本文基于地平线RDK X3派实现了RGB-D相机、激光雷达和IMU的传感器融合三维建图。由于光学设备自身的缺陷,单一视觉感知系统在弱纹理、光线剧烈变化的环境中存在特征点提取困难、位姿估计失效等问题,通过激光雷达的高精度、高稳定性等优势弥补单一视觉传感器在应对复杂、不利环境时的局限性,能够显著优化系统的整体性能和鲁棒性。
硬件方案设计
总体结构框图
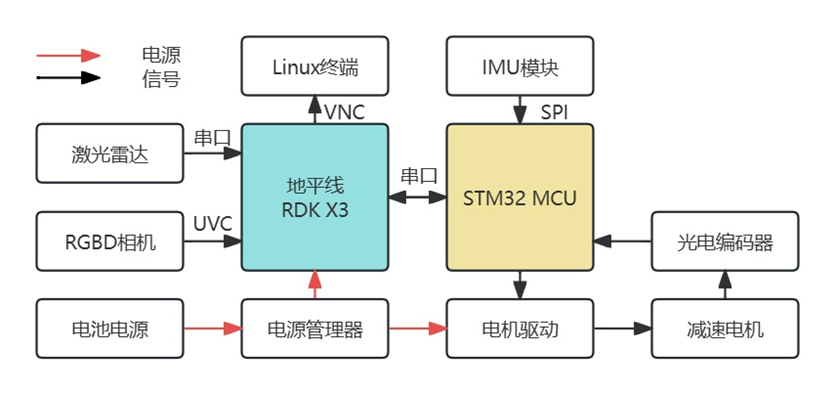
控制系统
移动平台的核心控制板是其“大脑”,在整个系统中发挥着至关重要的作用。它不仅管理和协调机器人的各个功能模块,还执行关键的控制算法,确保机器人能够高效、准确地完成各种任务。在本次设计中选择地平线 Robotics Developer Kit X3作为整个机器人系统的主控制器,其搭载四核ARM Cortex-A53处理器、丰富的外设接口、优秀的AI性能为设计和开发提供了极大的支撑。利用其高效的计算能力以对各传感器数据进行处理,实现建图等功能。
以STM32微控制器作为辅助控制板,其具有高效的实时处理能力且STM32扩展板可以提供更多种类和数量的I/O接口,如GPIO、UART、I2C、SPI等,方便连接更多的传感器、执行器和其他外设。此外,STM32系列微控制器具有广泛的开发资源和生态支持,包括丰富的库、驱动程序、开发工具等。
传感器系统
双目RGB-D深度相机是一种通过模拟人类双眼的工作原理来获取场景深度信息的传感器。它由两台相机组成,分别捕捉场景的左视图和右视图,并通过立体视觉算法计算每个像素点的深度信息。这使得机器人能够感知周围环境的三维结构,从而精确测量物体的距离和位置,生成详细的深度地图。双目深度相机还可以实时检测环境中的障碍物,并提供其距离和大小信息。本设计中采用DABAI DCW2双目结构光深度相机。DABAI DCW2是一款高性能的双目结构光RGBD相机,通过结合双目视觉和结构光技术,能够同时捕捉高分辨率的RGB图像和精确的深度信息,旨在提供高精度的深度感知能力。

