本科阶段最后一次竞赛Vlog——2024年智能车大赛智慧医疗组准备全过程——5Webscoket节点的使用
有了前面几篇文章的铺垫,现在已经可以实现我到手测试那一步的
1.解读usb_websocket_display.launch.py
首先进入这个目录/root/dev_ws/src/origincar/origincar_bringup/launch/
打开usb_websocket_display.launch.py
下面是里面源码,唯一需要修改的地方就是这个红框,红框里含义就是dnn推理节点所加载的配置文件
当然你打开肯定和我的不一样,因为我修改过了,原始的我记得是fcos啥吧,接下来我将把这些东西给你
image-20240807205949236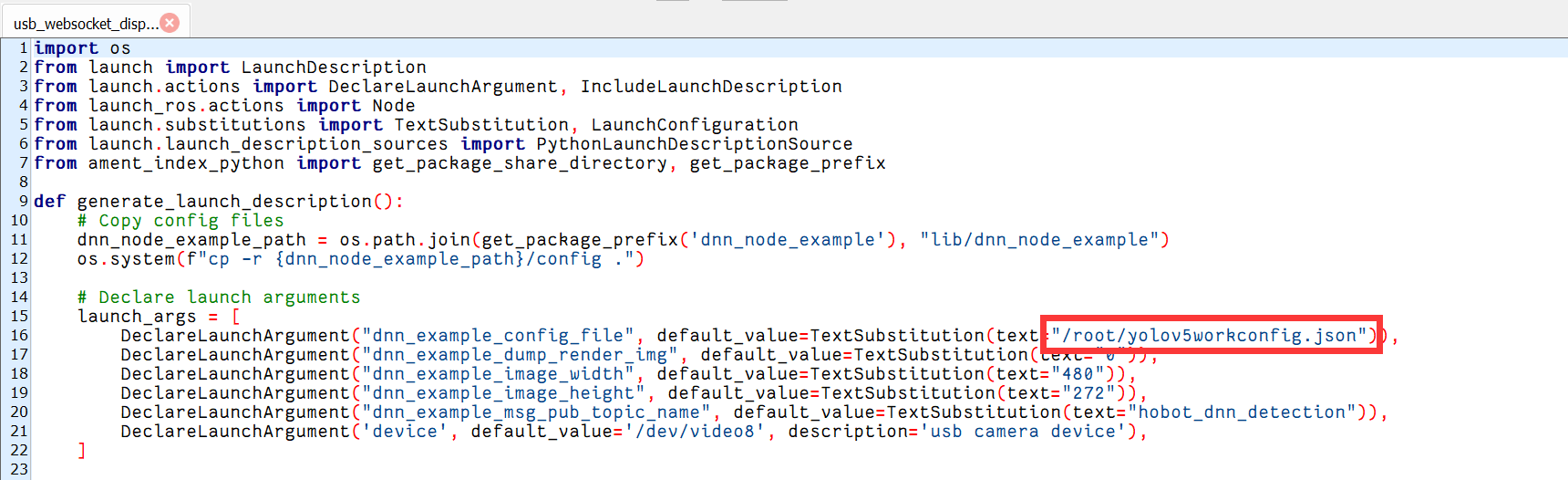
2.yolov5workconfig.json
现在你只需要,新建一个json文件,把我下面的放进去就行
