地瓜机器人RDK X5初探-
一、硬件简介-
接口总览-
RDK X5提供了网口、USB、摄像头、LCD、HDMI、CANFD、40PIN等功能接口,开发板接口布局如下:
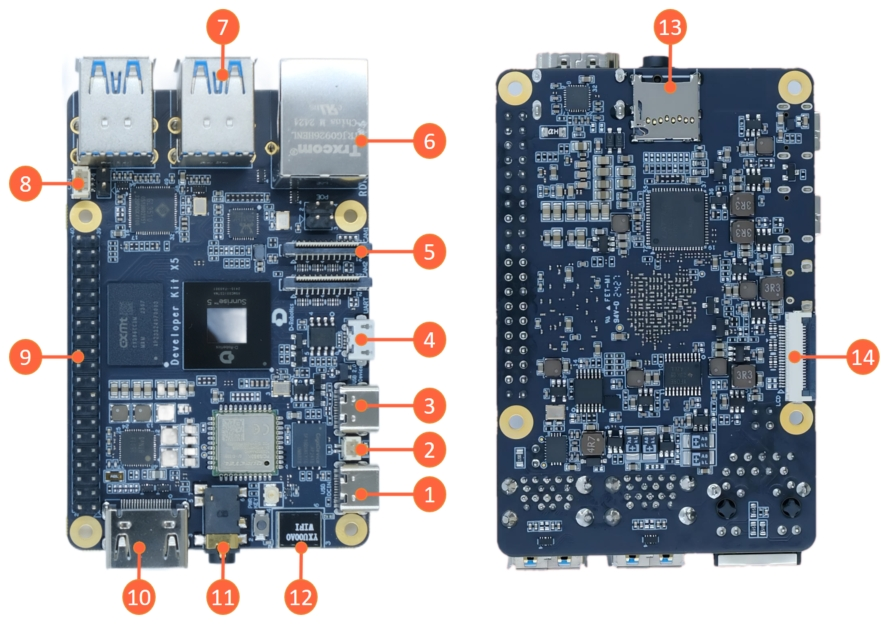

电源接口-
开发板提供一路 USB Type C 接口(接口1),作为供电接口,需要使用支持5V/5A的电源适配器为开发板供电。将电源适配器接入开发板后,开发板绿色电源指示灯和橙色指示灯亮起,说明开发板供电正常。-
调试串口-
开发板提供一路调试串口(接口4),以实现串口登录、调试功能。电脑串口工具的参数配置如下:-
波特率(Baud rate):115200-
数据位(Data bits):8-
奇偶校验(Parity):None-
停止位(Stop bits):1-
流控(Flow Control):无-
串口连接时,需要将通过 Micro-USB 线,连接开发板接口 4 与 PC。-
二、烧录系统-
这没什么药详细阐述的,按照官网提供的资料照着做就能成功,参考RDK X5系统烧录:-
https://developer.d-robotics.cc/rdk_doc/Quick_start/install_os/rdk_x5。-
三、系统配置-
1、串口登录-
使用MobaXterm工具,配置好串口,实现串口登录。-
用户名:root,密码:root’.-
2、连接wifi-
