dirtybot
开源地址:https://github.com/MM-X/dirtybot-
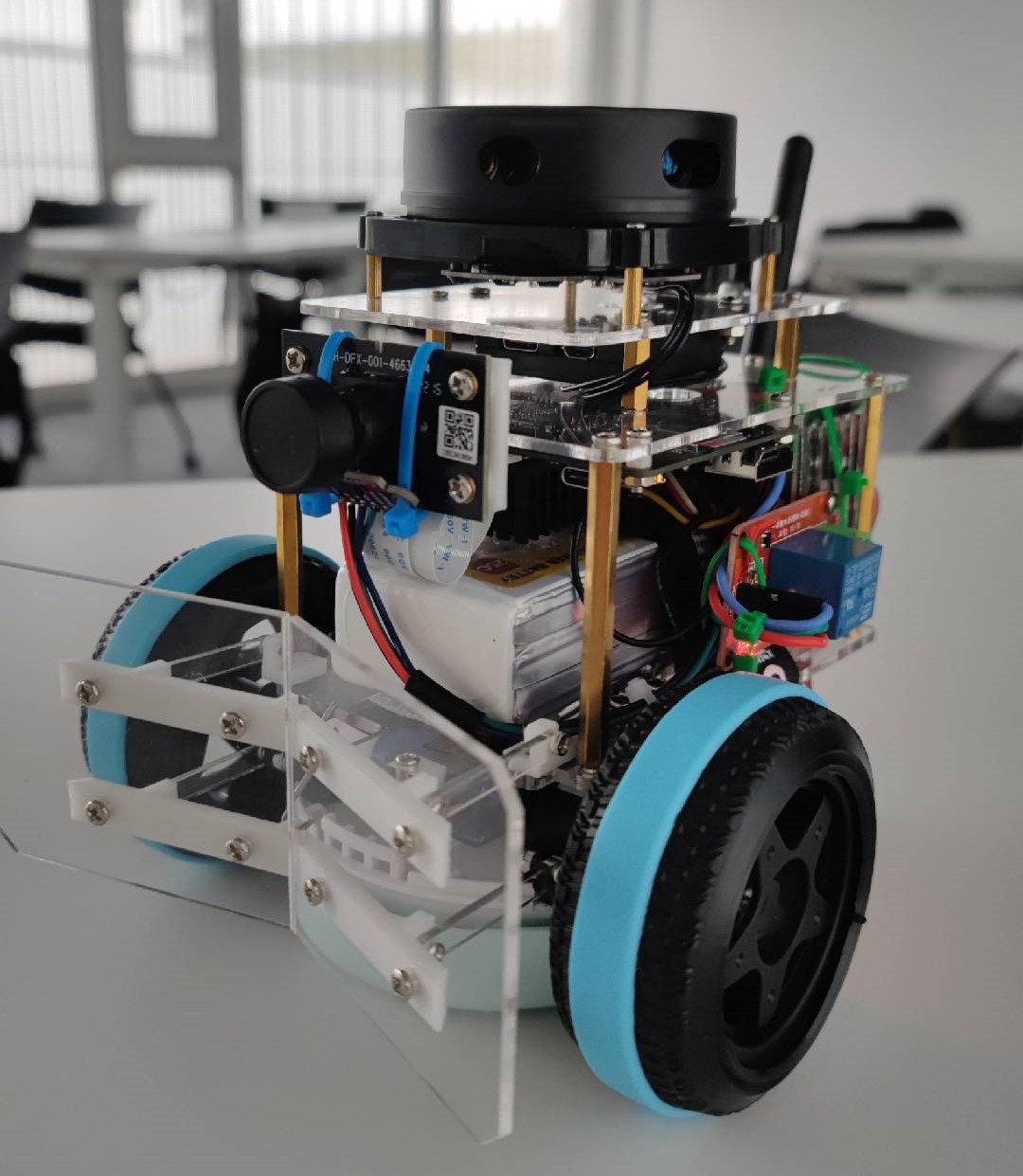
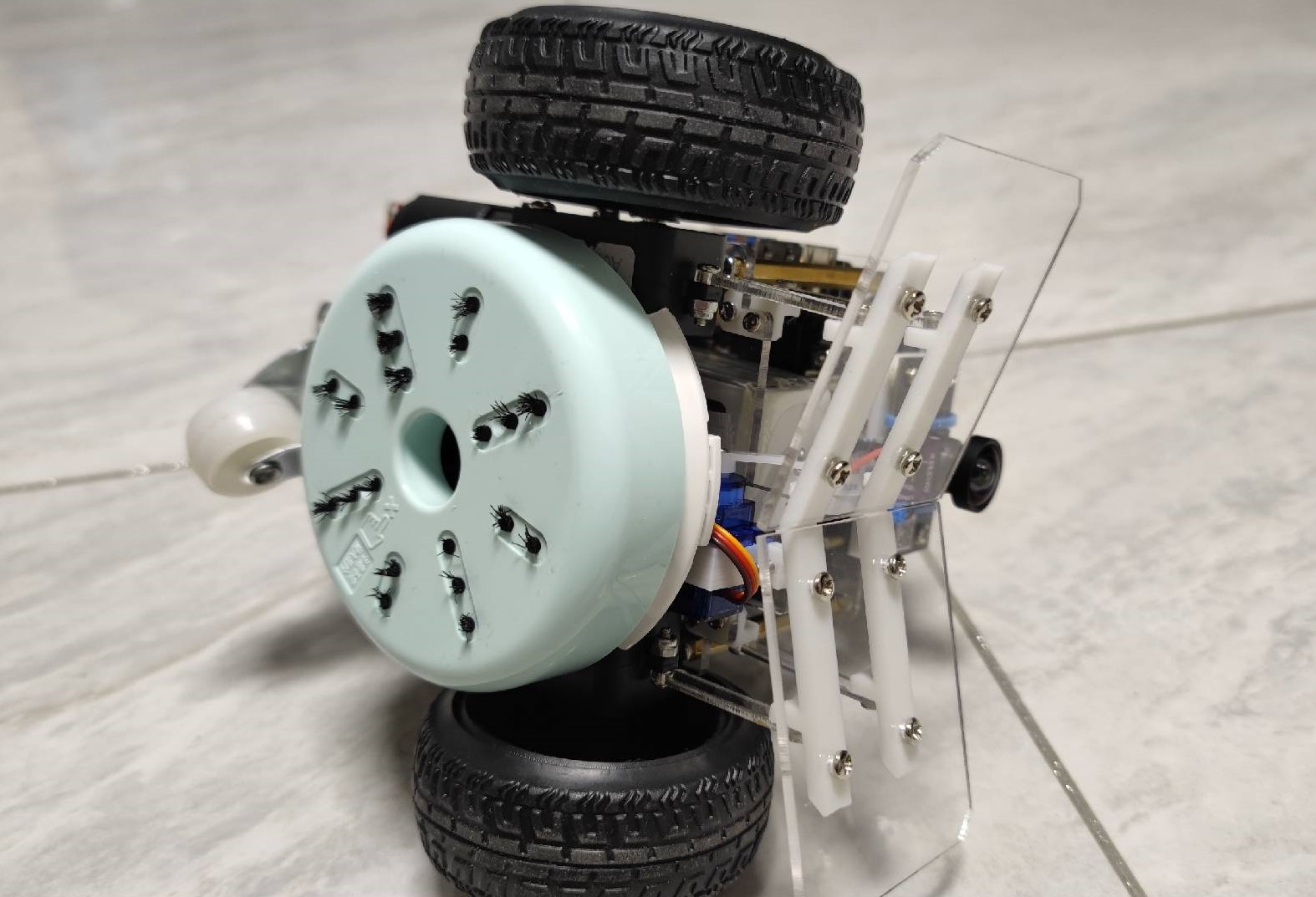
脏宝(dirtybot, diety bea)是一款基于地平线X3派和Togetheros以及Arduino的智能桌面语音小车,具备语音交互、感知、Slam建图和规划控制的能力,其优势在于:
- 采用少量3D打印和亚克力加工,DIY性强,采用成熟零件,成本低;
- 采用离线语音板子(只要64块RMB),界面化编程(不用敲代码),大大增强了小车的可玩性;
- 下层采用Arduino Nano(328P, 8bit)板,易于编程实现自己的奇思妙想,十几块钱照样上100HZ;
- 上层基于地平线X3派(比树莓派便宜,性能还比它强不少)和Togetheros(ros2),拥有现成的感知算法和一些应用(人体跟踪,手势控制)。