注意model_file这里对应的是你模型所在的全路径,我建议用绝对路径反正不会错
注意class_num 是模型输出的label数量(整数类型)
{
"model_file": "/root/你的模型名字.bin",
"dnn_Parser": "yolov5",
"model_output_count": 3,
"class_num": 标签类别数,
"cls_names_list": "/root/obstacles.list",
"score_threshold": 0.65,
"nms_threshold": 0.6,
"nms_top_k": 2
}
3.obstacles.list
这个list其实就是画框的时候用的展示label名字
只需要根据你训练时候的id进行一次输入,每个之间进行换行
obstacles
第二个labelname
4.编译
经过上面的步骤WebScoket的配置文件已经修改完成了,把功能包编译一下
为了省事直接全部编译问题也不大
cd /dev_ws
colcon build
成果无误编译之后效果如图下
image-20240807211430025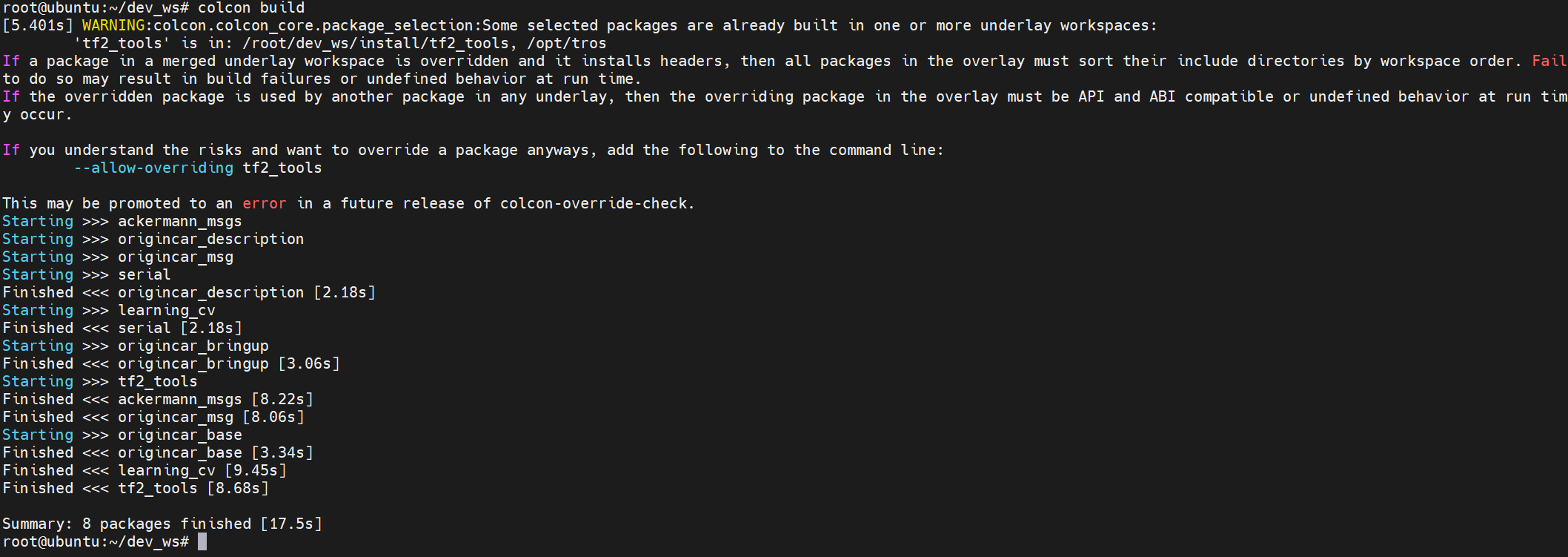
5.结果展示
执行如下命令:
ros2 launch origincar_bringup usb_websocket_display.launch.py
下面图里画红色框的应该就和你刚才修改的一样了
image-20240807211558218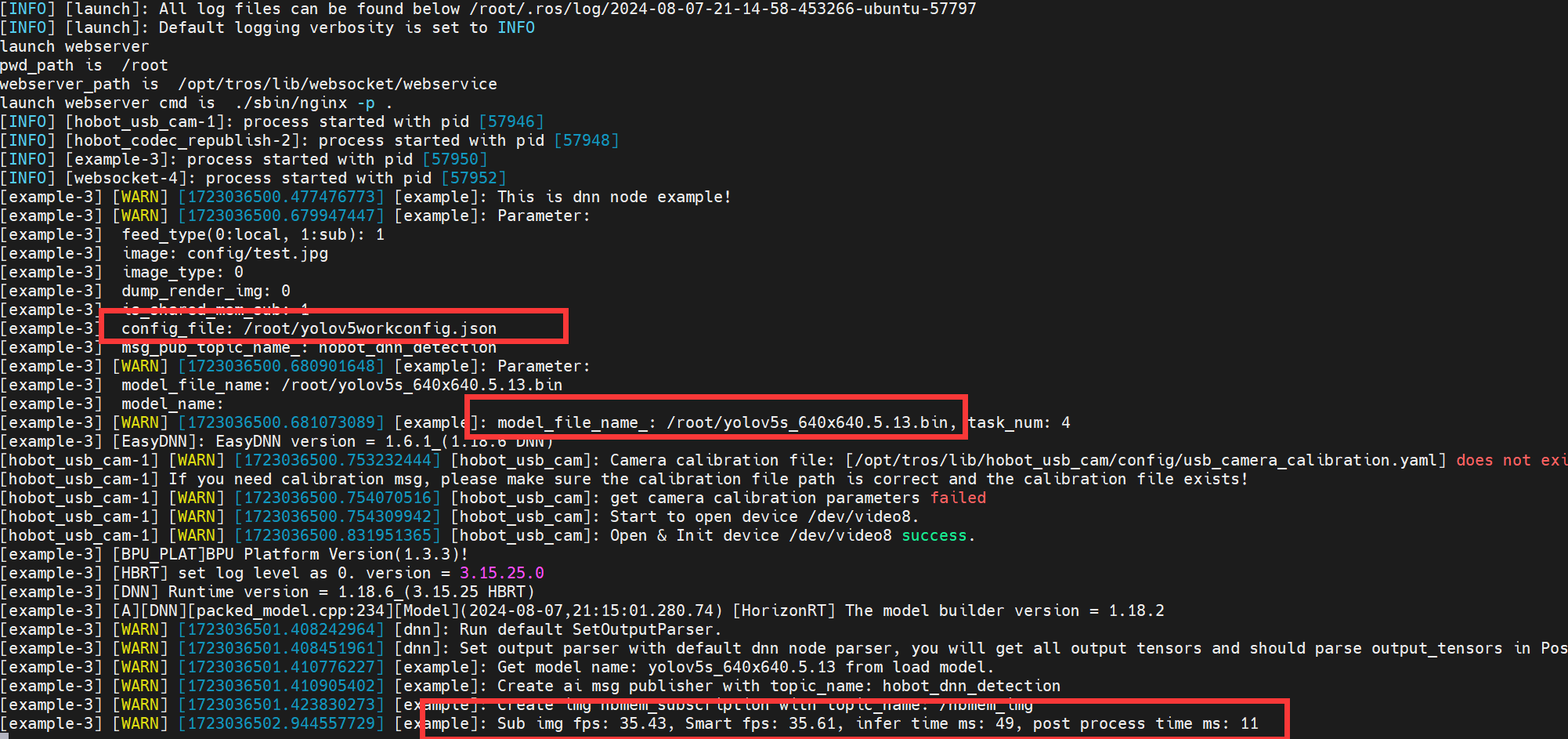
打开页面就可以看到效果如下:
image-20240807211737476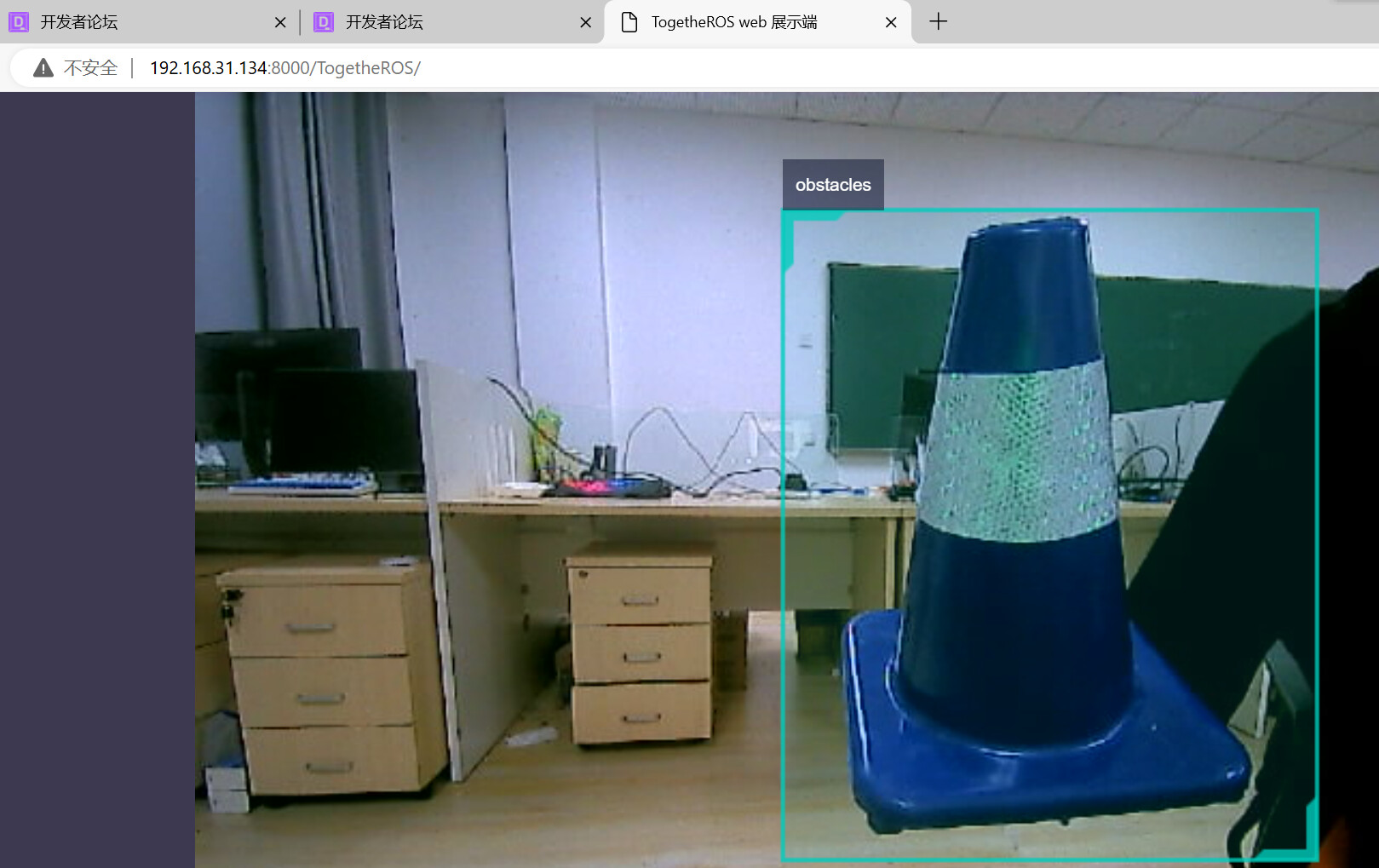
6.总结与下期预告
到目前为止,目标检测之Yolov5-2.0系列已经完结了,当然这里给大家介绍的这几期,其实只是一个上手使用
有关进一步的内容,后续我研究研究给大家带来详细的介绍
下一期将进行黑色引导线的相关介绍