相比于树莓派3和4(Pi5没用过,不好评论),RDK X5连接wifi简直太方便了。官方介绍了两种方法,我个人喜欢下面这种:在命令行输入命令:-
sudo srpi-config
srpi-config是一个系统配置工具。打开后界面如下:-
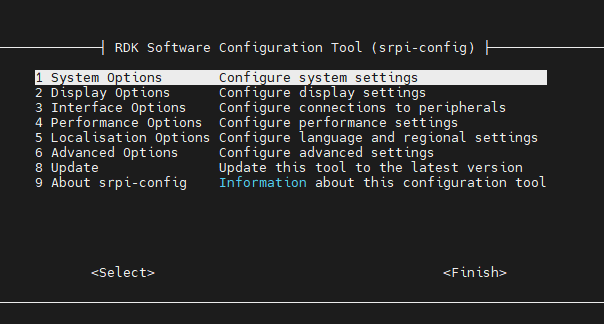
选择第一项“system options”-
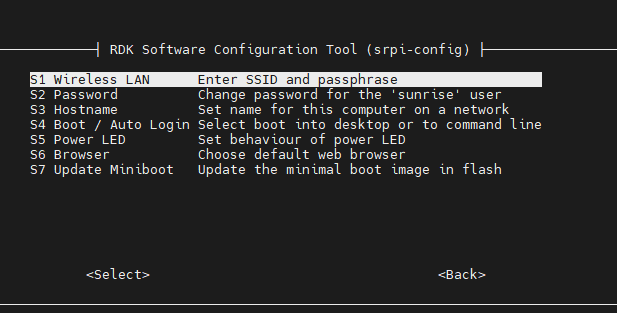
选择S1 wireless LAN,接下来就是先后输入wifi名称和密码。我个人习惯用手机连办公区域的WiFi,然后手机开热点,再把电脑和RDK X5板子都连到手机热点上,因为RDK X5板子有WiFi记忆功能,连上一次之后,即使是更换办公区域,只要是wifi名没变,也是可以自动连上wifi的,方便调试。-
3、开启其它功能-
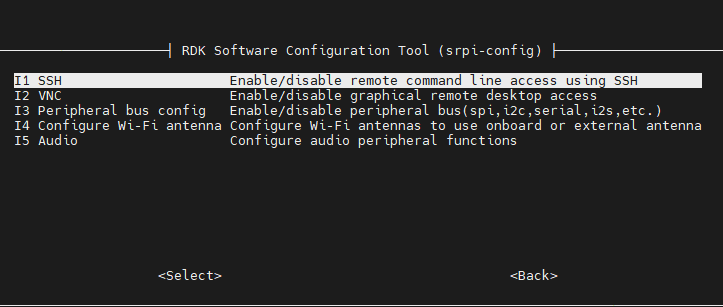
打开srpi-config系统配置工具,其中Interface Options是接口选项菜单,可启用/禁用以下功能:SSH、VNC、SPI、I2C、I2S、Serial 等。-
四、图像采集-
1、MIPI摄像头-
RDK X5板子上使用的摄像头是22针的MIPI摄像头,而我以前做树莓派用的-
全是15针的CSI摄像头。这就导致不能直接用,不过可以在网上买22pin转15pin转接线。-

按照官网教程,执行完发现一个问题:显示器上没有显示摄像头的画面。-
经过询问孵化器群里大佬,给出的解决方法是:可以执行命令行-
