本科阶段最后一次竞赛Vlog——2024年智能车大赛智慧医疗组准备全过程——10上位机使用
最近有点小事情,耽搁了一段时间,按照前面的进度,视觉寻迹、视觉YOLO已经结束了,接下来就是上位机的视觉交互了-
今天给大家带来,上位机的使用
1.FoxGlove
官方的给的上位机环境是Foxglove,这个软件也是第一次接触,该说不说第一次接触时候感觉确实界面好丰富啊,当时研究了好久,就是光连接通讯还捣鼓了一段时间,没事别怕我来复现坑。
1.1环境准备
首先先把板子配置下环境
sudo apt install ros-foxy-rosbridge-suite
ros2 launch rosbridge_server rosbridge_websocket_launch.xml

接下里根据百度网盘里面给的OriginCar快速上手指南的上位机篇 ,安装后先别急着打开
下载好的内容很丰富,我这里直接给大家一个最便捷的方式,反正比赛时候也不能改py代码,所以就怎么方便怎么来吧
image-20241216111250773
直接打开下面config.yaml配置文件,把IP改成你能够ssh上的小车IP
image-20241216111427957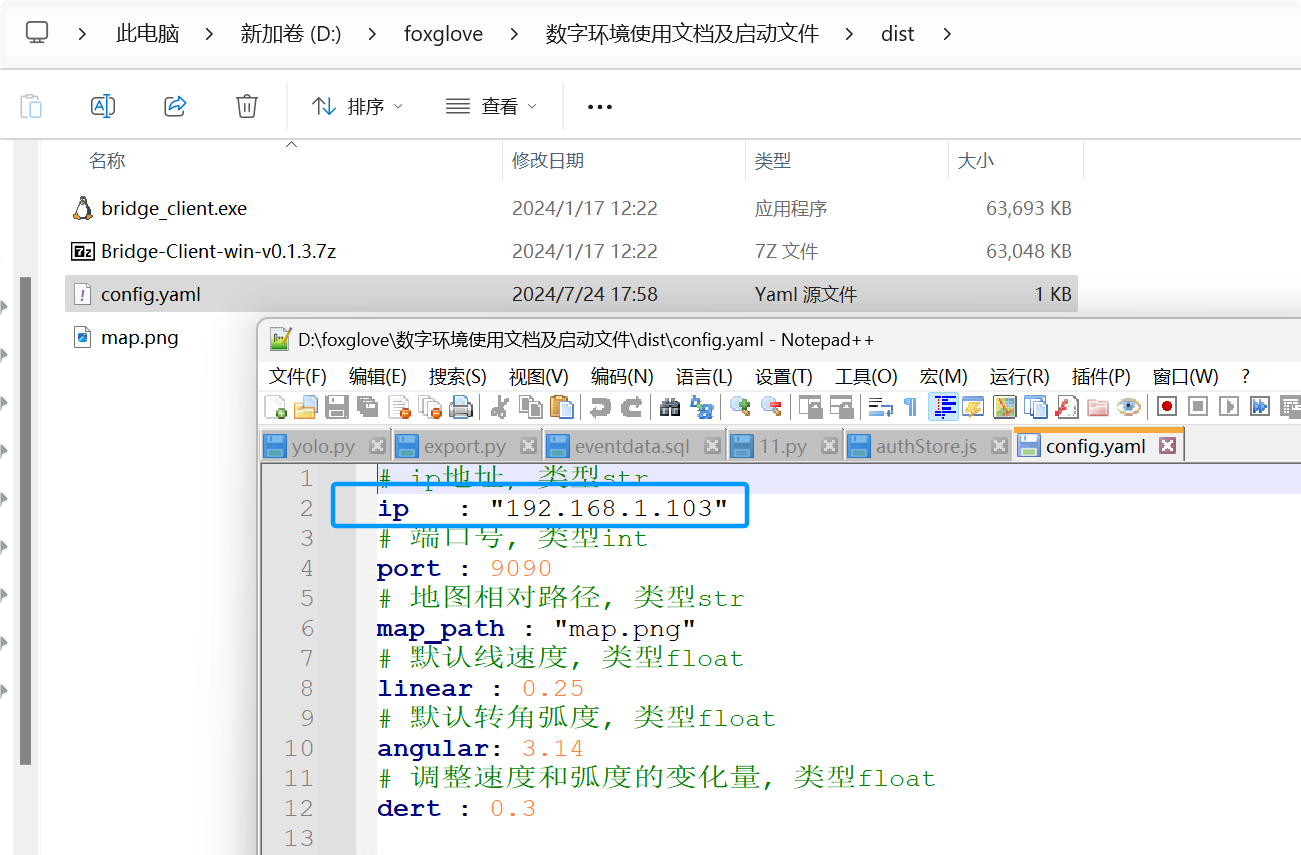
