国庆前一天(9.30号)收到了地瓜开发板RDK X5,买的8G版本,最近一直忙于工作,终于可以借着官方文档好好折腾一下了
RDK官方文档超全面,可以说有手就行,附上链接:D-Robotics RDK套件 | RDK DOC
配套的RDK X5的开发板硬件相关介绍地址:1.1.2 RDK X5 | RDK DOC
先两张效果图:


硬件环境:

强烈建议大家使用官方问的那个进行开发,官方写的真的很细,可以看到,是在手把手,用心教我们这样的初学者了,哈哈哈!
好马配好鞍、关于新手上路的指引:
RDKX5官方工具下载:资源中心
RDKX5官方推荐配件:配件页
同时、也借着着官方文档、开始正式折腾(学习)之路
step1:系统镜像少烧录
烧录之路一波三折,最后还是老老实实按照官方教程走通,
注意:
1、系统安装包下载之后先解压。解压之后用官方的教程:1.2.2 RDK X5 | RDK DOC 成功烧录
2、一开始刚开机质量绿灯、需要等一段时间,先等一会儿、如果没进系统、先重启试试,再不行,建议安官方教程使用串口工具看日志一个个解决
3、电源注意要好点,我使用15V(5V3A),板子正常情况是绿灯、棕色灯同时亮,才算是正常进入系统
4、小白前期可以使用desktop版本,有UI界面,方便快速熟悉系统,但后面真正开始、是必须使用sever版本,所以Linux命令行,该熟悉的、该学的,跑不掉
贴心附上官方开发文档的Linux指令大全:apt | RDK DOC
