哈喽,大家好,我是徐国晟,由于RDK X5是基于Ubuntu22.04 进行版本释放,而ROS1只兼容到了20.04,为了更很好的帮助大家做以前ROS1相关代码方案的快速迁移,提供了使用docker 的ros环境,进而使用ros1的方案,欢迎大家批评指正。-
一、Docker 安装 (需要科学上网)-
-
使用官方的docker安装命令
sudo apt-get update sudo apt-get upgrade curl -fsSL test.docker.com -o get-docker.sh && sh get-docker.sh
-
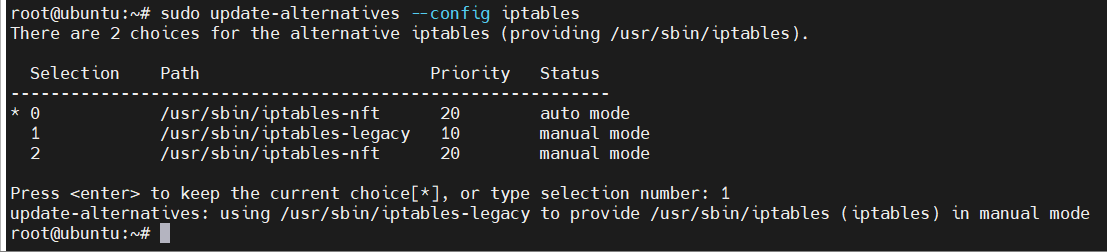
修改网络配置
sudo update-alternatives --config iptables # 选择 iptables-legacy 版本
二、拉取docker 镜像-
-
重启docker服务:
root@ubuntu:~# systemctl restart docker.service
-
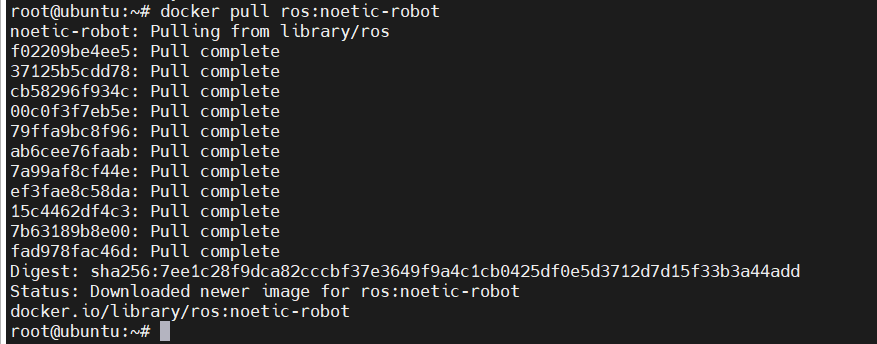
拉取ros 镜像(科学上网)
docker pull ros:noetic-robot
