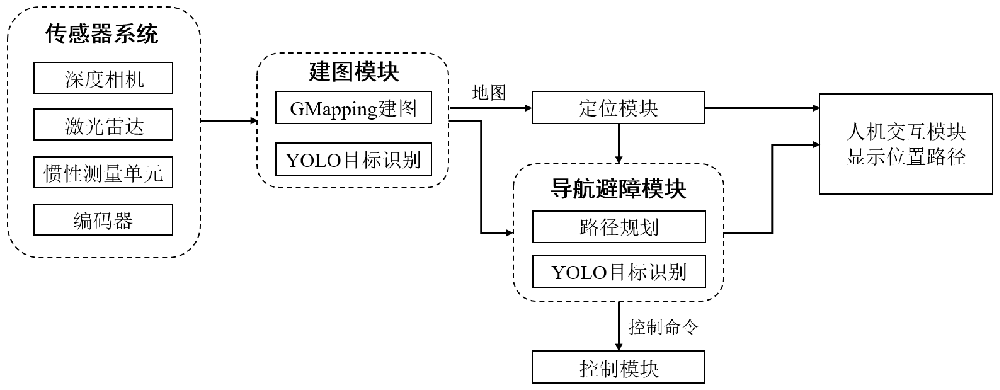
我们实现对环境的建模,并使移动机器人能在建好的地图中导航至指定地点并自动避开移动行人。使用传感器系统、建图模块、定位与导航避障模块、控制模块、人机交互模块协同完成任务。
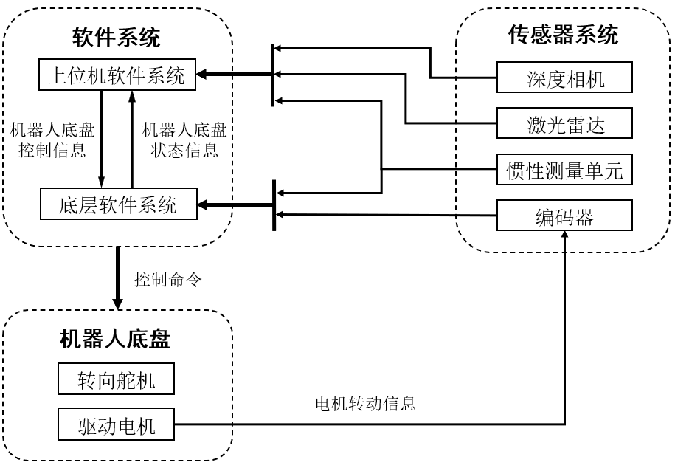
物流机器人的运动框架如上图
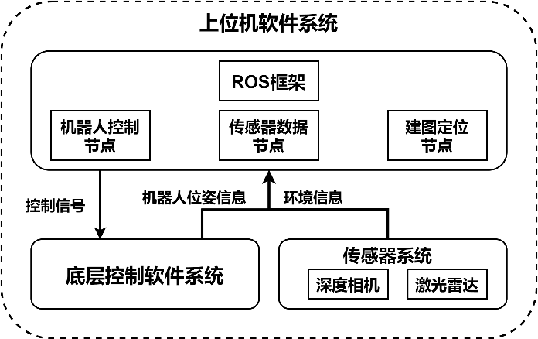
核心的软件系统中,上位机使用ROS1机器人操作系统管理各个节点与节点间的通讯,比如订阅相机、雷达等传感器的信息,在建图节点中发布位姿、地图话题等等。
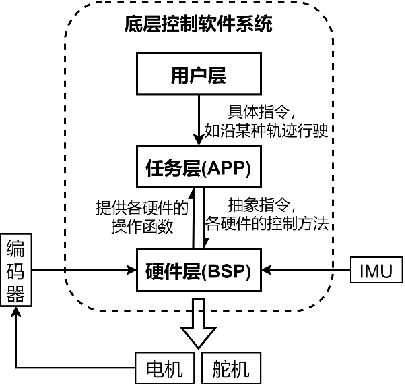
控制指令将会被分解成各种任务交由任务层执行,即调用任务层中所定义的各种函数,各函数又将会被分解成各个硬件的具体操作指令,层层包装具体化,增加代码整洁性、易读性、可维护性。