收到RDK X5 辣,开箱?
2024年10月的国庆假期,也迎来了使用地平线新一代X5芯片的地瓜派。
本次芯片更新让我感到惊喜的有如下几点:
- 此次升级将CPU从原来的x3 4核心处理器更换为8核心的A55处理器。这一改变不仅在核心数量上实现了翻倍,更重要的是采用了更先进的A55架构,使得整体性能得到了显著提升。
- NPU方面,计算性能从
x3的5TOPS升级到了10TOPS,AI性能在500元价位遥遥领先其他一众开发板(例如RK3588的8TOPS) - 外置IO上:增加到了2路的
Camera,4路的USB3.0 - 软件上,仍然沿袭了x3的convention,同时社区有丰富的资料和文档
- 生态上,RDK Studio以及NodeHUB带来了丰富的应用生态,能够快速启动demo,加速开发。
接下来放上几张RDK x5的开箱照片:
-
-

接下来,我们将对RDK X5的相关生态系统进行初步体验,希望能够深入了解RDK X5所提供的各项服务及其特色,包括但不限于软件开发套件(SDK)、硬件支持情况、开发者文档的质量与完整性、社区活跃度和支持力度等关键方面。此外,还将尝试构建一个简单的应用程序或者项目来测试其易用性和功能性,以此来评估RDK X5是否能够满足不同层次开发者的需求,并探索其在实际应用场景中的潜力。整个过程中,我们会记录下使用感受以及遇到的问题和解决方案,以便为其他对该平台感兴趣的朋友提供参考。
RDK Studio 初步体验
闪连体验
首先,在地瓜机器人官网的资源汇总页面下载RDK X5的系统镜像,使用rufus软件进行镜像的烧录。

在系统烧录到内存卡后,可以将电脑和RDK X5通过TypeC进行连接,此时RDK X5的闪联接口会模拟成为一张网卡,路由简图如下:
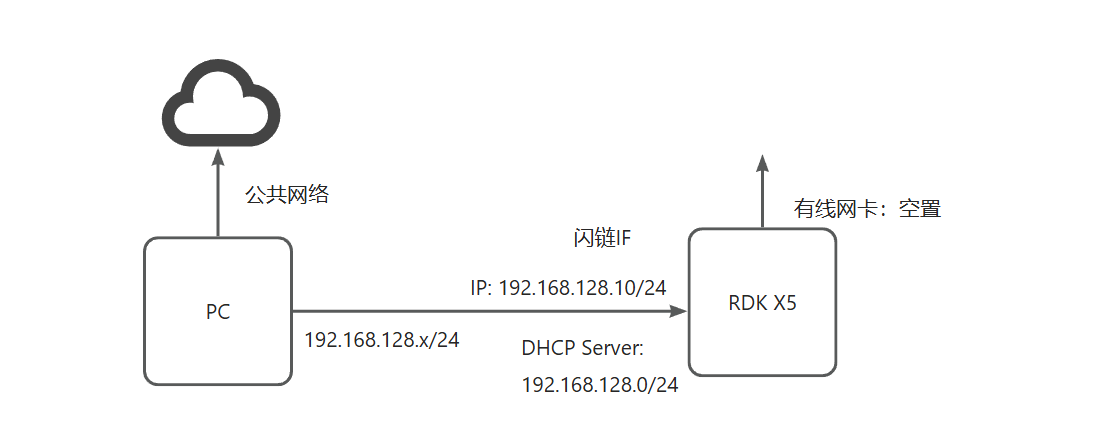
可以在终端里面尝试ping一下看看
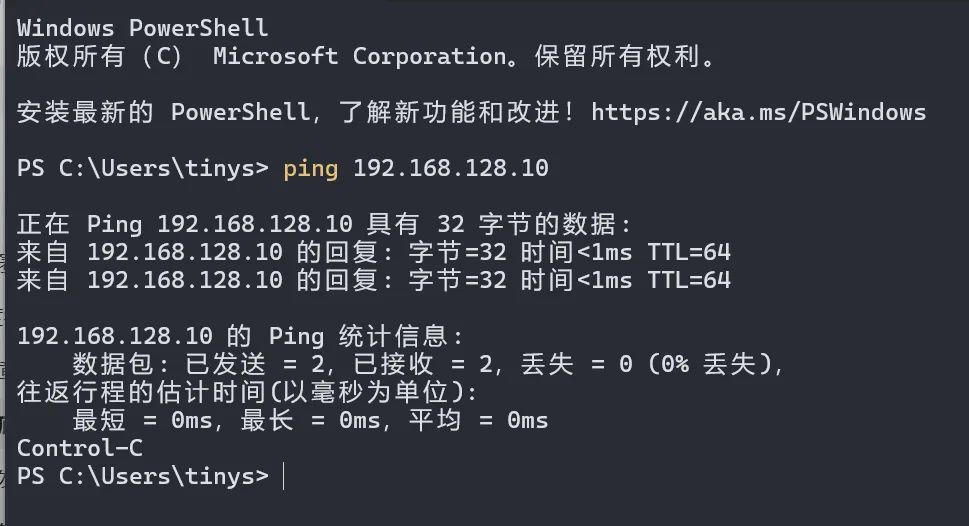
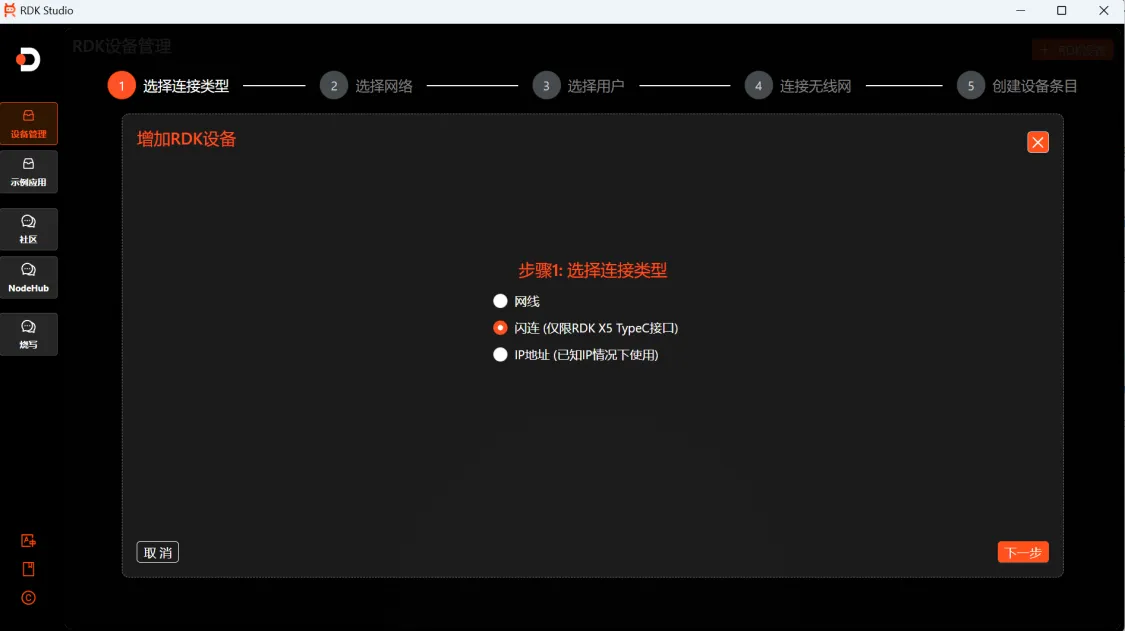
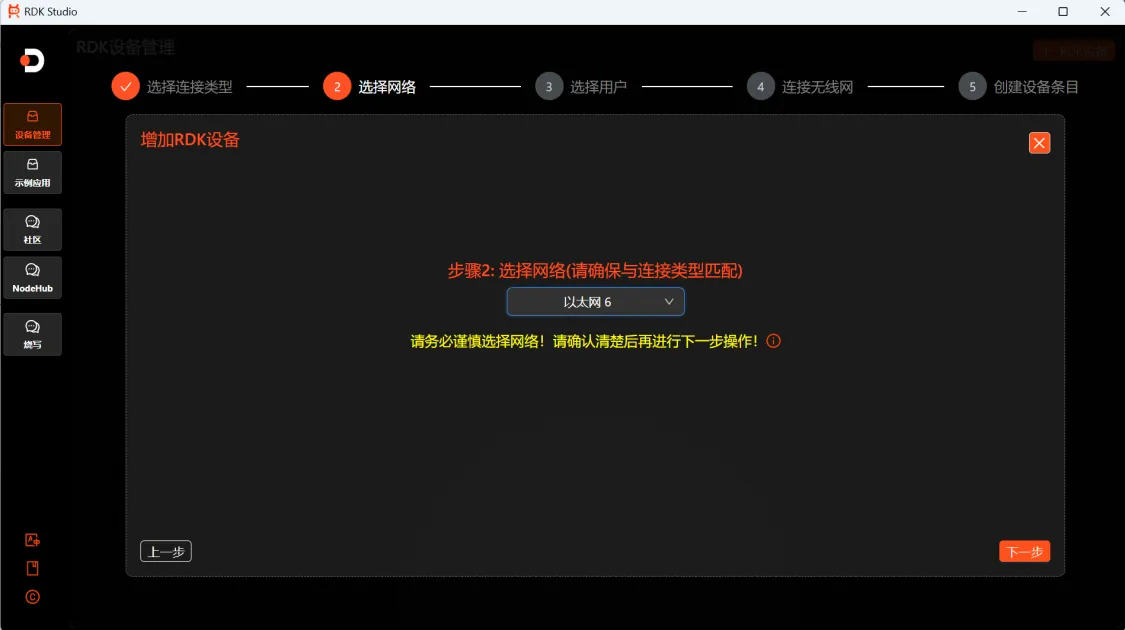
选择电脑多出来的以太网X(不过这步有点想吐槽了,明明电脑都能ping到X5了,为什么还要用户选接口啊??)