双击bridge_client.exe ,效果如下
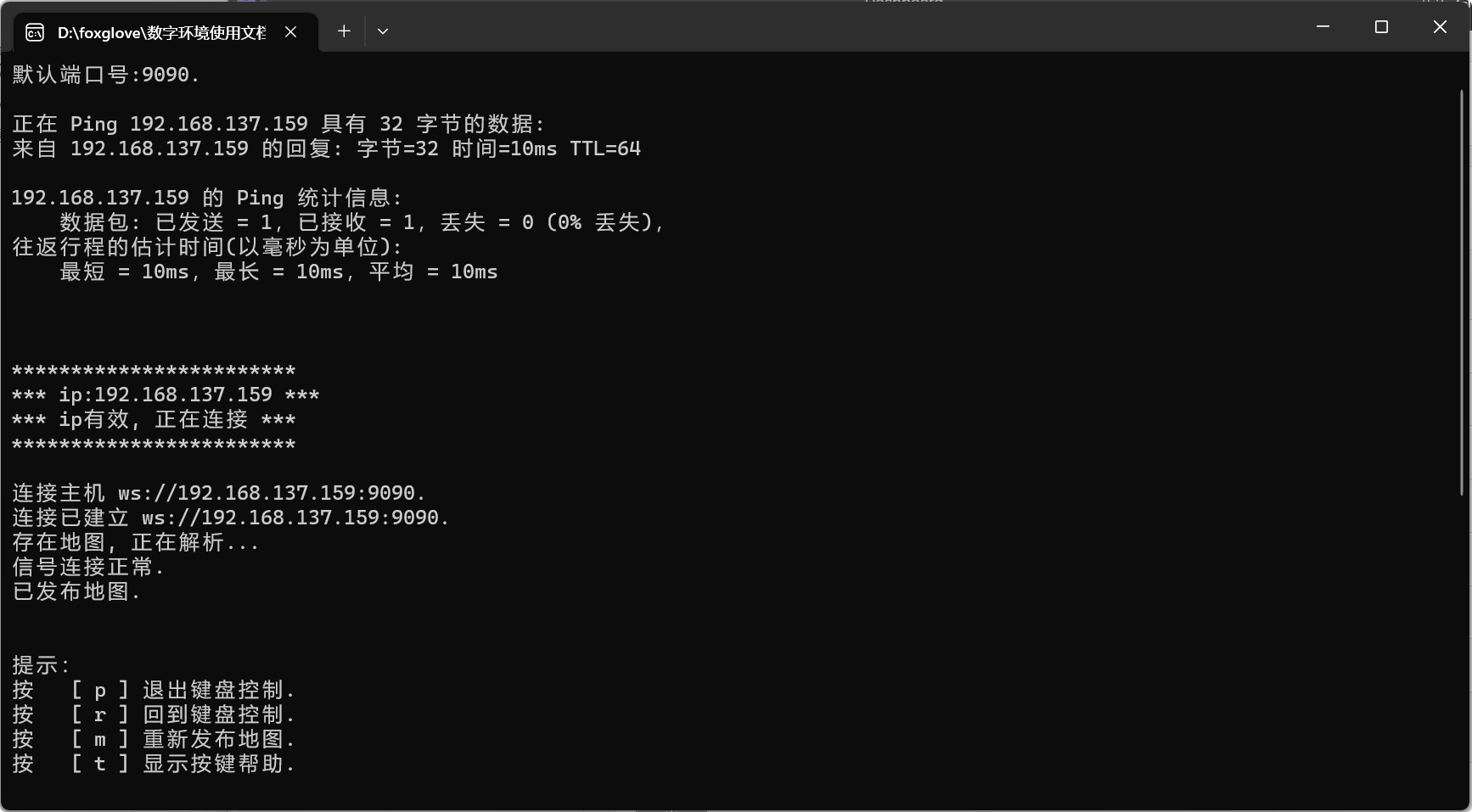
并且此刻还弹出了Foxglove,当然我这里没有一些入门提示,是因为我之前连接过,你可能没有不要紧,按照我下面的来
image-20241216111816206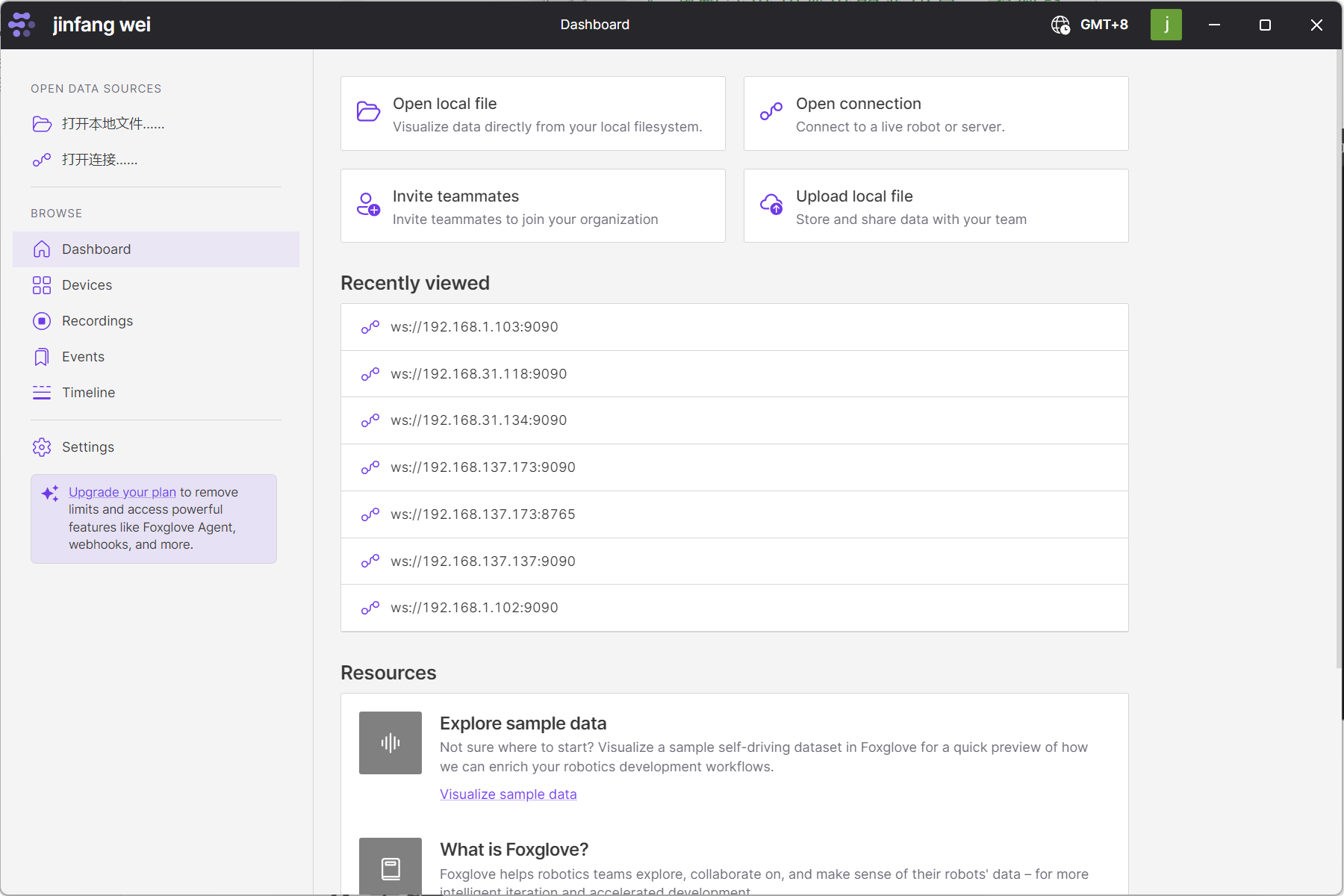