利用上自己的显示器,最终可算是顺利通电,成功联网,哈哈哈
step2:使用串口查看日志
这里有使用这个软件进行远程调试(官方推荐);-
MobaXterm free Xserver and tabbed SSH client for Windows
如果看不懂英文,可以使用这个仓库的release版本:
Releases · RipplePiam/MobaXterm-Chinese-Simplified-
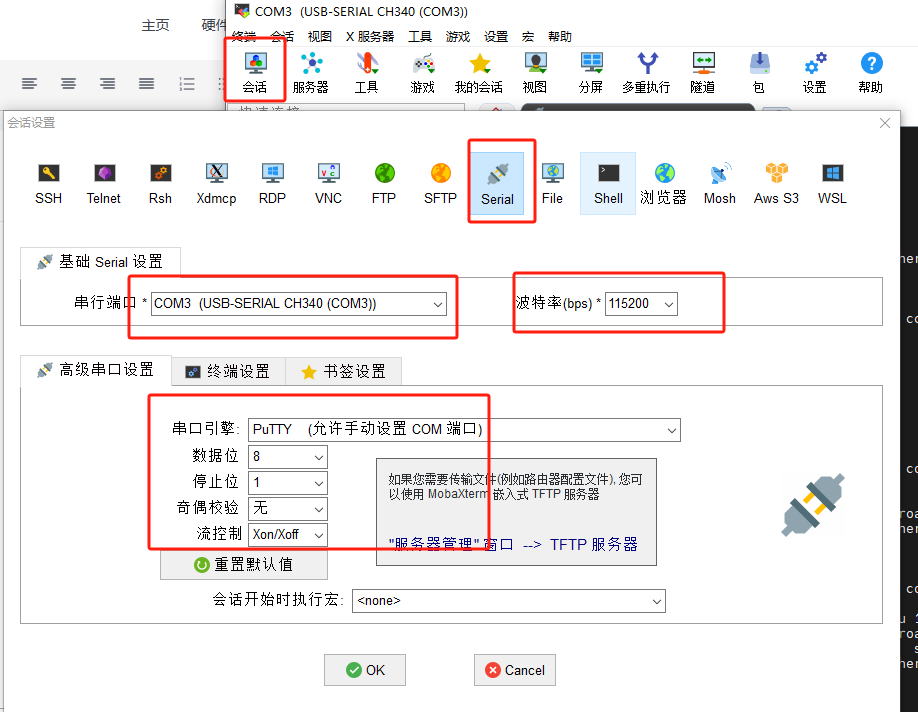
关于串口设置:-
1、你需要安装串口驱动-
参考这里:CH340串口驱动的官网下载链接地址(包含各大操作系统平台)_ch340驱动官方下载-CSDN博客
或者使用官方贴心的工具汇:资源中心
工具中找到:串口驱动
下载安装就OK,如下图,安装好即可

2、安装好上述MobaXterm软件后,使用串口线链接板子-电脑,需要注意,设备管理器需要检测出com口,MobaXterm才能安装
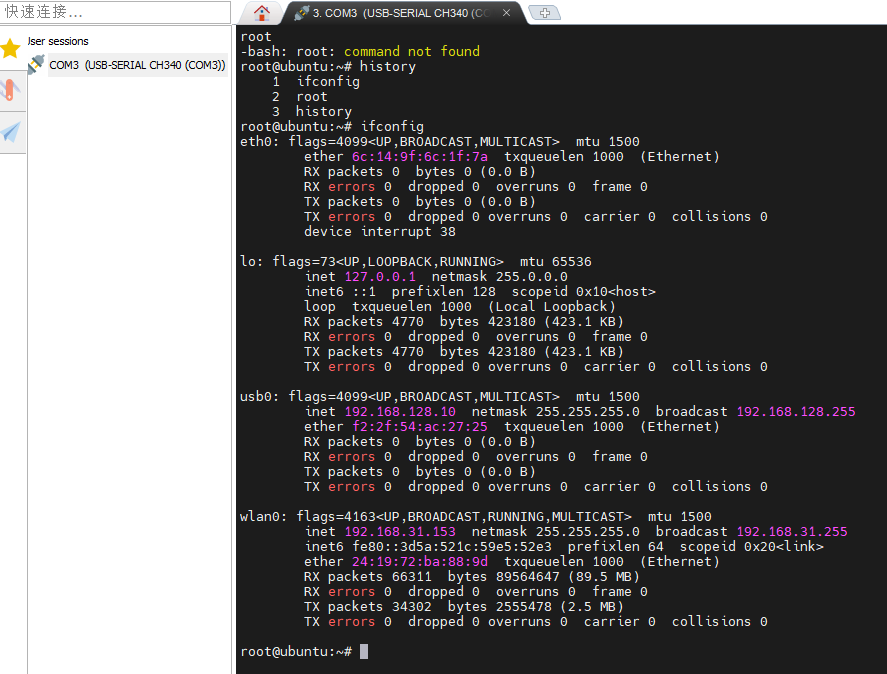
正常的链接成功后:可使用ifconfig命令查询开发板IP地址,其中eth0、wlan0分别代表有线、无线网络-
step3:远程登录
建议参考官方文档:1.4 远程登录 | RDK DOC
这里不再赘述,或者你也可以看下这篇站内好文:RDK-X5 上手 + 远程工作环境搭建——整成我想要的样子!