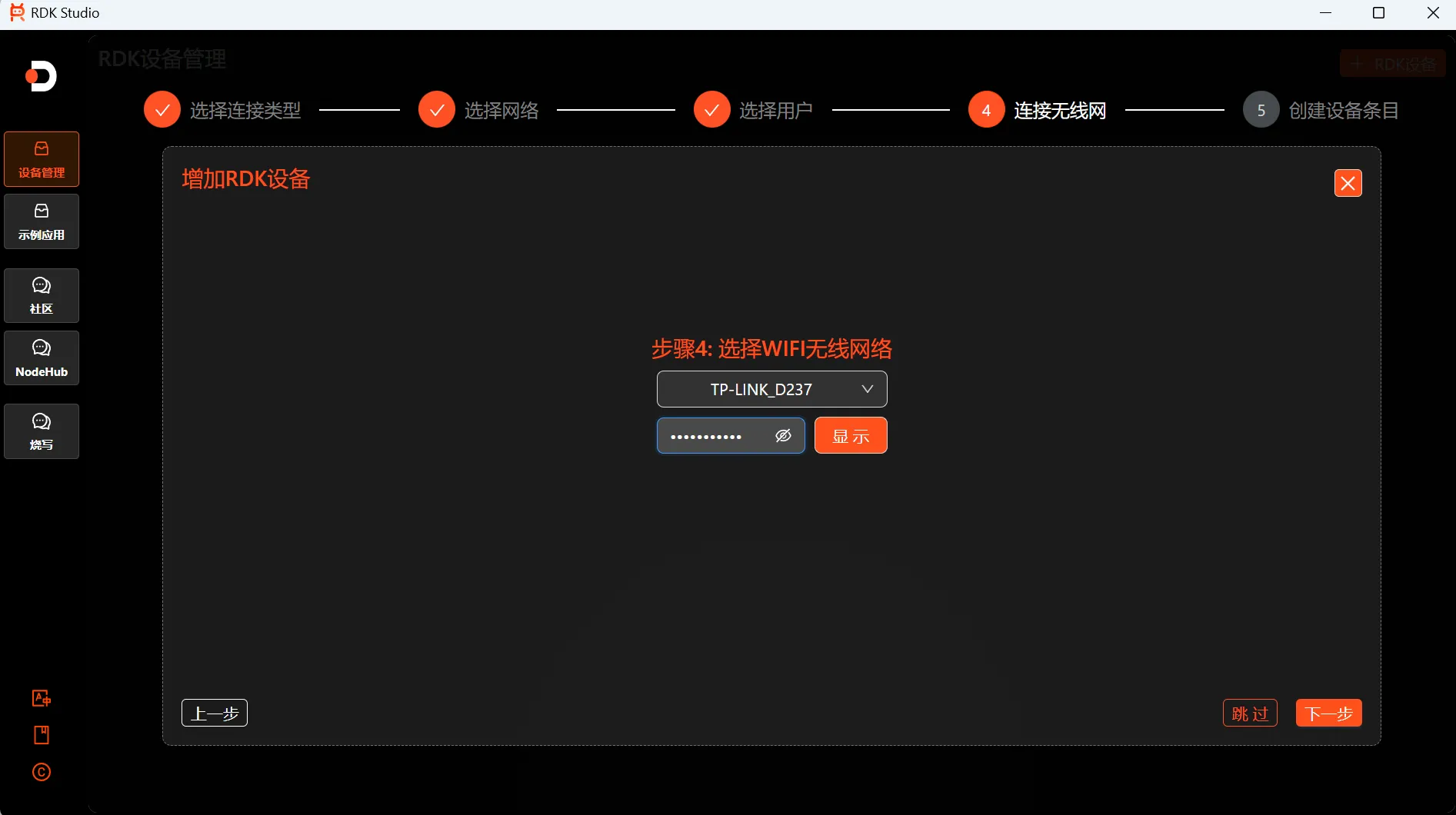
之后的网络配置很方便,自动配好无线网,好评!