总之,本项目具备易上手和可玩性极强的特点,非常适合有些动手能力的人玩。当然,如果你想玩现成的,那么强烈推荐古月居的OriginBot智能机器人开源套件https://www.originbot.org/
文件夹
内容
3D model
三位模型图,stp格式
Arduino
mcu嵌入式代码
docs
文档图片
ros2
上层软件(跑在X3pi)的代码
voice
语音板的配置文件(可直接导入)
特别说明:-
本仓库的ros2目录下的代码来源于古月居的OriginBot, 开源代码仓库:https://gitee.com/guyuehome/originbot, 并根据下层的传感器适配需求做了一定的更改,目前仅修改了originbot_base和originbot_msgs两个文件夹里的部分代码;并且上下层通讯协议也是基于OriginBot的串口协议做的相应修改。在这里特别感谢古月居,带领很多人进入了ros的乐园。
小demo视频(功能不局限于此):-
对于可实现功能的建议:
按具体功能划分:
- 自主清理垃圾——将桌面大的垃圾推到地面,小的垃圾(和尘土)收集进入垃圾储藏室
- 语音控制、手机App控制、键盘控制、手势控制
- 人体跟踪、猫狗跟踪、语音交互(到杯子那里去,到垃圾桶那里去,把杯子推回来,建图后打乱桌面物品让车子恢复原样,播报摄像头的检测到的内容,发现人站在车前播放:别当我路等等,功能取决于你的想象)
按涉及领域划分:
- 语音交互:语音唤醒、语音开关机、语音控制车辆运动、语音调参、语音启停进程(开启关闭人体跟踪控制)、被识别物体语音播报
- 感知:目标检测与分割、根据自车位置推测目标的平面位置和尺寸(结合cam和lidar)
- 定位建图:slam建图和更新(包括正障碍-杯子, 结合tof建立负障碍-桌面边缘)
- 规划控制:导航规划,路径规划,跟踪控制