点击左侧打开连接依次点击,注意一定是点击rosbridge
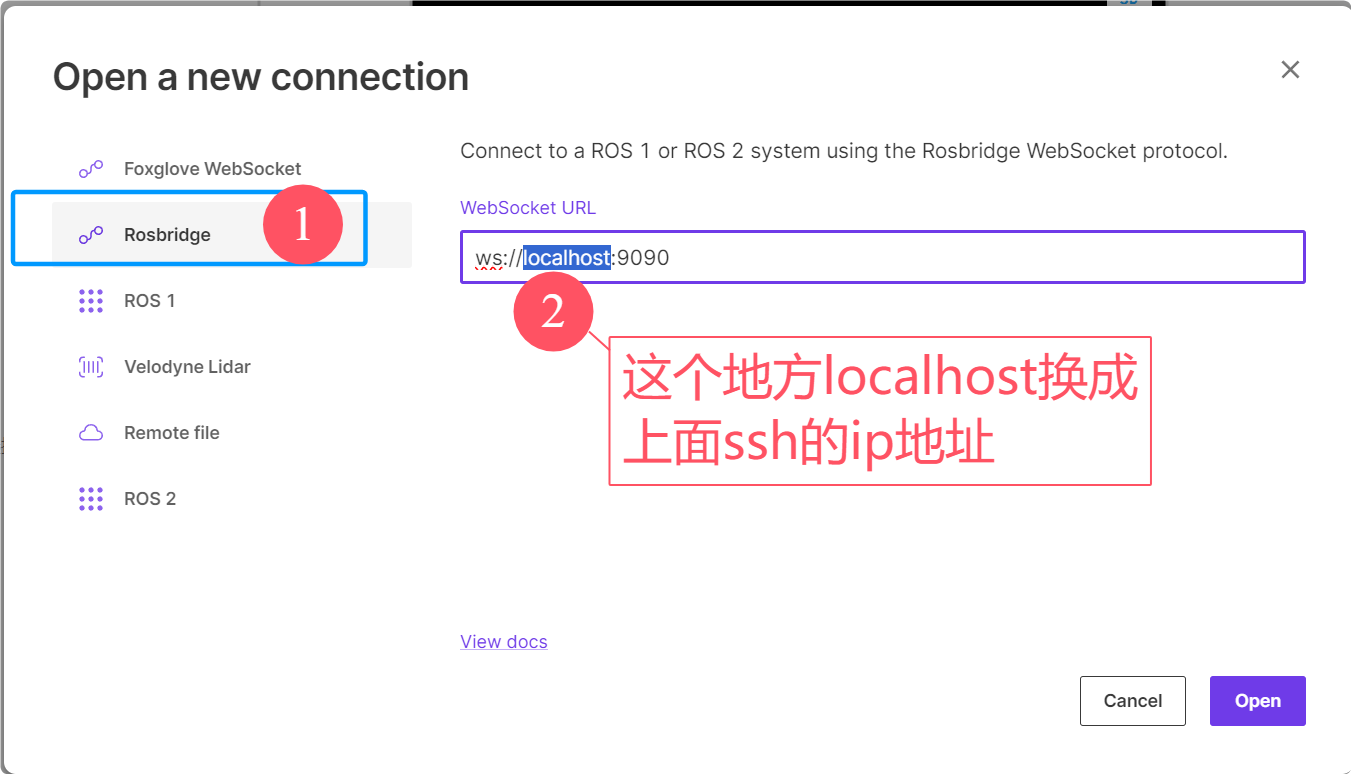
打开之后效果是下图,最上面显示了IP,如果连接不成功,最上面ws://最后会有一个红色感叹号一直在转圈
进来之后你可能没有地图,不过不要紧,第一打开没有导入布局,按照手册
image-20241216112703202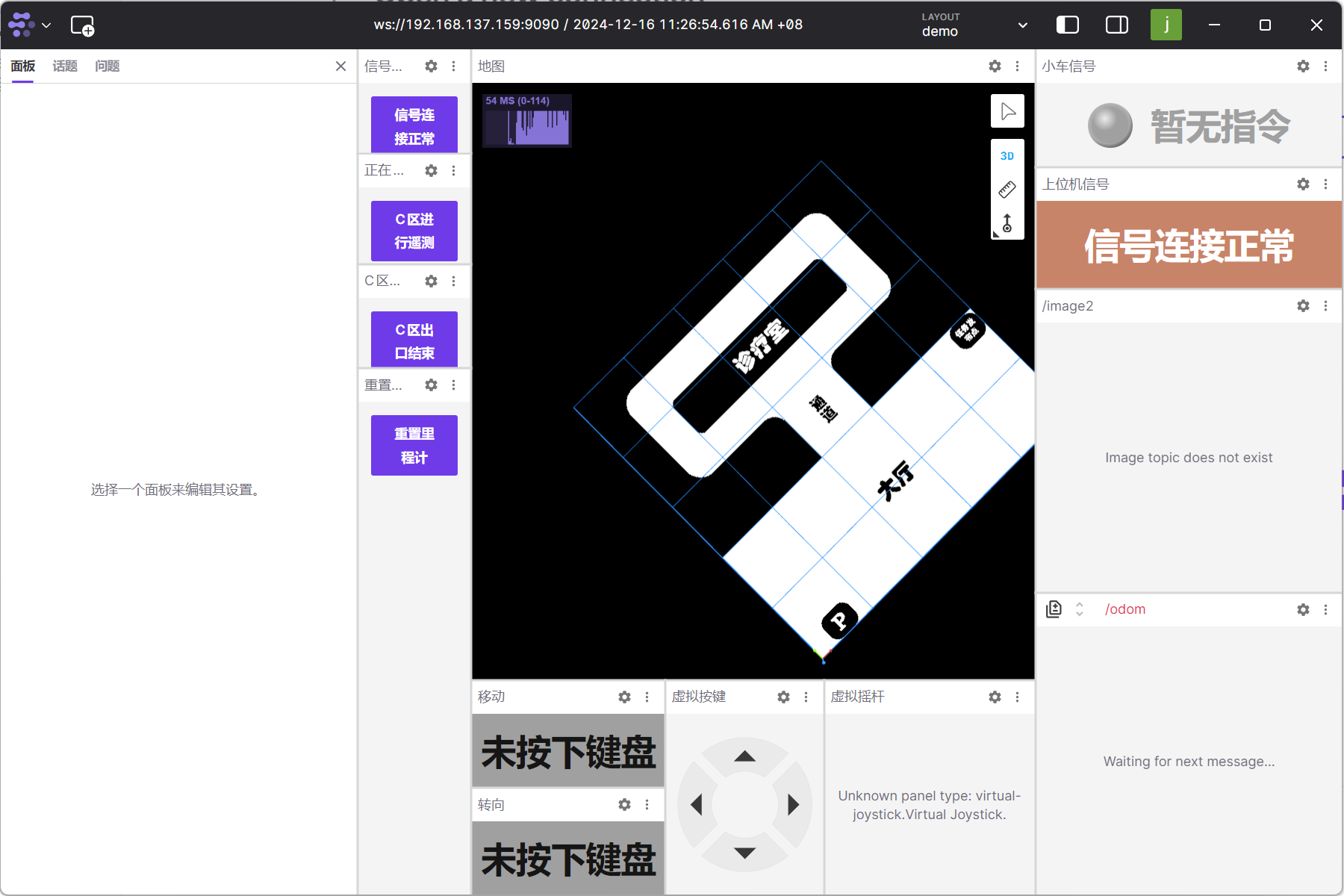