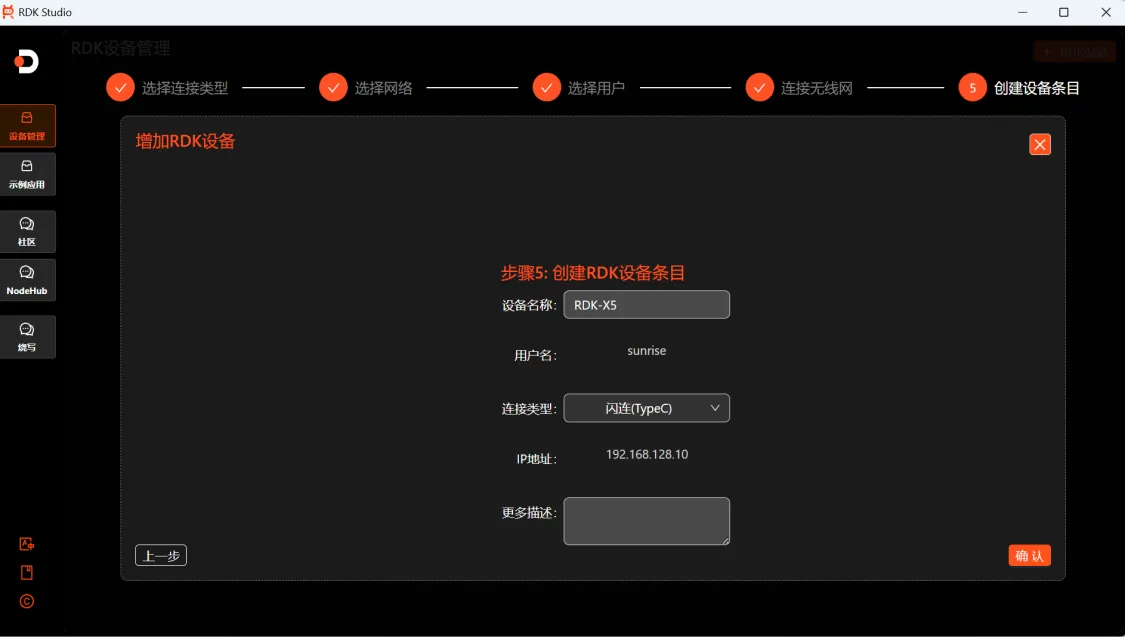
最后简单添加设备信息即可
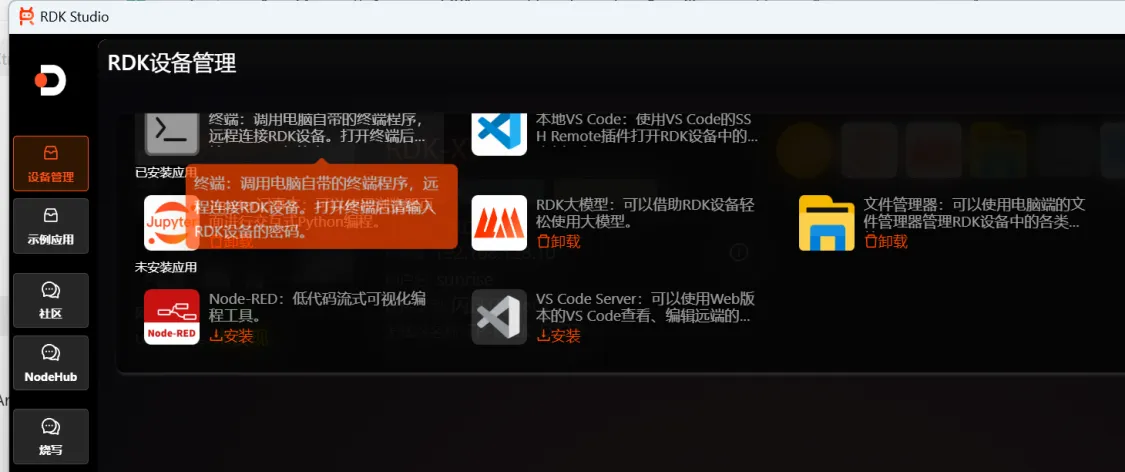
目前支持常用的终端,vscode,文件管理 ,以及第一方的大模型功能。
整个使用体验非常轻松,不需要显示器也能完成X5的初始化和配网,真的减少了很多麻烦!
