代码:
import sys, os, time
sys.path.append('/usr/lib/hobot-srcampy')
import rclpy
from rclpy.node import Node
from hobot_vio import libsrcampy
import numpy as np
import cv2
class Vision_decision(Node):
def __init__(self, name):
super().__init__(name)
self.test_camera()
def test_camera(self):
cam = libsrcampy.Camera()
ret = cam.open_cam(1, 1, 30, 1920, 1080)
print("Camera open_cam return:%d" % ret)
time.sleep(1)
img = cam.get_img(2)
if img is not None:
fo = open("output.img", "wb")
fo.write(img)
fo.close()
print("success")
else:
print("failed")
cam.close_cam()
print("done")
def main(args=None):
print('Hi from single_camera_related.')
rclpy.init()
node = Vision_decision("follow_opencv_node")
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
finally:
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
报错信息:
image.png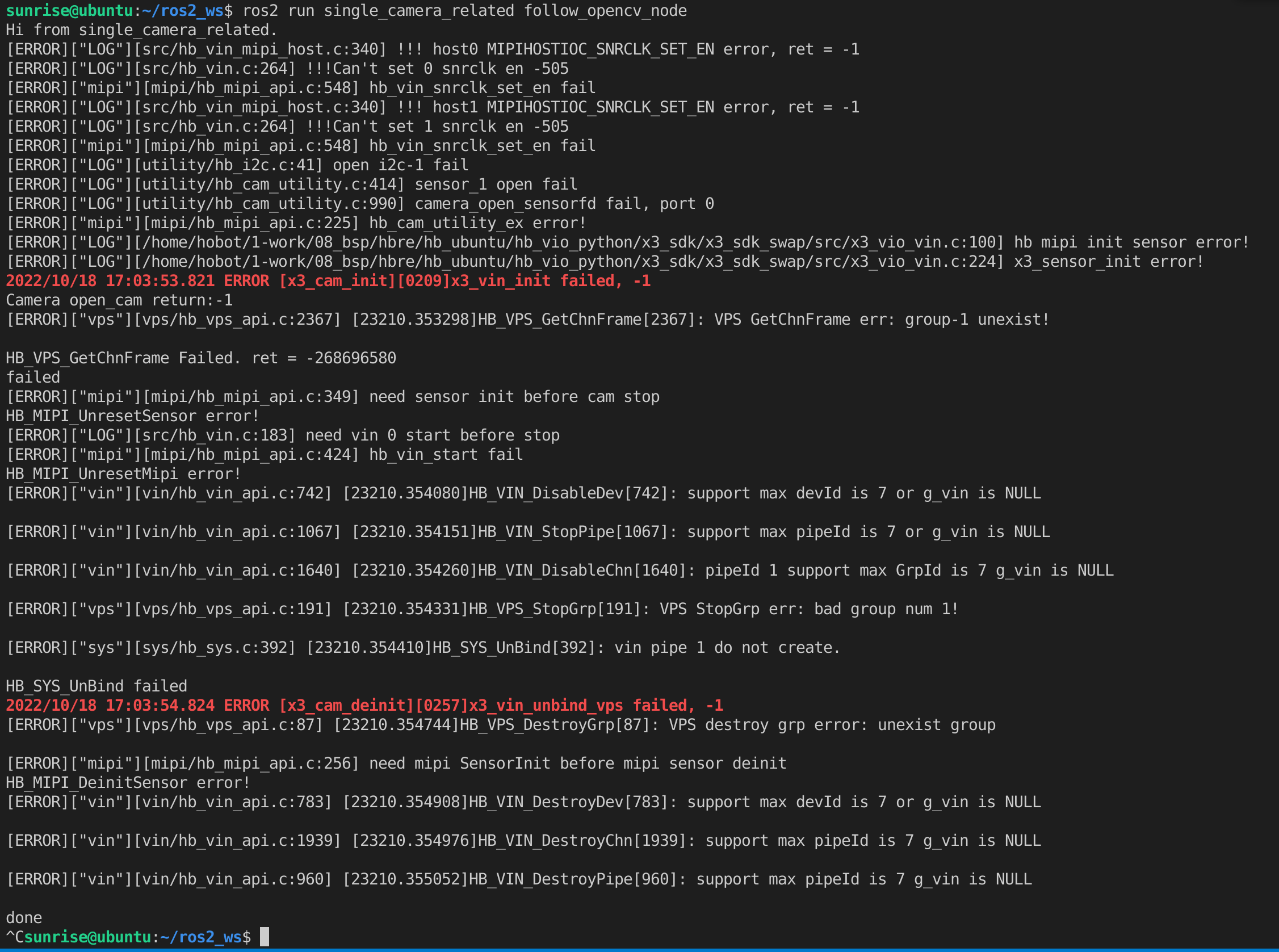
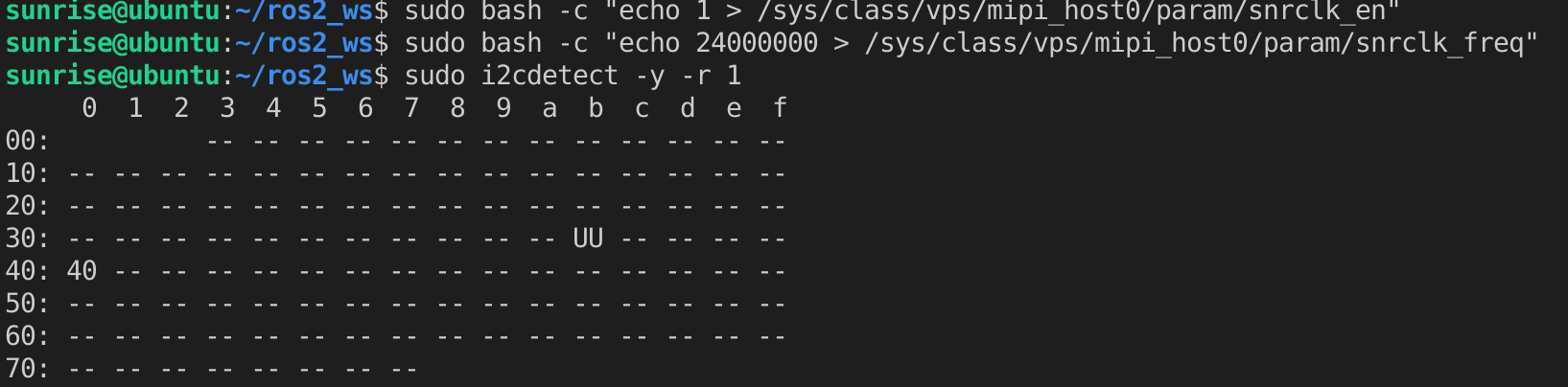
f37摄像头可以看到-