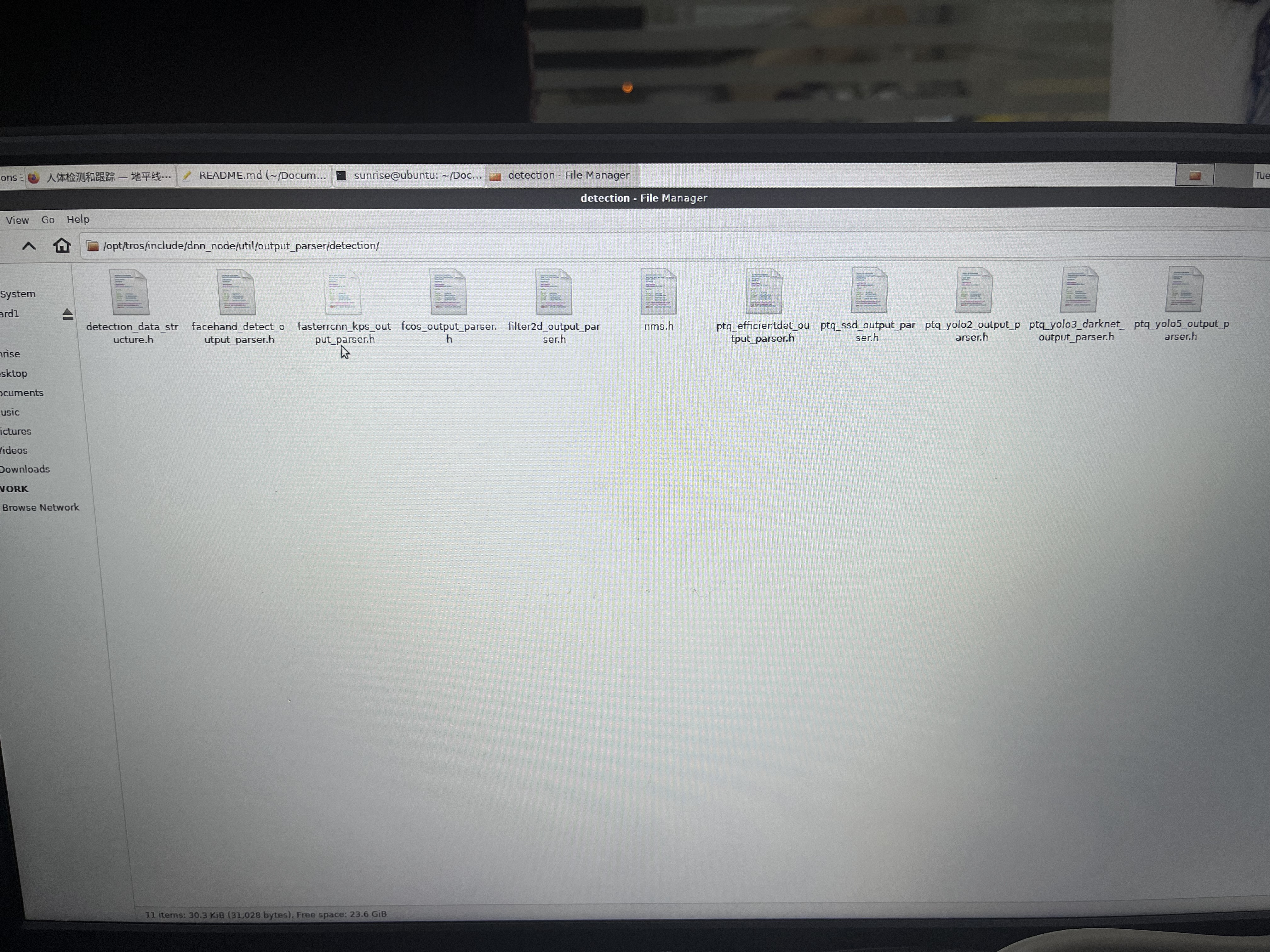
/usr/bin/ld: CMakeFiles/mono2d_body_detection.dir/src/mono2d_body_det_node.cpp.o: in function `Mono2dBodyDetNode::PostProcess(std::shared_ptrhobot::dnn\_node::DnnNodeOutput const&)':
mono2d_body_det_node.cpp:(.text+0x41f8): undefined reference to `hobot::dnn_node::parser_fasterrcnn::Parse(std::shared_ptrhobot::dnn\_node::DnnNodeOutput const&, std::shared_ptrhobot::dnn\_node::parser\_fasterrcnn::FasterRcnnKpsParserPara const&, std::vector<int, std::allocator > const&, int, int, std::vector<std::shared_ptrhobot::dnn\_node::parser\_fasterrcnn::Filter2DResult, std::allocator<std::shared_ptrhobot::dnn\_node::parser\_fasterrcnn::Filter2DResult > >&, std::shared_ptrhobot::dnn\_node::parser\_fasterrcnn::LandmarksResult&)’
collect2: error: ld returned 1 exit status
make[2]: *** [CMakeFiles/mono2d_body_detection.dir/build.make:177: mono2d_body_detection] Error 1
make[1]: *** [CMakeFiles/Makefile2:78: CMakeFiles/mono2d_body_detection.dir/all] Error 2
make: *** [Makefile:141: all] Error 2
-–
Failed <<< mono2d_body_detection [7.52s, exited with code 2]
Summary: 0 packages finished [9.76s]
1 package failed: mono2d_body_detection
1 package had stderr output: mono2d_body_detection