感谢论坛佬友的分享,真的很细了,这里因为要赶时间,就直接放链接了,哈哈哈哈,后续有新更新一集个人有更细化的开发需求,再在此贴下持续更新。
step4:调通相机
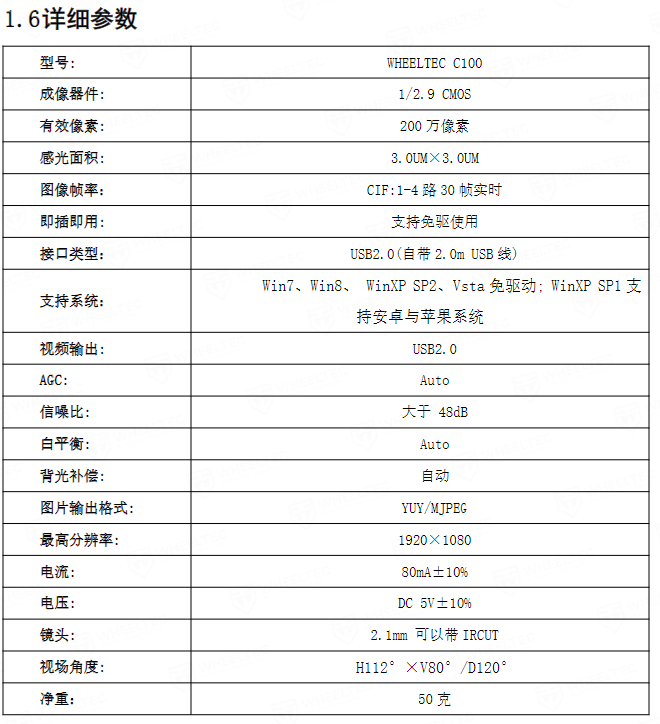
这里使用以下相机(再买官方推荐的散热背夹,顺手一起购买的WHEELTECC100相机)它长这个样子-
这款相机直接免驱,安装即可使用

以下是相机参数
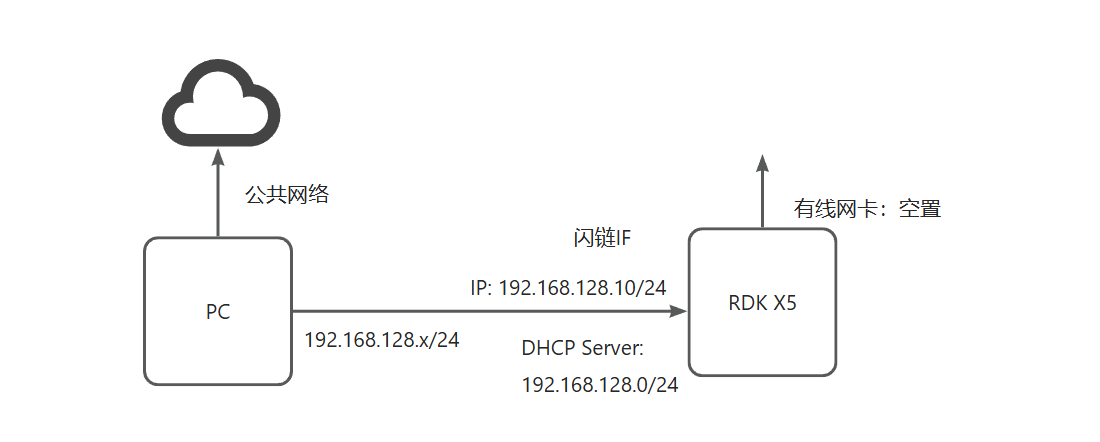
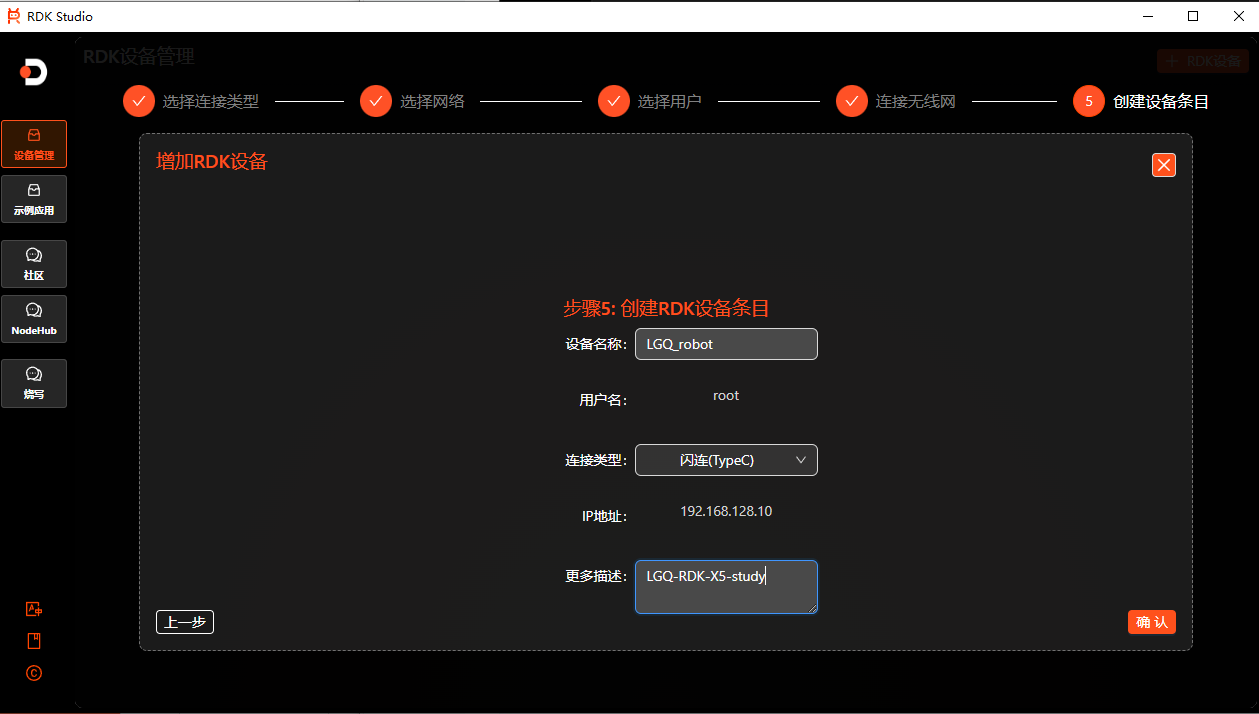
step5:使用闪连,用RDK Studio开发
参考教程:古月居 - ROS机器人知识分享社区
官方RDK Studio安装包下载地址:RDK Studio