VSCODE功能体验
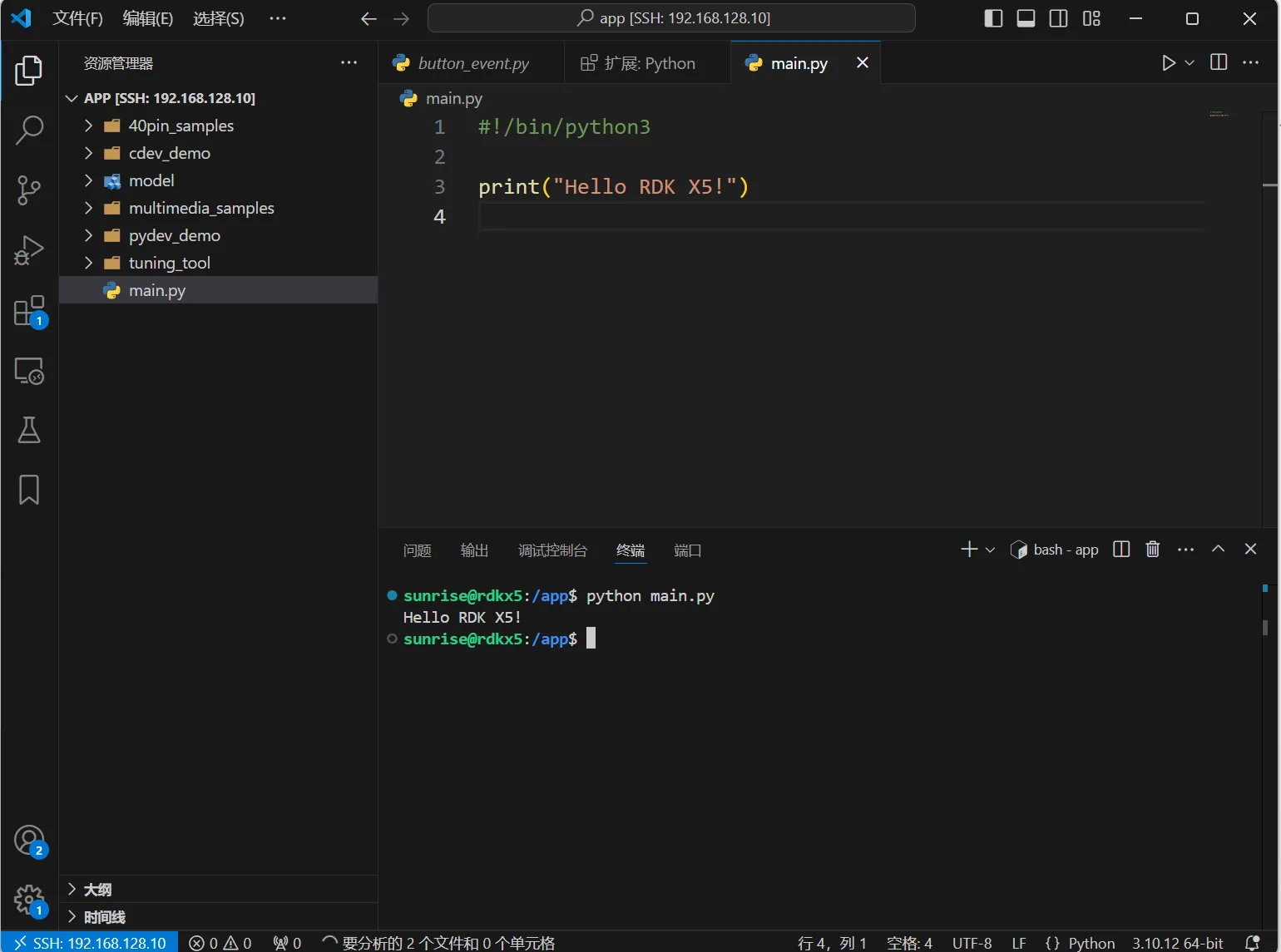
既然已经配好了vscode,那么接下来当然是Helloworld!