进来之后你可能没有地图,不过不要紧,第一打开没有导入布局,按照手册
image-20241216113031446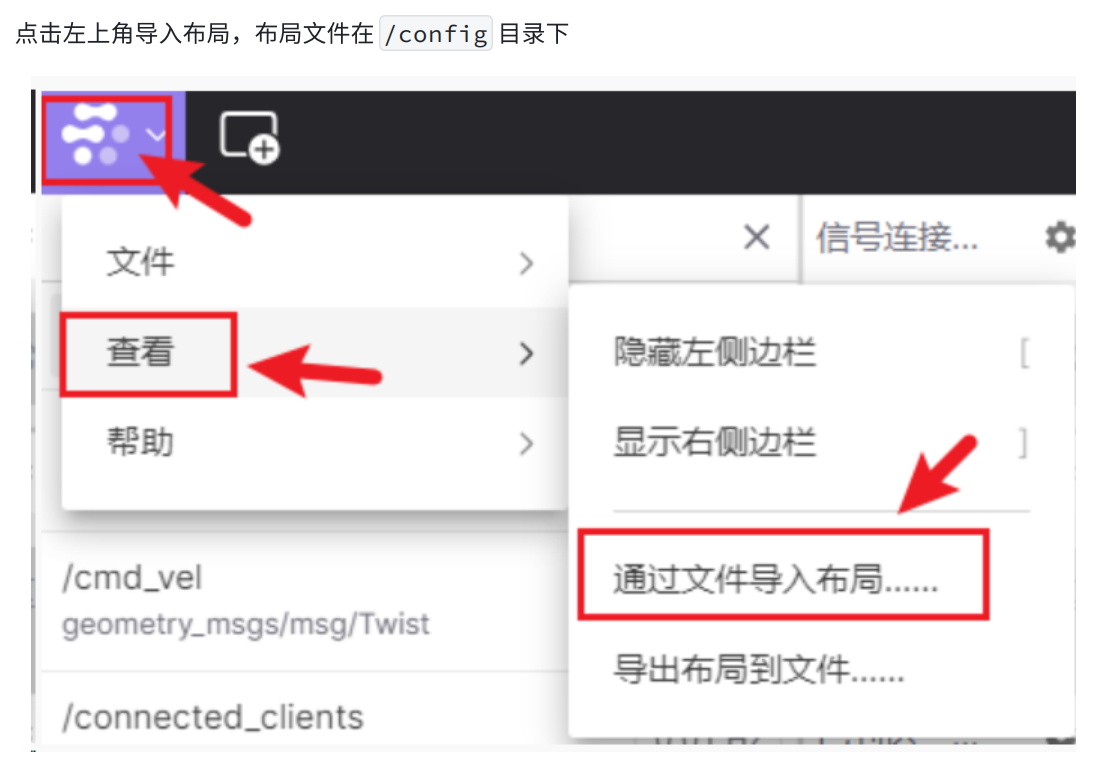
4.总结
对于Foxlglove这个软件还是蛮新的,第一次接触也是遇到点小坑,目前还是比较顺畅的
下一节给大家带来foxglove与小车的交互