三、在ubuntu 22.04中使用ros1-
-
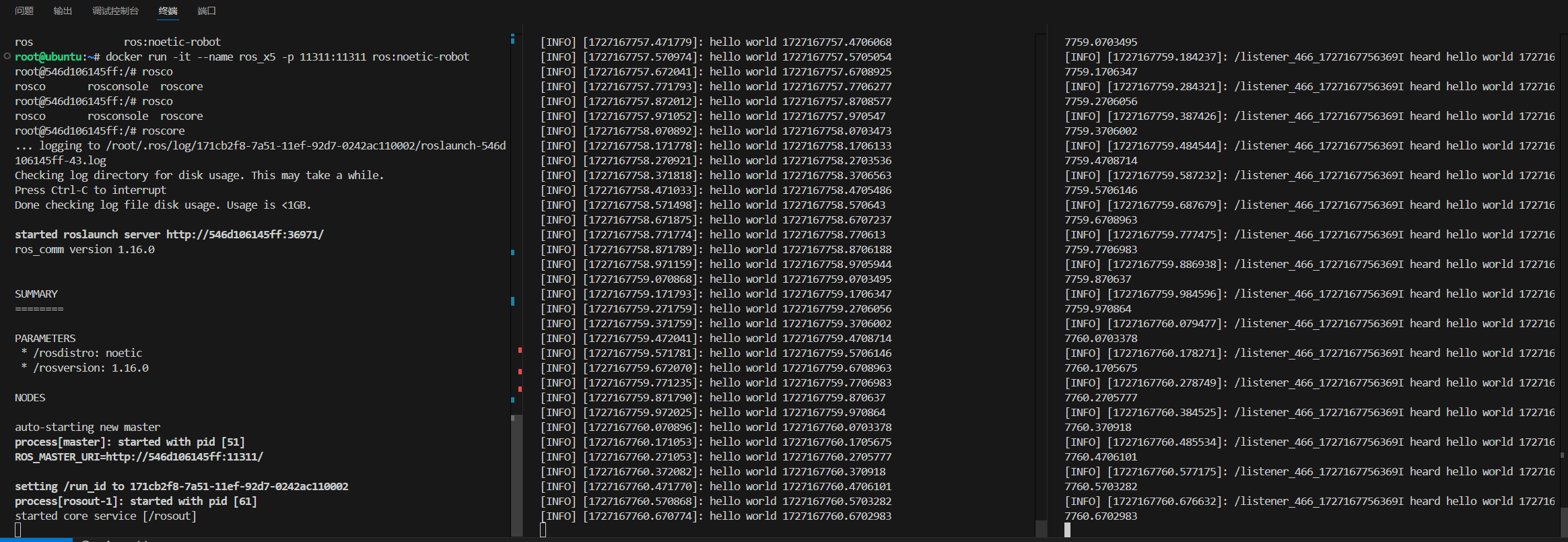
终端一
#推荐启动命令 使用ros 默认端口 docker run -it --name ros_x5 -p 11311:11311 ros:noetic-robot source /opt/ros/noetic/setup.bash roscore #官方启动命令,不推荐 docker run -it ros:noetic-robot
-
安装示例包:
sudo apt update sudo apt install ros-noetic-rospy-tutorials
-
终端二
docker exec -it ros_x5 /bin/bash source /opt/ros/noetic/setup.bash rosrun rospy_tutorials talker.py
-
终端三
docker exec -it ros_x5 /bin/bash source /opt/ros/noetic/setup.bash rosrun rospy_tutorials listener.py#结果展示:
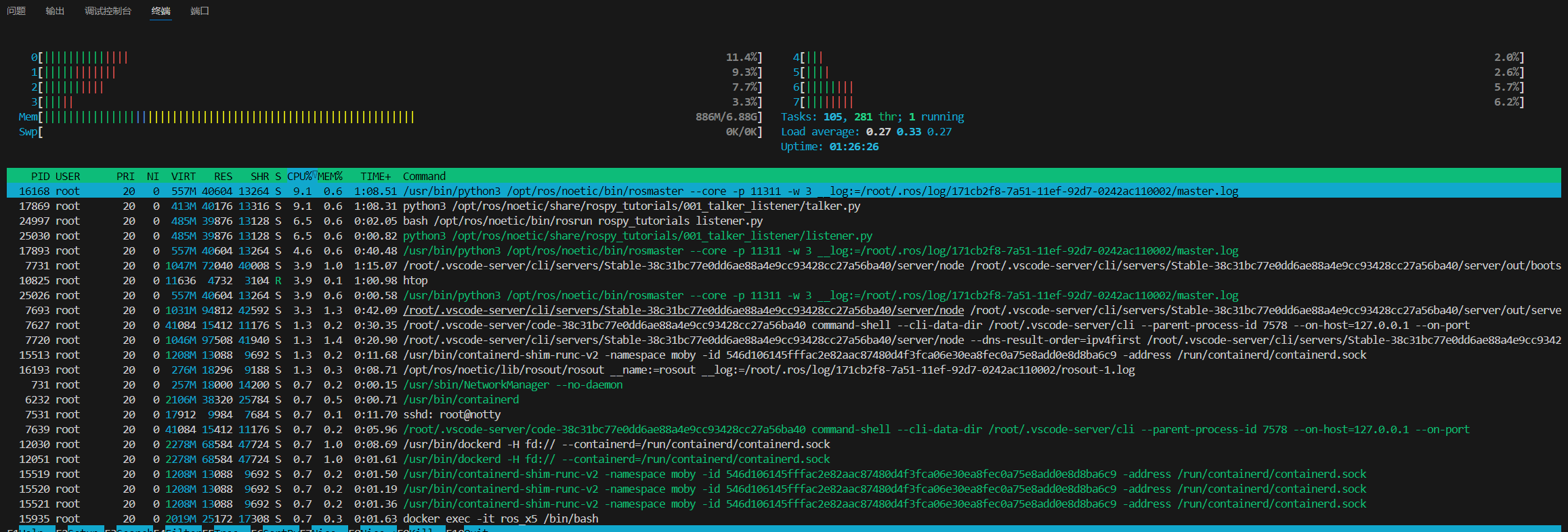
对硬件的消耗:-