激光具有良好的抗干扰性和直线传播特性,故激光测距具有很高的精度。基于激光测距原理的激光雷达,测距精度往往可以达到厘米级或毫米级。本设计中采用A1激光雷达。激光雷达是一种用于环境感知和定位导航的高精度传感器。它采用三角测距法测量周围环境的轮廓图,其测距核心顺时针旋转可实现对周围环境的360度全方位扫描测距检测,提供厘米级别的高精度距离测量。并且具有高分辨率的扫描能力,可以捕捉环境中的细微变化和小型物体。

移动平台最终实物

软件方案设计
RTAB-Map是一种基于外观的实时建图(SLAM)算法,通过提取视觉特征和深度信息,利用图像外观进行环境建图。RTAB-Map使用词袋模型(Bag-of-Words)对视觉特征进行描述和匹配,检测机器人是否回到之前访问过的位置。当检测到回环时,通过全局图优化对整个轨迹和地图进行调整,减少累积误差。RTAB-Map的图管理系统将新节点添加到全局图中,并建立节点之间的连接。通过高效的特征提取和匹配算法,结合词袋模型,RTAB-Map实现了实时的环境感知和地图更新。
设计采用以视觉传感器为主,以激光雷达和IMU为辅基于松耦合的多传感器融合实现地图构建的方案,以下是松耦合的方式分析。
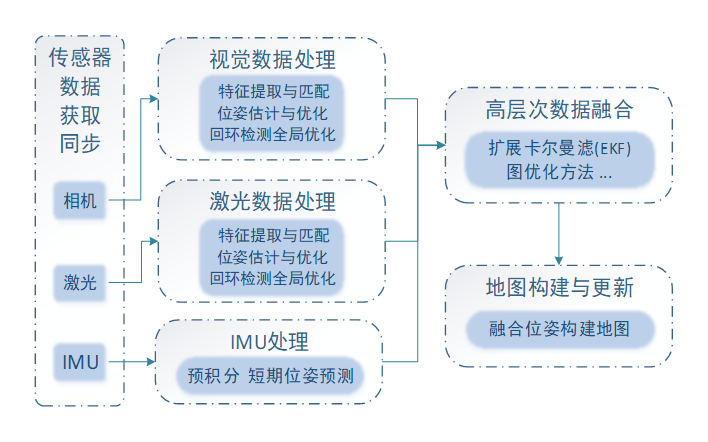
方案流程如下:
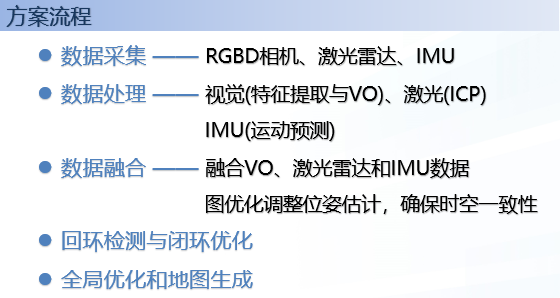
多传感器融合提高了定位和建图的鲁棒性和精度,在实时运行中处理和更新地图,适用于动态应用需求,松耦合方式使得系统灵活性提高。
实验结果测试
场景搭建

