
您好,大佬,我想在X3 ubuntu上编译dnn_node_example 这个功能包但是报了BUG,是不是执行colcon bulid 时所在的目录不对?另外,这个readme有点不太详细,dnn_node_example目录下面的文件也不全,有没有更详细的步骤?或者示例?
您好:
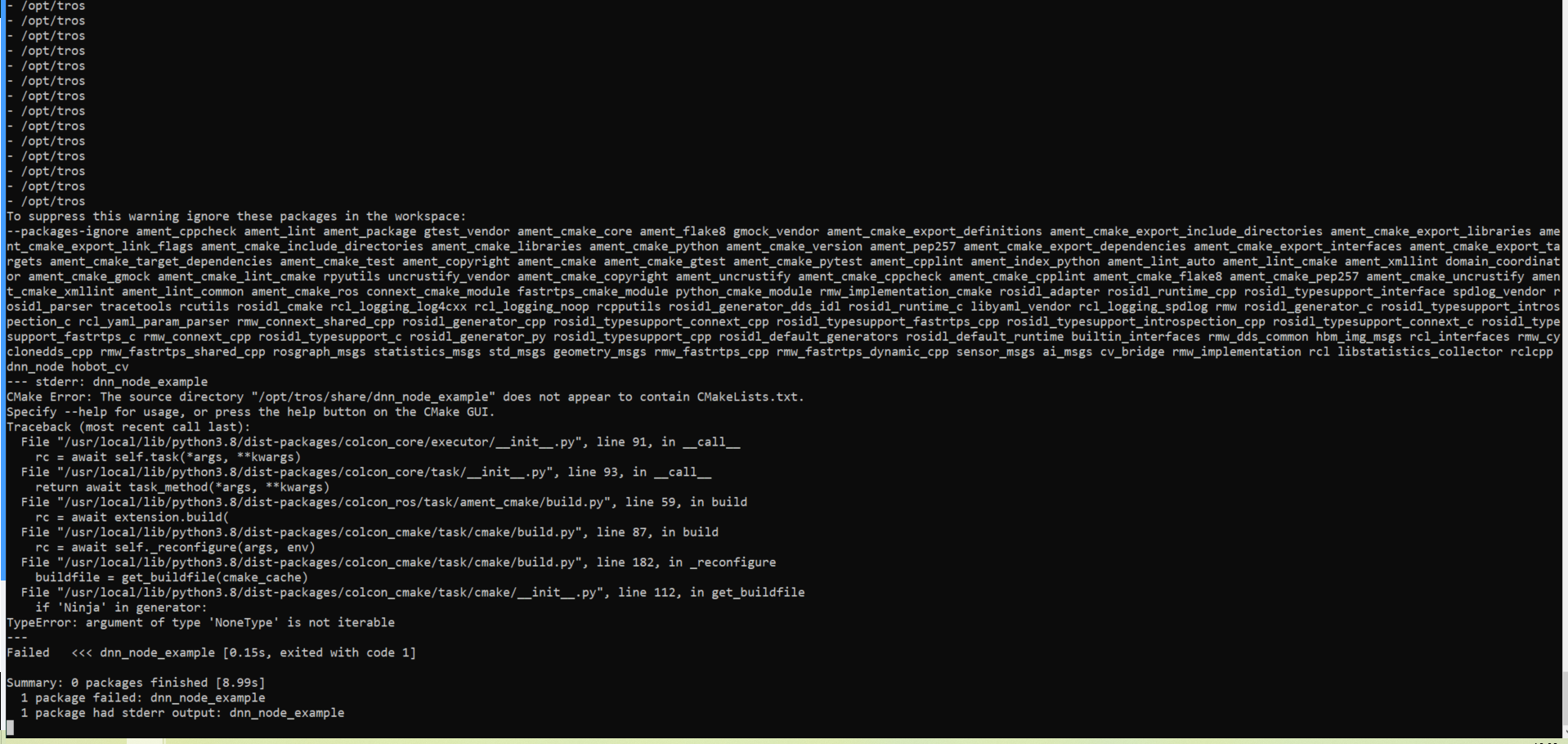
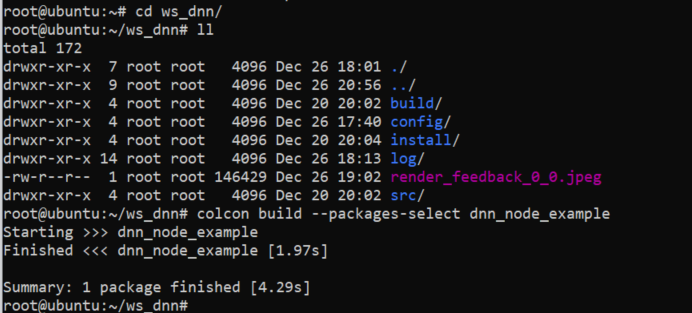
1.是不是在你的工作空间目录下执行的,如果不是,改到工作空间目录;
2.直接在工作空间目录下执行colcon bulid试试
谢谢
您好,
你的编译方式没有看到具体的操作
从错误看提示是缺少变量,是不是又那个参数编译选项 没有选择?