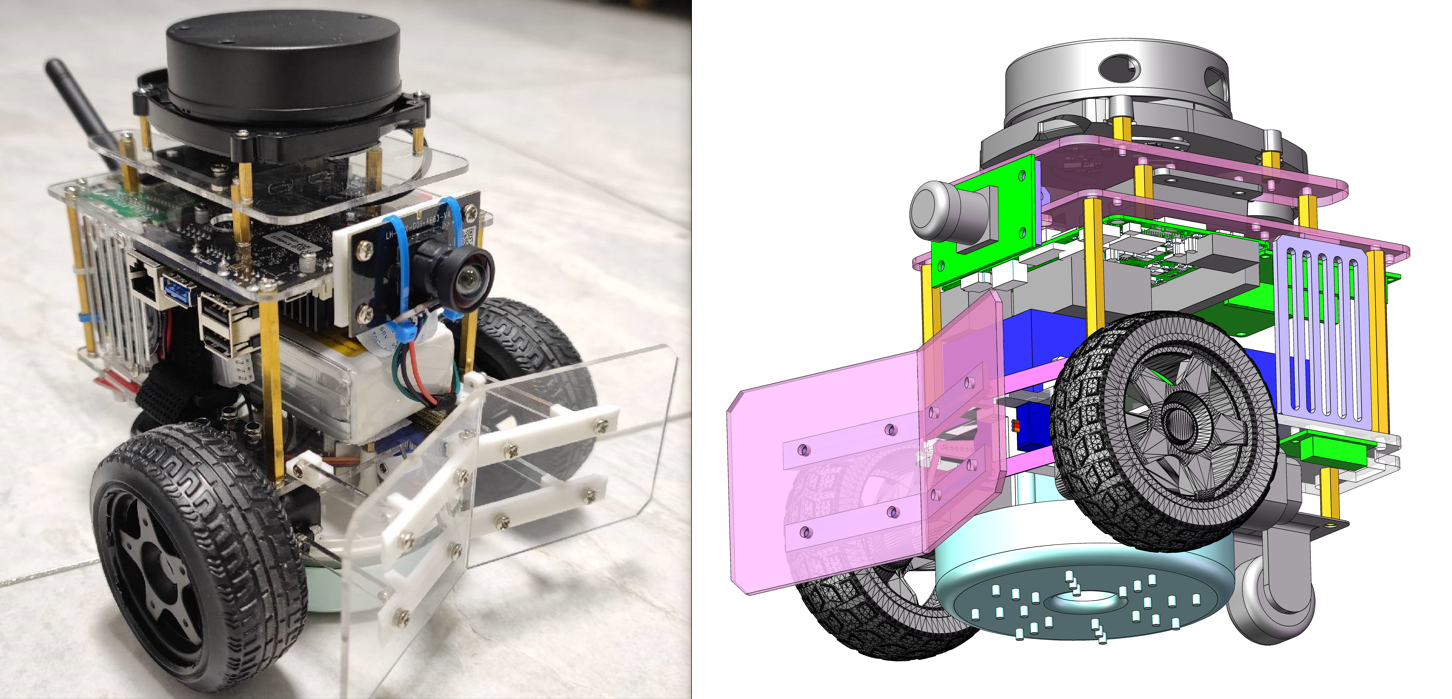
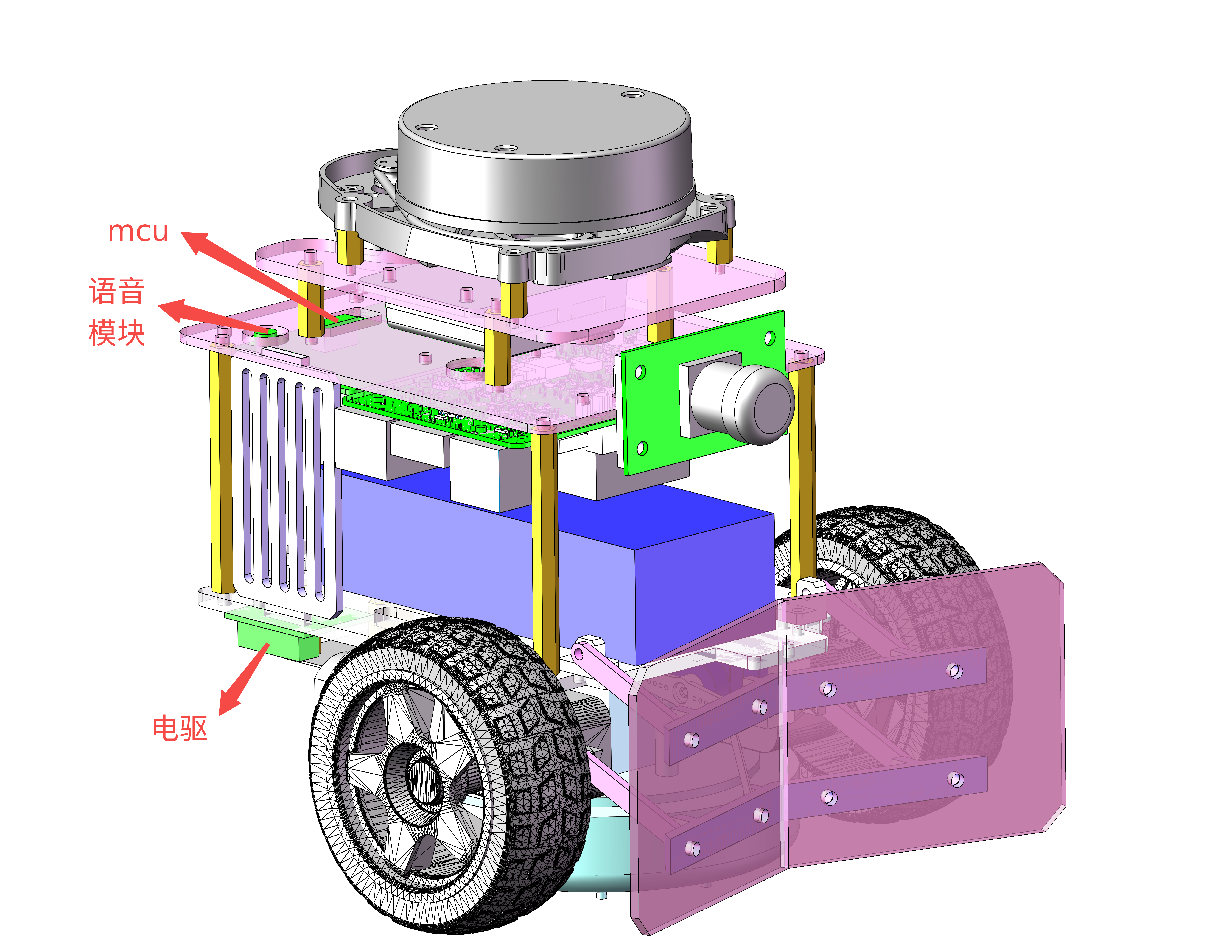
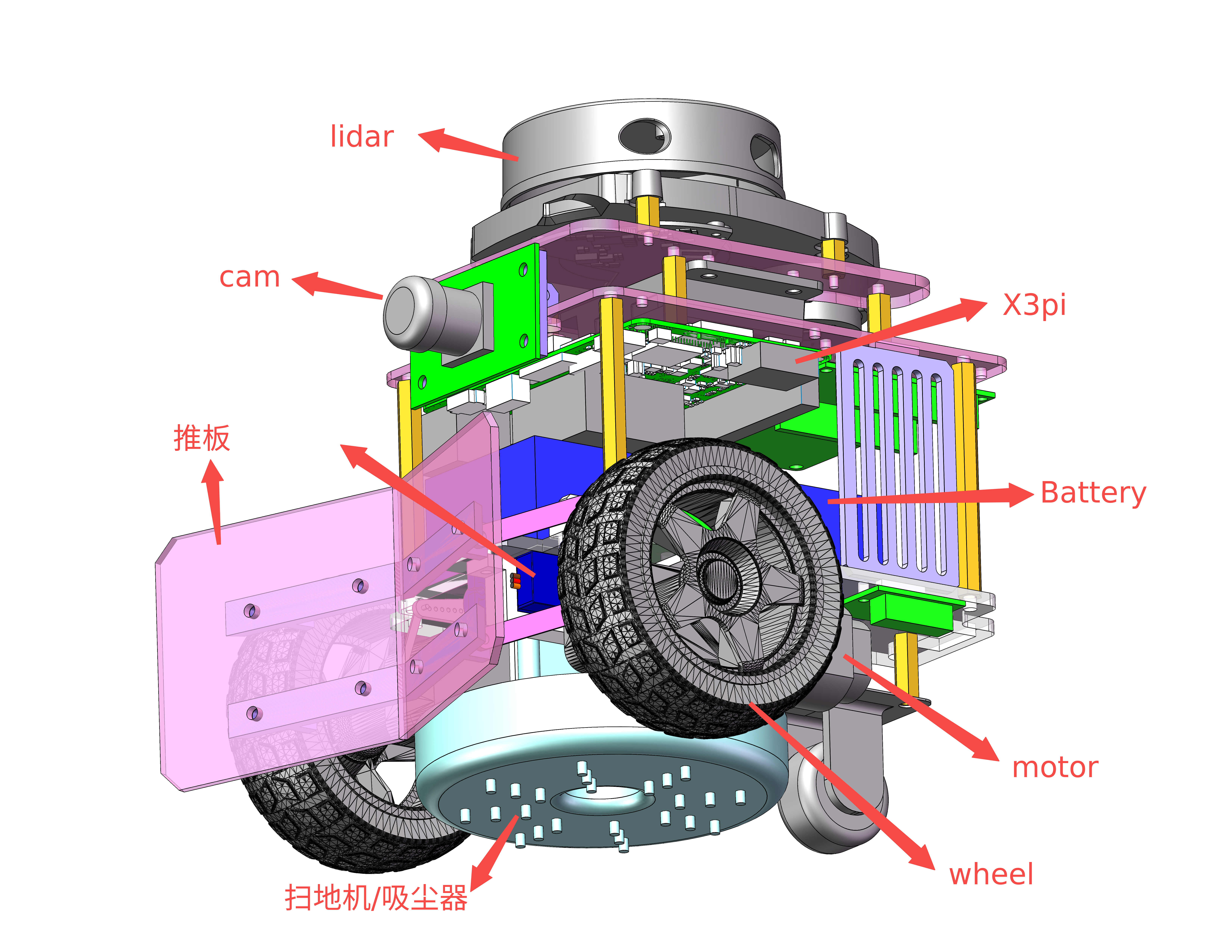
硬件组成和成本清单:
硬件结构图:-
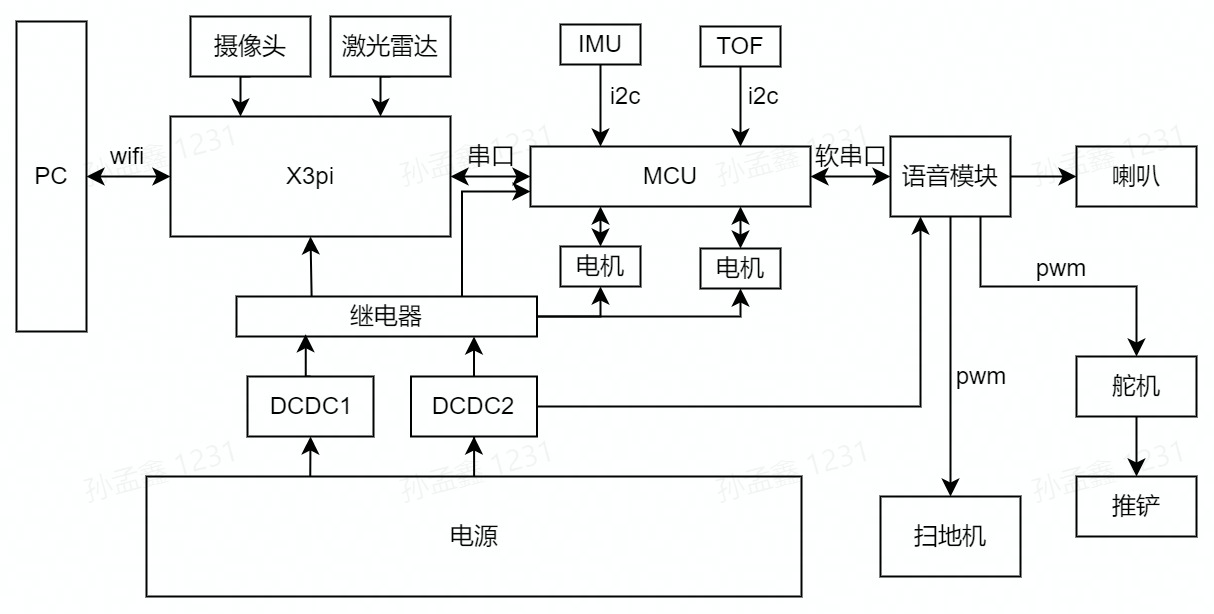
说明:
- 摄像头识别,激光雷达slam建图
- IMU和轮速计(编码器)odom推算
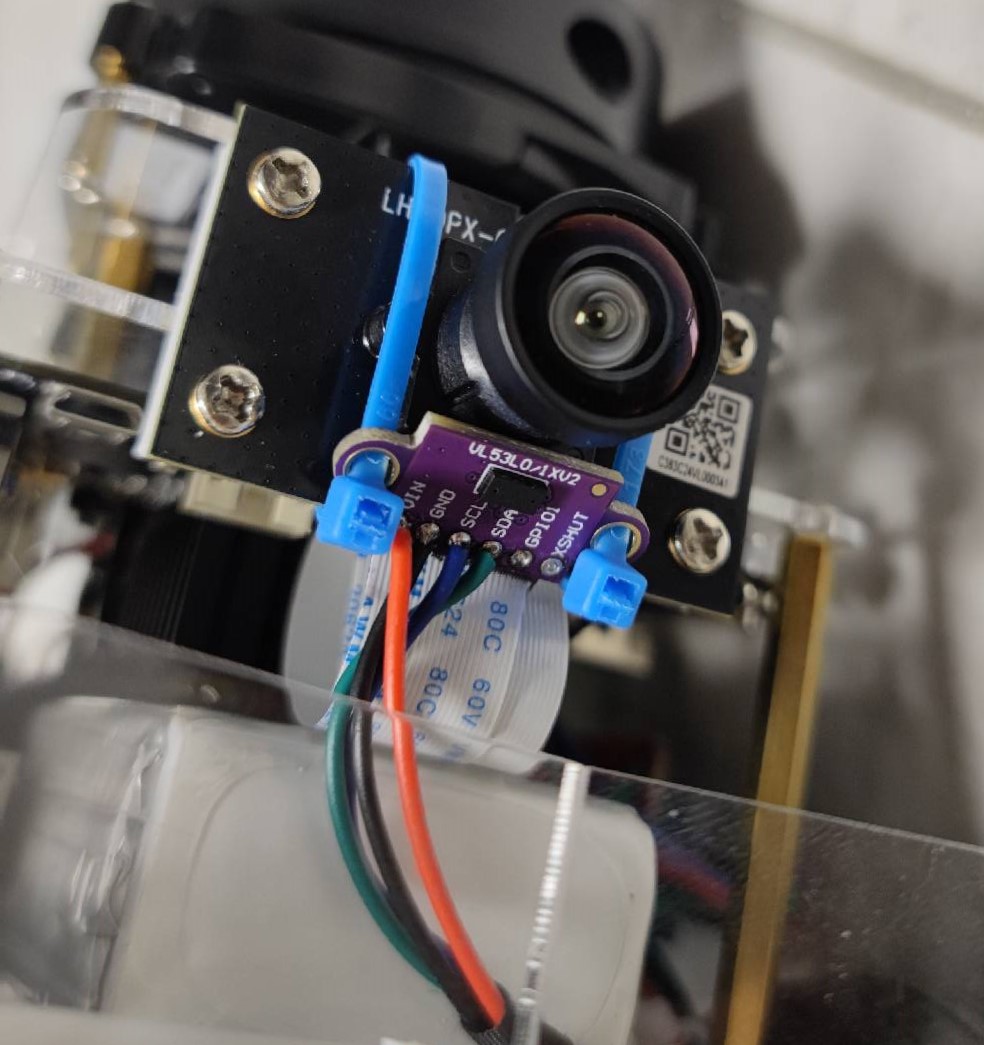
- TOF是斜向下安装,用于提前检测车辆是否到达桌面边缘,如下图
- 继电器用于控制耗电量大的设备(语音模块可以长期待机)
TOF
扫地机
名称
型号
数量
价格
图片
链接
开发板
X3派
1
549

摄像头
GC4663
1
129

激光雷达
YDLIDAR X3
1
299

电机
2
35*2

MCU