sudo systemctl stop lightdm.service-
但是停止程序后显示器会黑屏,可以执行-
sudo systemctl start lightdm.service-
使得显示器恢复正常。-
不过即使这页显示器上显示的分辨率并不是我所想要的,后续有时间再研究一下怎么修改。-
顺便提一下,官方搞活动送的一个配件是P5V04A SUNNY摄像模块。查了一下资料,如下:-
P5V04A SUNNY是一款摄像头模块,通常与树莓派/地瓜派配合使用。这款摄像头模块内置了OV5647传感器,具有5MP(500万像素)的分辨率,支持固定焦距,并且可以通过CSI接口与树莓派连接。它的尺寸为25mm x 24mm x 9mm,对角视场角为62°,并且支持高达90fps的VGA分辨率视频录制,以及1080P@30fps、720P@60fps和640×480@ 60/90fps的视频录制。-
此外,P5V04A SUNNY摄像头模块还支持红外滤光片,波长约为650±10nm,光圈为F2.4,并且镜头的畸变小于1%。-
在实际应用中,P5V04A SUNNY摄像头模块可以用于多种项目,如安防监控、人脸识别、图像处理等。例如,有文章介绍了如何使用树莓派4B和P5V04A SUNNY摄像头模块结合motion软件实现远程监控。此外,还有教程展示了如何使用这款摄像头模块采集人脸数据,用于本地人脸门禁系统的开发。-
2、USB摄像头-
参考官网教程,一切比较顺利,碰到显示器画面显示的问题和MIPI摄像头一样。-