场景中限制了智能移动机器人的活动空间范围。考虑到SLAM中的单应性也就是特征点共面问题,设计相对平整的壁面;而场景的右侧由纸箱和椅子搭建,空间特征相对复杂,以模拟复杂环境中可能出现的不可预测物体和混乱的姿态。同时,在场景中放置了圆台形垃圾桶、圆柱形灭火器和长方体形反光手提箱,以模拟实际环境中可能出现的各种随机物体。
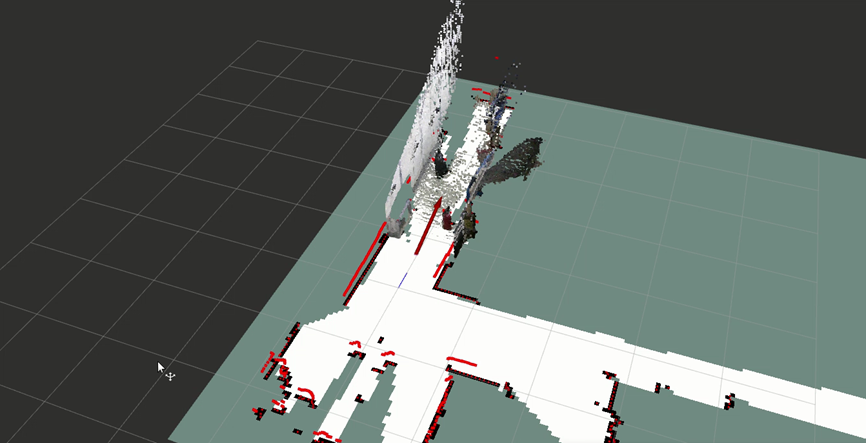
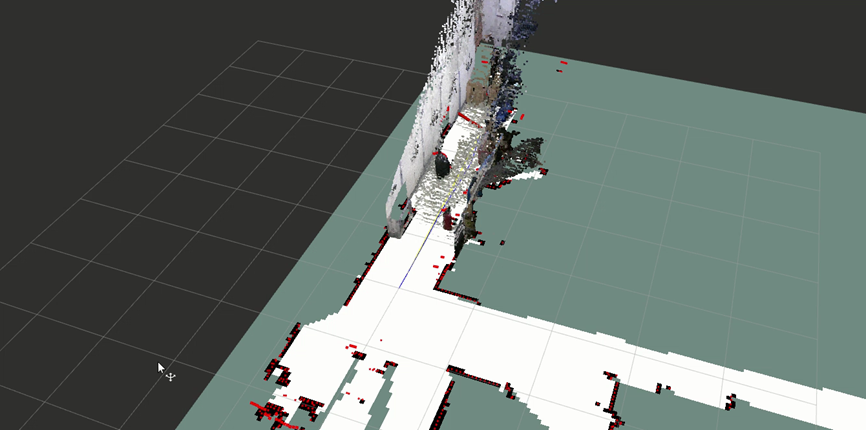
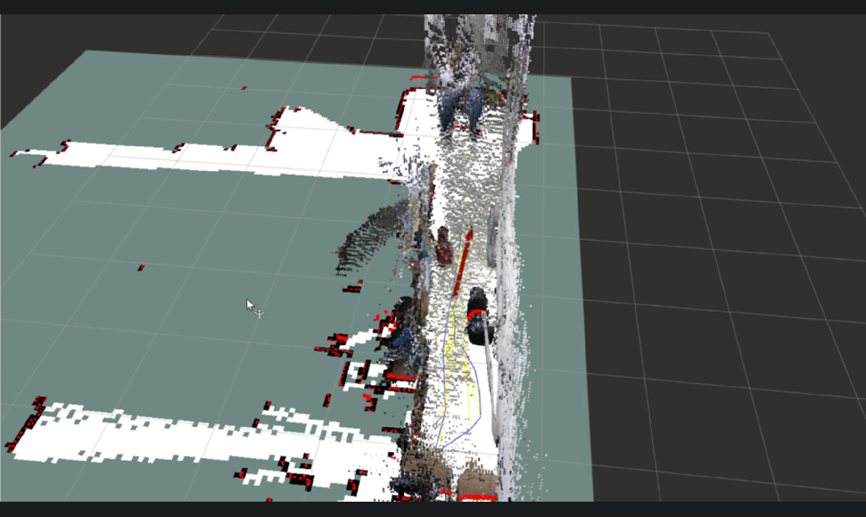
以上三张图是建图结果部分视角截图。在初始阶段,智能移动机器人在初始阶段对前方环境特征进行扫描建图,从图中可以分辨出灭火器与垃圾桶的空间位置及形状特征,但较远处的环境特征尚未能完全扫描。第二张图智能移动机器人到达场景最远处时完成的特征扫描与地图构建,可以观测到最远处纸箱的形状特征及其周围环境特征。最终,智能移动机器人返回起点时构建完整地图,灭火器、垃圾桶、反光手提箱的特征及空间位置清晰显示。同时,之前因相机视角限制未能扫描到的平整壁面特征也得到了完整的扫描与构建,场景右侧复杂物体的特征及颜色信息在图中得以呈现。
结论
智能移动机器人在两种场景中的建图结果展示了其在复杂环境中进行高精度三维建图的能力。机器人能够逐步完善对环境的扫描与建图,尽管在初始阶段存在一定的视角限制,但通过进一步的移动和扫描,最终能够构建出全面和准确的场景地图。通过对不同场景的特征扫描和建图,验证了机器人在不同环境下的适应能力和高效的地图构建能力。
通过实验和测试,验证了激光雷达与双目深度相机融合进行三维建图的有效性和优势。激光雷达提供了高精度的距离测量,能够准确捕捉环境中的细节信息,而双目深度相机则提供了丰富的视觉信息,补充了激光雷达在近距离和复杂纹理环境中的不足。综合来看,激光雷达与双目深度相机的融合方案显著提升了三维环境感知和建图的效果,不仅提高了建图的精度和实时性,还增强了系统在动态和复杂环境中的适应能力。