看上还是没有找到对象的定义,你先搜下你的工程中有没有这个对象,有的话,检查下是否有include这个头文件的
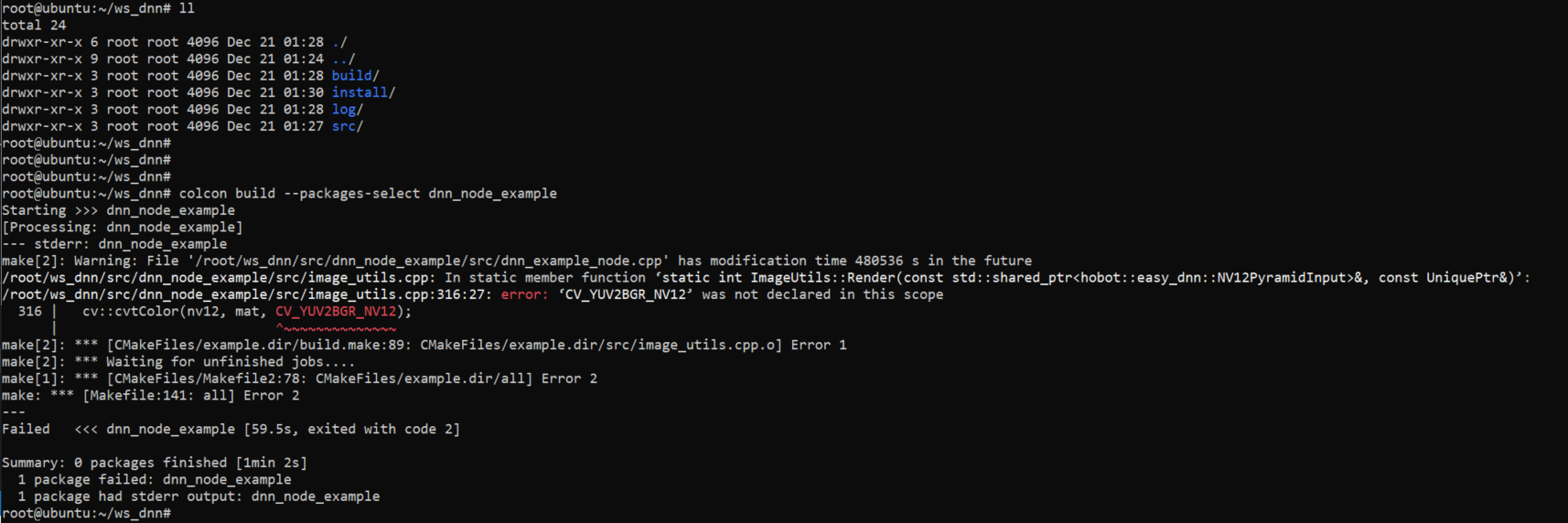
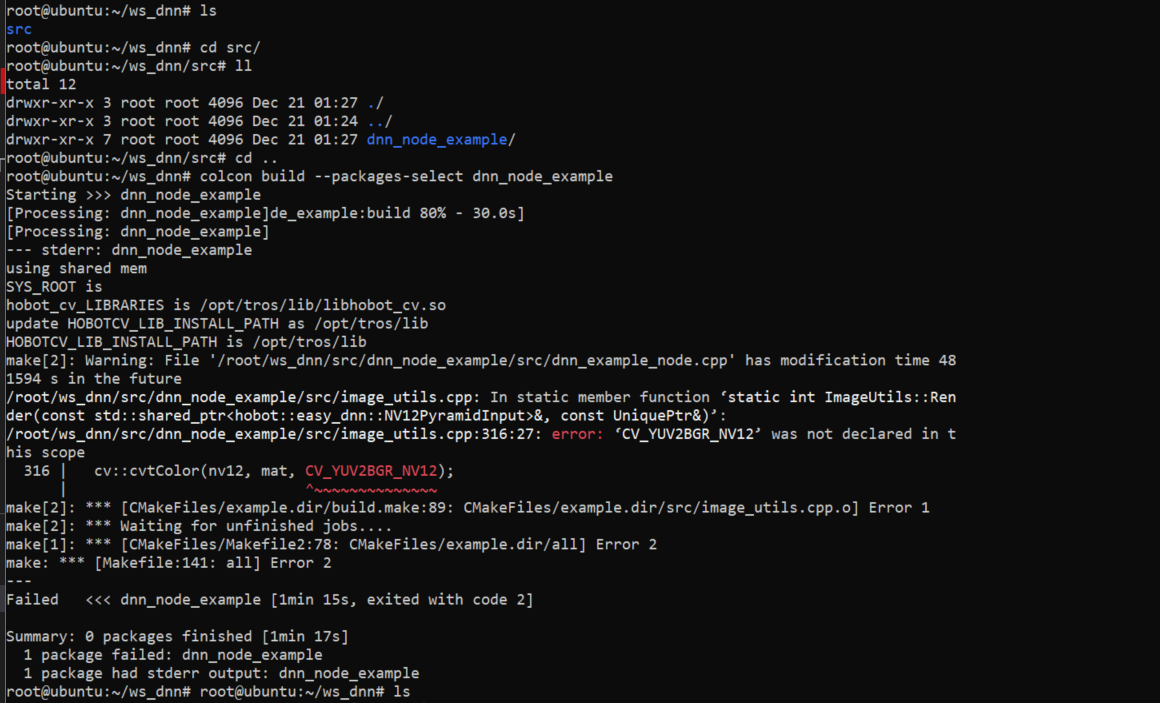
从你这个log看,编译的时候CV_YUV2BGR_NV12定义找不到,opencv环境有安装不?
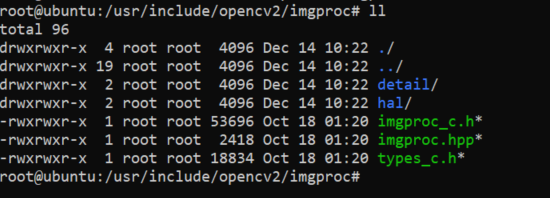
那你搜一下CV_YUV2BGR_NV12的定义有没有,目前编译错误看着是opencv头文件中找不到对应的宏定义
找到原因了,不能兼容高版本的opencv
编译成功了 我怎么用launch脚本启动呢?我还用官网给的脚本启动的话ros2 launch dnn_node_example hobot_dnn_node_example_feedback.launch.py config_file:=config/yolov5workconfig.json image:=config/target.jpg 结果启动的还是编译之前的程序,不是编译后的,需要我重新写一个launch脚本放到工作空间吗?
不需要重新写一个launch文件,你要不先 colcon build;再ros2 run dnn_node_example试试
编译成功了 我怎么用launch脚本启动呢?我还用官网给的脚本启动的话ros2 launch dnn_node_example hobot_dnn_node_example_feedback.launch.py config_file:=config/yolov5workconfig.json image:=config/target.jpg 结果启动的还是编译之前的程序,不是编译后的,需要我重新写一个launch脚本放到工作空间吗?
你好,需要的,要用编译的替换默认的,试过了吗
请问编译过后是把编译后的文件替换掉tros原本文件是吗