Nano
1
15
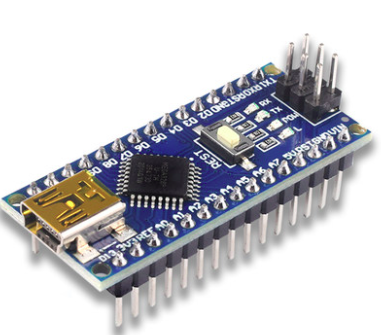
我红色的,网上好像没了
语音模块
1
64

电机驱动
2
3.7*2

IMU
MPU9250
1
42
DCDC
3A
1
7.2*2

继电器
5V
1
3.9

舵机
2
12

桌面清洁
1
58

TOF
VL53L0X V2
1
13.8

亚克力加工
1
19
3D打印
1
50
有点贵,自己找找把
杂七杂八
N
50
螺丝、舵机拉杆、扎带杜邦线、铜柱等
总计
1398
e,成本好像也不低,前三个大头
软件组成:
Arduino:
arduino用到了两个库,这连两个i2c总线设备共用一路i2c :
- tof:https://github.com/pololu/vl53l0x-arduino
- mpu9250(imu的校准程序在此库的历程里面,由于nano内存有限,需要校准imu的话需要先通过例程程序校准):https://github.com/hideakitai/MPU9250