安装好后,启动使用type-C线材链接RDK-X5板子和PC,网管信息图,可参考下图:
安装后,配置

连接后是试用Node-RED作手势识别(Node-RED支持浏览器打开,好评!)
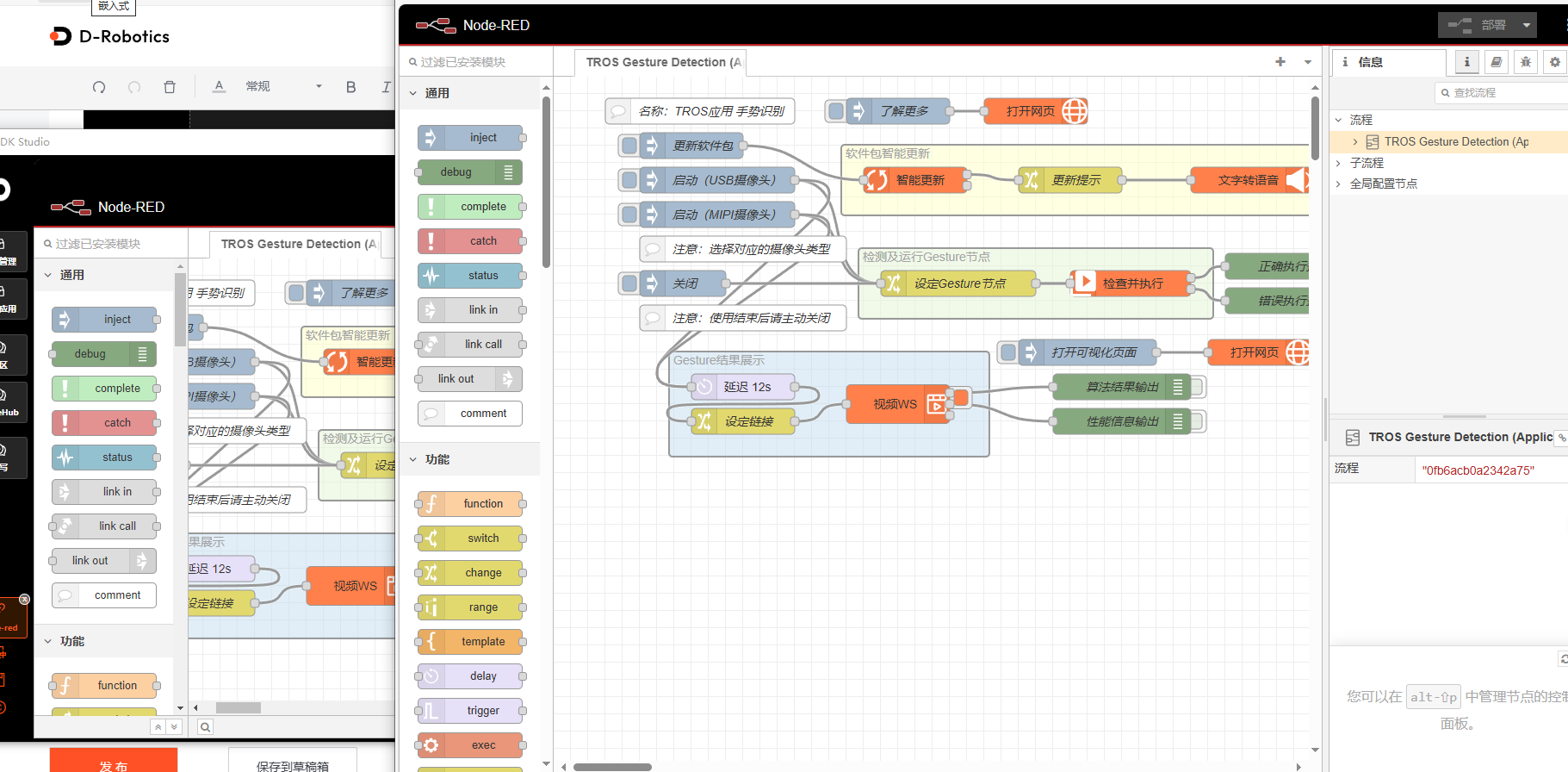
这里使用YOLO实现视觉
参考官方文档:YOLO | RDK DOC
因为没跑通,明天补效果图;
总结:
1、软件都很方便,对小白友好、但文档也很细,单有些步骤比较抽象(也许是大佬得思维就是很跳跃)
2、硬件以及配套生态很棒,期待后续官方组织更好的教程,同时文档也补上(因为现在很全了,单有些细节还是需要开发者主动去了解,有点麻烦,有点试错和学习成本)
3、论坛的编辑器和图片布局不怎么好用,排版有点生硬,期待后续官方做更新优化,开发者好用同时有好的阅读体验才会愿意沉淀,不然都写在本地,不分享,是和官方愿景相悖的(苦笑.jpg)
4、不得不说,RDK-X5的板子用料和散热背夹,是真的帅
后续计划:
- 先熟悉RDK-X5板子,认识清楚板子性能和官方demo算法和AI教程,
- 使用RDK-X5作灵巧手和视觉图像应用开发,正好自己在参与也在负责机器人灵巧手项目,后续会持续更新RDK-X5应用于智能灵巧手方向的教程
- 很想手搓一个《铁甲钢拳》,好馋智元机器人的机器人开发者套件(通用人形套餐-),后续打算购入一套,整合RDK-X5做一些有意思的项目
灵犀X1镇楼

有感兴趣欢迎组队一起交流,共同进步,一起变得更强!(灵犀已购入,后续会持续更新,后续打算使用X100尝试作机器人开发环境移植,将灵犀X1原有的微主机方案,替代为X100方案)