五、试用ModelZoo-
ModelZoo相当于是一个大仓库,提供RDK系列开发板的各种模型样例。参考官网教程使用时需要安装bpu_infer_lib和jupyterlab,我这边遇到一个坑,安装完jupyterlab之后,报错:command not found。如下图所示-
![]()
解决方案:https://blog.csdn.net/qq_31290747/article/details/103253785?ops_request_misc=%257B%2522request%255Fid%2522%253A%252234EF7677-EC04-476F-B4BB-3062AB9D7586%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=34EF7677-EC04-476F-B4BB-3062AB9D7586&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~baidu_landing_v2~default-2-103253785-null-null.142^v100^pc_search_result_base5&utm_term=bash%3A%20jupyter%3A%20command%20not%20found&spm=1018.2226.3001.4187-
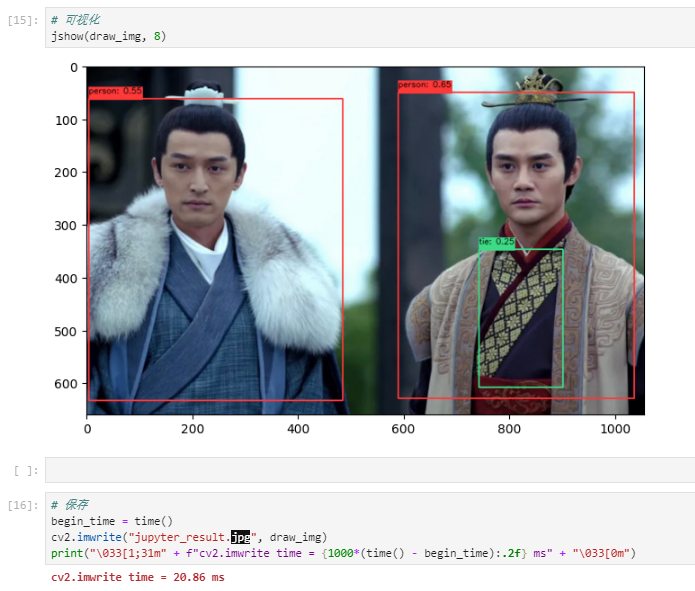
1、yoloworld测试-