vscode点击启动
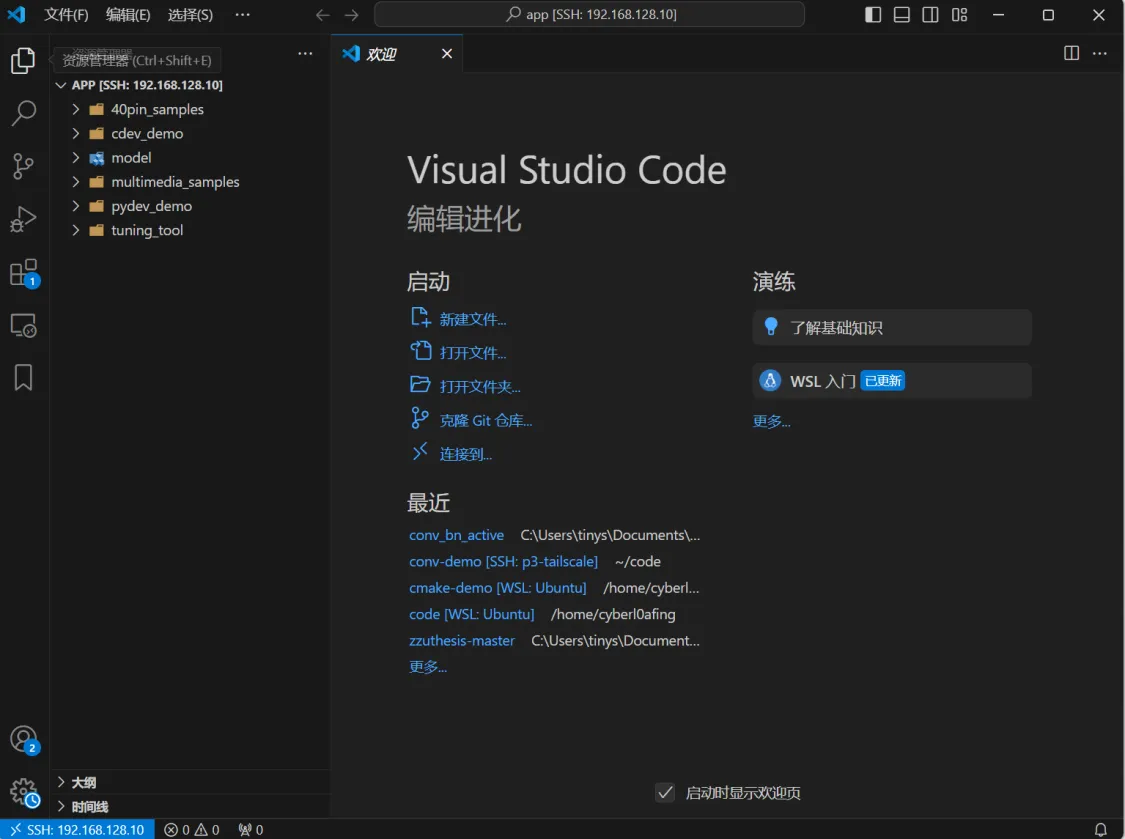
可以看到已经有多个demo可以供启动。自己新建一个文件来Helloworld…
Nodehub初体验
Nodehub是地瓜公司构建的综合应用生态系统中的一个关键组成部分,里面集成了各种常用的模型和应用实例,它的设计初衷是为了让用户能够享受到便捷、高效的应用体验。通过Nodehub平台,用户可以轻松访问到各种预配置好的应用程序和服务,无需经历复杂的安装或设置过程,真正实现了“开箱即用”的理念。
收
本次体验使用超哥?提供的Yolov8应用Nodehub实例.
