基于RDK X3的多功能无人机部署流程
1.硬件清单
机架:QAV250机架-
电机:致盈动力 QAV2206 1900KV无刷电机-
电调:银燕30A-
飞控:holybro v6cmini-
相机:D435i-
激光雷达:镭神N10-
电池:格氏 4S 2300MAH-
接收机:乐迪R9DS-
遥控器:乐迪AT9PRO-
配件:BB响一个,TYPEC连接线若干
配置流程
(1)飞控设置与试飞
使用QGC地面站下载px4 1.14版本固件,在飞控的SD卡根目录下创建/etc/extras.txt,写入:-
mavlink stream -d /dev/ttyACM0 -s ATTITUDE_QUATERNION -r 200-
mavlink stream -d /dev/ttyACM0 -s HIGHRES_IMU -r 200以提高IMU发布频率。-
修改机架类型为 Generic 250 Racer,代指250mm轴距机型。如果是其他尺寸的机架,请根据实际轴距选择机架类型
修改dshot_config为dshot600
修改CBRK_SUPPLY_CHK为894281 执行这步跳过了电源检查,因此左侧栏的电池设置部分就算是红的也没关系
修改CBRK_USB_CHK为197848
修改CBRK_IO_SAFETY为22027
修改SER_TEL1_BAUD为921600
修改SYS_USE_IO为0(搜索不到则不用管)
将飞行模式调节至自稳模式(因为此时飞机没有任何外部定位方法,只有自稳模式可以起飞,自稳模式飞行需要经验,保持飞行高度较低,测试能正常飞行就行)
RDK X3环境配置
realsense驱动安装:
安装librealsense SDK-
git clone -b v2.50.0 https://github.com/IntelRealSense/librealsense.git-
进入安装目录-
cd librealsense-
安装依赖
./scripts/setup_udev_rules.sh
mkdir build && cd build
cmake .. -DBUILD_EXAMPLES=true -DCMAKE_BUILD_TYPE=release -DFORCE_RSUSB_BACKEND=false && make -j$(($(nproc)-1)) && sudo make install
安装好后输入
realsense-viewer
我出现了这个问题,但我重启后解决此问题-
下载编译并安装realsense-ros 2.3.2-
必须要下载2.3.2版本-
创建工作空间-
记得安装catkin-tools
mkdir catkin_ws
cd catkin_ws
mkdir src
cd ..
catkin init
cd src
git clone -b 2.3.2 https://github.com/IntelRealSense/realsense-ros.git
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
catkin build --cmake-args -DCATKIN_ENABLE_TESTING=OFF -DCMAKE_BUILD_TYPE=Release
catkin config --install
catkin build
echo "source ~/realsense-ros_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
安装完成后,启动相机节点-
roslaunch realsense2_camera rs_camera.launch-
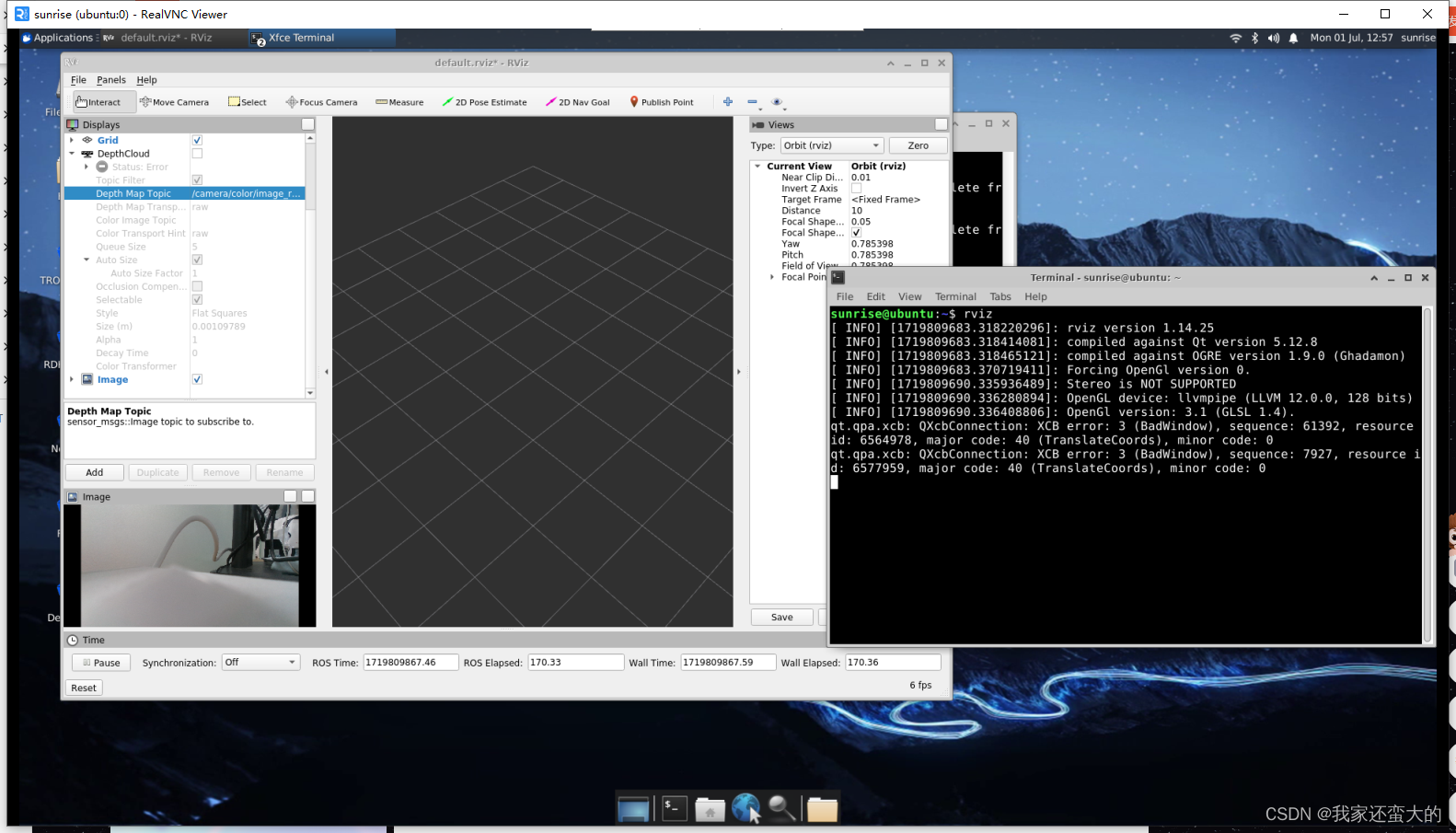
安装完成后可以看到摄像头信息(不建议在边缘设备上运行rviz,建议去配置一下ros多机环境)-
配置多机环境见我博客:-
https://blog.csdn.net/m0_57286362/article/details/140078915?spm=1001.2014.3001.5502-
下载ego-planner-
git clone https://github.com/ZJU-FAST-Lab/Fast-Drone-250.git
安装ceres与glog与ddyanmic-reconfigure-
解压3rd_party.zip压缩包-
进入glog文件夹打开终端
./autogen.sh && ./configure && make && sudo make install
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3.1.2 libgflags-dev libgoogle-glog-dev libgtest-dev
进入ceres文件夹打开终端
mkdir build
cd build
cmake ..
sudo make -j4
sudo make install
sudo apt-get install ros-noetic-ddynamic-reconfigure
依赖问题安装完后
cd Fast-Drone-250
先找到msg的包,使用catkin build pkg_name优先编译此包,最后再catkin build