接着上手了一个yoloworld的项目,我这里又出现错误提示,意思缺少某些库文件。-
切换到rdk_model_zoo目录下,执行-
pip install -r requirement.txt-
安装后所需库之后,允许程序没问题,效果如下:-
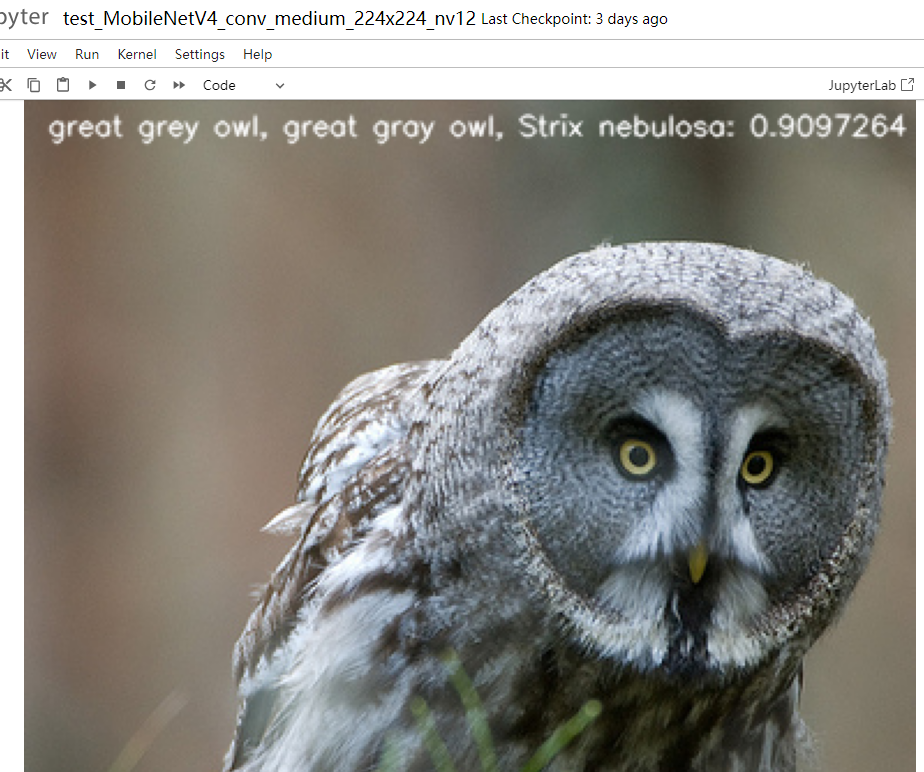
2、图像分类MobileNetV4测试-
图像分类测试了MobileNetV4模型中的conv_medium,效果如下:-
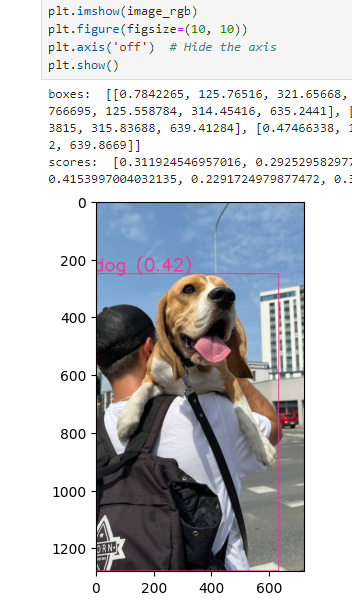
3、目标检测YOLOv5测试-
目标检测试了一个YOLOv5的效果,很流畅,如下:-
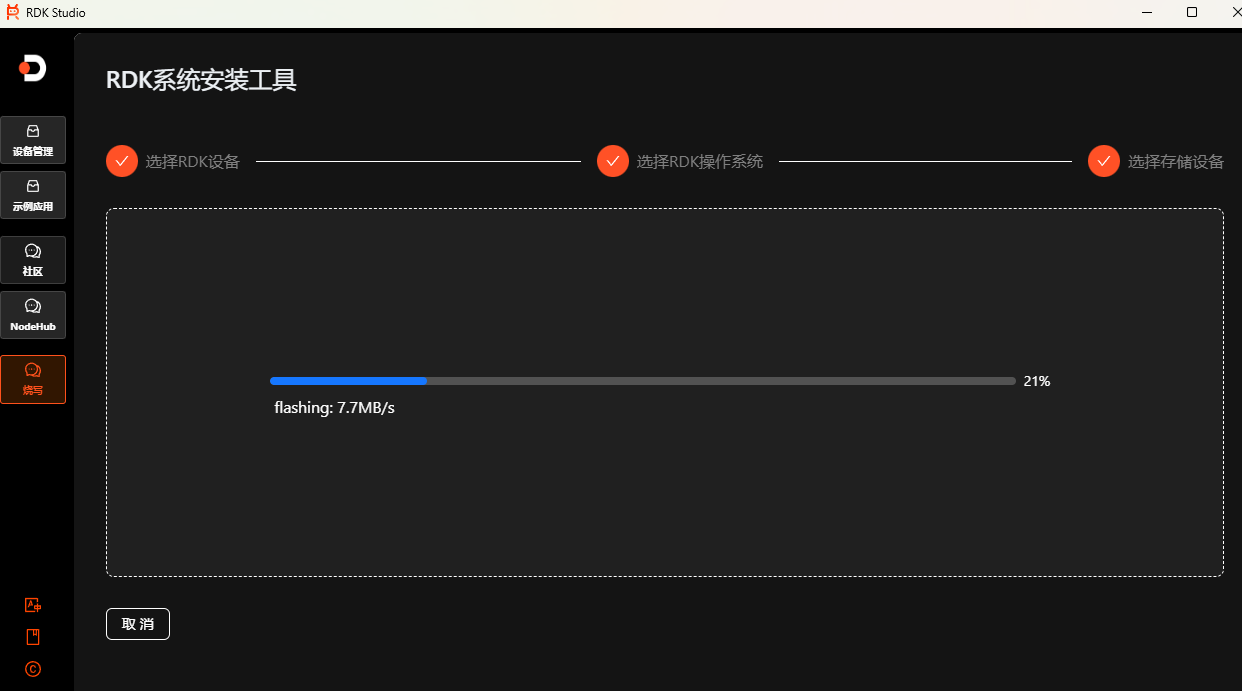
六、RDK Studio初探-
把RDK Studio下载下来,打开之后摸索了一阵之后,我只想对D-RObotics说,“有-
此神器,何愁大业不成!”这工具简直太棒了,我相信经过几代迭代之后,一定是会深受开发者喜爱。-
正好利用他的烧录功能烧了一块新的SD卡-
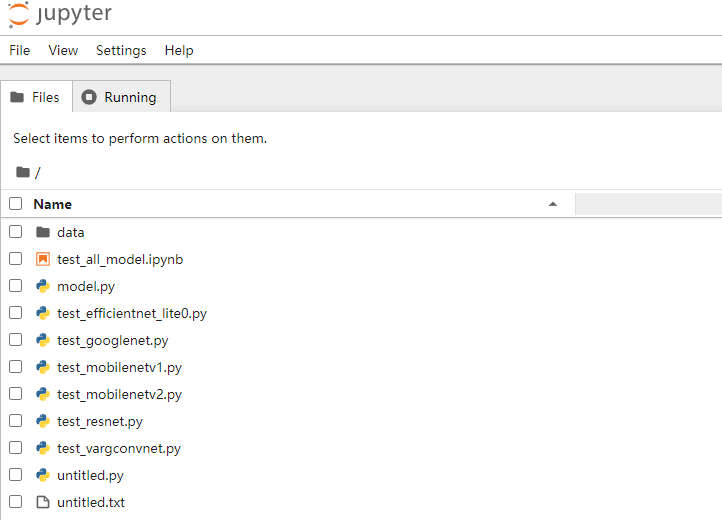
虽然官网推荐使用闪连,我个人还是喜欢通过wifi利用IP进行连接。但碰到了一个问题就是,当我使用用户名root进行连接时,在下面的界面下打不开Jupyter,
在示例应用里面可以打开Jupyter,打缺不能显示完整的目录,显示如下-