Yolov8应用体验
到古月居小伙伴国庆后发来的摄像头配件礼物?,第一时间连接上了RDK X5

执行如下命令:
source /opt/tros/humble/setup.bash
export CAM_TYPE=mipi
ros2 launch dnn_node_example dnn_node_example.launch.py dnn_example_config_file:=config/yolov10workconfig.json dnn_example_image_width:=480 dnn_example_image_height:=272
浏览器访问:
192.168.128.10:8000
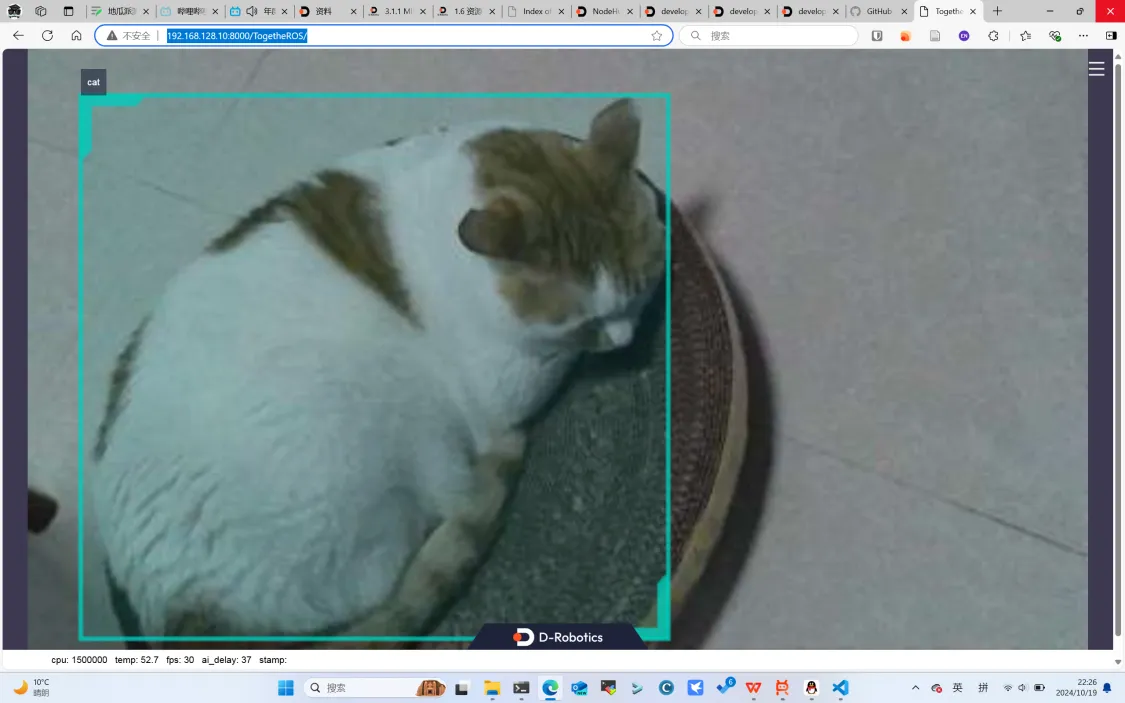
可以看到目标识别已经在正常运行了!只需要三行命令,还是非常简单的。
ModelZoo体验
项目地址:ModelZoo
克隆项目