端口定义:
const uint8_t Motor1_PinA = 5;
const uint8_t Motor1_PinB = 6;
const uint8_t Motor2_PinA = 9;
const uint8_t Motor2_PinB = 10;
const uint8_t Encoder1_PinA = 2; //中断1
const uint8_t Encoder1_PinB = 4;
const uint8_t Encoder2_PinA = 3; //中断2
const uint8_t Encoder2_PinB = 7;
SoftwareSerial mySerial(12, 13); // RX, TX
通讯协议:-
主要协议参考:https://www.originbot.org/manual/protocol_description/
差异在于:
- imu的数据发送 = 处理后的数据/100, 而不是原始数据
- 传感器反馈里面没有电压值,有mcu的循环时间和转发语音板的语音指令
- 控制器资源控制为从x3pi接收到的需要转发的语音板的指令信息
语音板子:
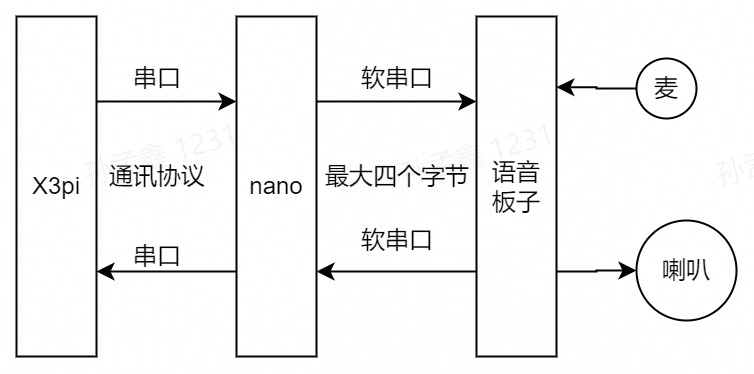
由于MCU和语音板子单词最多传输4个字节,且语音板子处理逻辑有限,因此mcu他们之间的传输只能依靠提前定义好的协议(比如 1 = 自建通过),且X3pi和语音板子的通信是通过MCU中转,因此也需要定义他们之前的协议,例如FCOS检测算法的80种类型分别对应80个整数,以此来实现被检测目标名称的语音播报。
X3pi:
有关上层相关的软件部分,地平线开发者社区和古月居已经给出了详细的参考文档:
- 地平线开发者社区旭日X3pi的说明书:https://developer.horizon.ai/api/v1/fileData/documents_pi/Quick_Start/Quick_Start.html
- 地平线开发者社区Togetheros的说明:https://developer.horizon.ai/api/v1/fileData/TogetherROS/index.html
- 地平线开发者社区AI工具链:https://developer.horizon.ai/api/v1/fileData/doc/ddk_doc/navigation/ai_toolchain/docs_cn/horizon_ai_toolchain_user_guide/index.html
- 古月居:https://www.originbot.org/
结尾
- 欢迎大家提出好的建议,在Issue里提问题,不定期查看
- 该文档会同步到地平线开发者社区,欢迎大家去查看,评论
- 该项目完全开源,欢迎大家魔改
- 有时间就持续更新。。。