而使用用户名sunrise进行连接时,一切正常,Jupyter无论是在设备管理页面还是在示例应用页面都能正常打开,如下,可以看到其他的目录。不知道是何原因。-
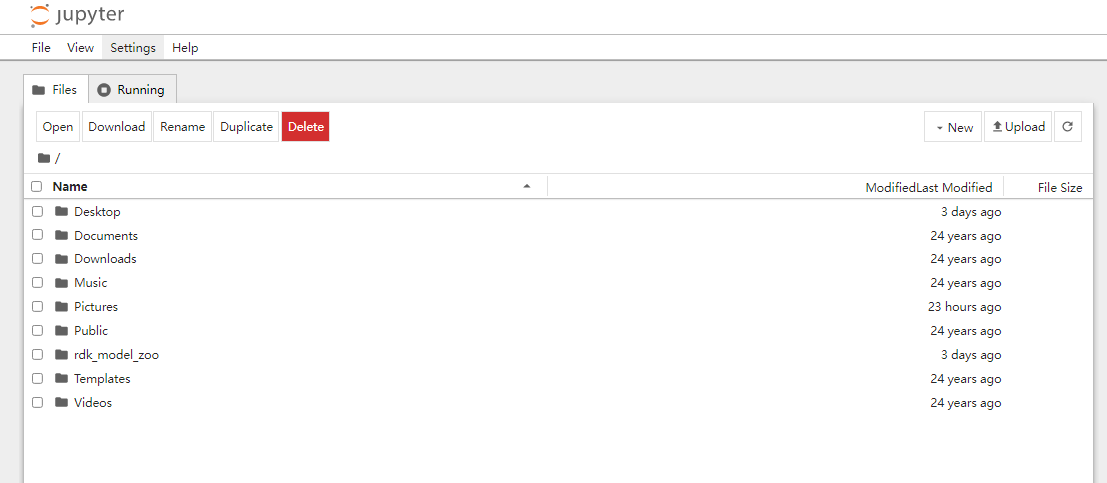
此外,还有一点需要注意,用户root和sunrise的文件是不互通的,相当于是两个磁盘一样。在使用串口和RDK Studio需要注意保持登录的用户一致。-
当然目前RDK Studio还处于初期版本,感觉有些功能还不是很完善,比如设备管理页面可以检测有无USB摄像头,希望可以多一些其他检测,比如有无mipi摄像头,音响设备等等。也可以增加一个子页面“图像处理工具”,可以把一些常见的图像处理工具集合在里面,方面做视觉处理时使用。-
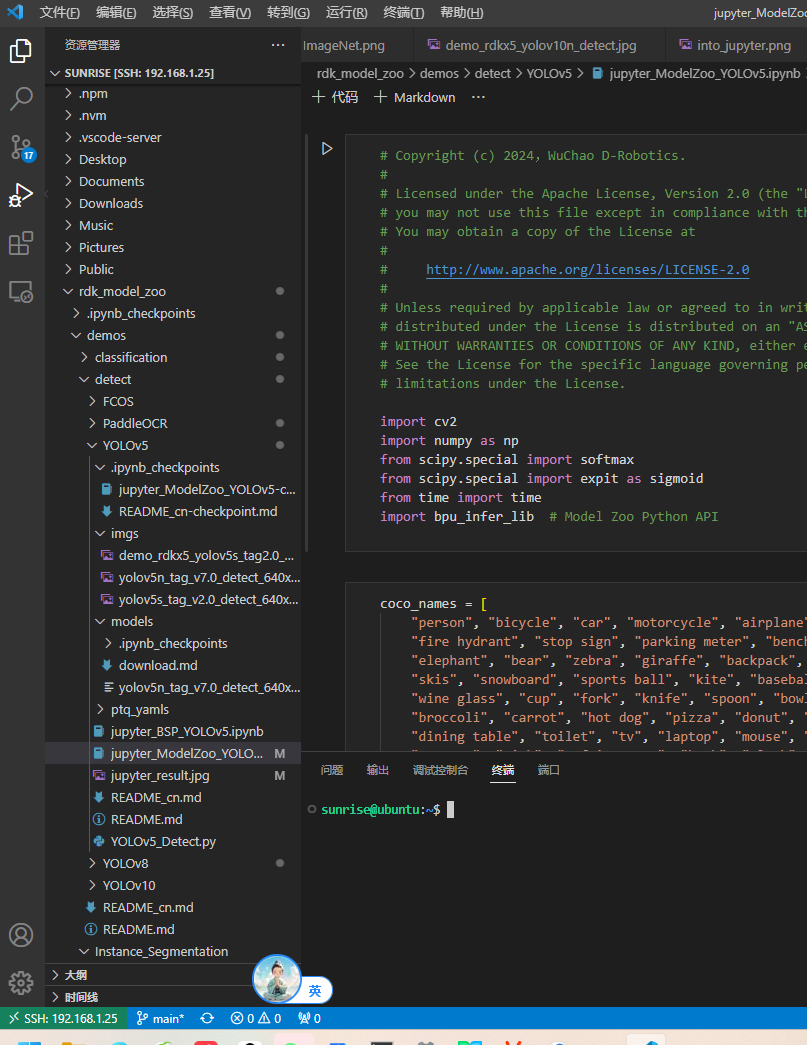
在使用RDK Studio时也使用了利用VSCODE的SSH功能连接板子,具体可参考连接,效果如下,-
七、NodeHub的使用-
NodeHub绝对是一个好东西,看介绍里面需要用到TogetheROS.Bot,官网介绍TogetheROS.Bot是D-Robotics面向机器人厂商和生态开发者推出的机器人操作系统,旨在释放机器人场景的智能潜能,助力生态开发者和商业客户能够高效、便捷的进行机器人开发,打造具有竞争力的智能机器人产品。-
但可惜我这里在调试YOLOv8目标识别的时候,提示我的SD卡空间不够了,很多对面没法升级进行了,我用的是16G卡的,看来得至少买一个32G的卡拿来使用。-
下次再探究吧。