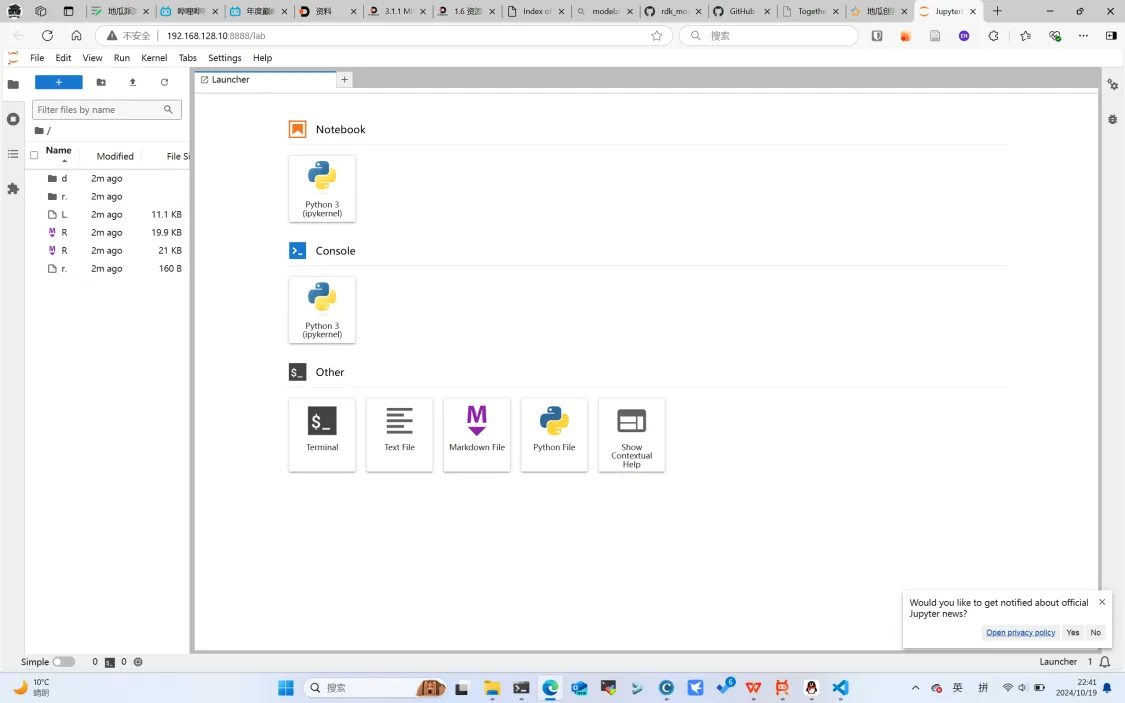
git clone https://github.com/D-Robotics/rdk_model_zoo && cd rdk_model_z
jupyter lab --allow-root --ip 192.168.128.10(仓库readme的ip有误)
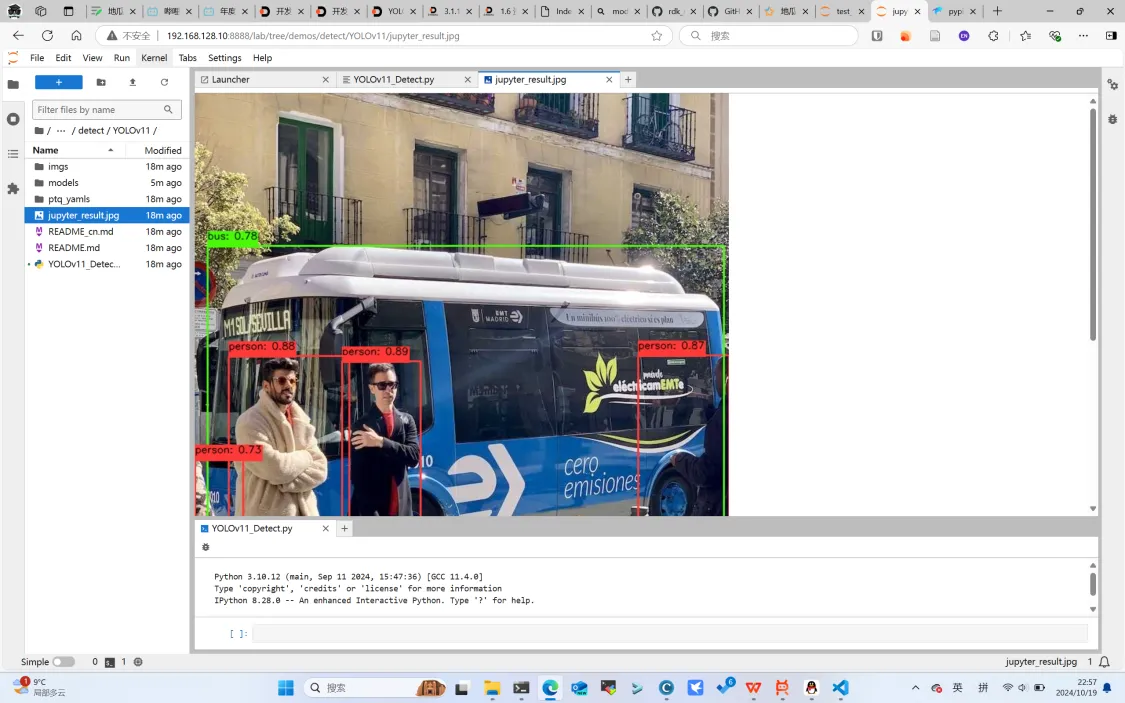
使用jupyter方式启动项目:-
启动了Yolov11相关项目:
建议
- 硬件发布时,及时跟进外壳等实用小配件,在工位这种空间不是很充裕的时候,每个外壳真的害怕乱七八糟的数据线把板子短路了or磕碰元件
- RDK Studio功能优化起来!初始化和链接板子看到很多群友还是有问题,可以提供更友好的方式和指引。同时可以在初始化时配置好密钥,后续可以免密登录。
- RDK Studio 支持软件数量还有点少。
- 文档方面还需要完善,有一些cli在x5上有错误还需要修正