本科阶段最后一次竞赛Vlog——2024年智能车大赛智慧医疗组准备全过程——12使用YOLO-Bin
根据前面内容,所有的子任务已经基本结束,接下来就是调用转化的bin模型进行最后的逻辑控制了
1 .YOLO的bin使用
对于yolo其实有个简单的办法,也不需要自己写代码进行推理
直接找到websocker的demo修改配置文件
image-20241216150709943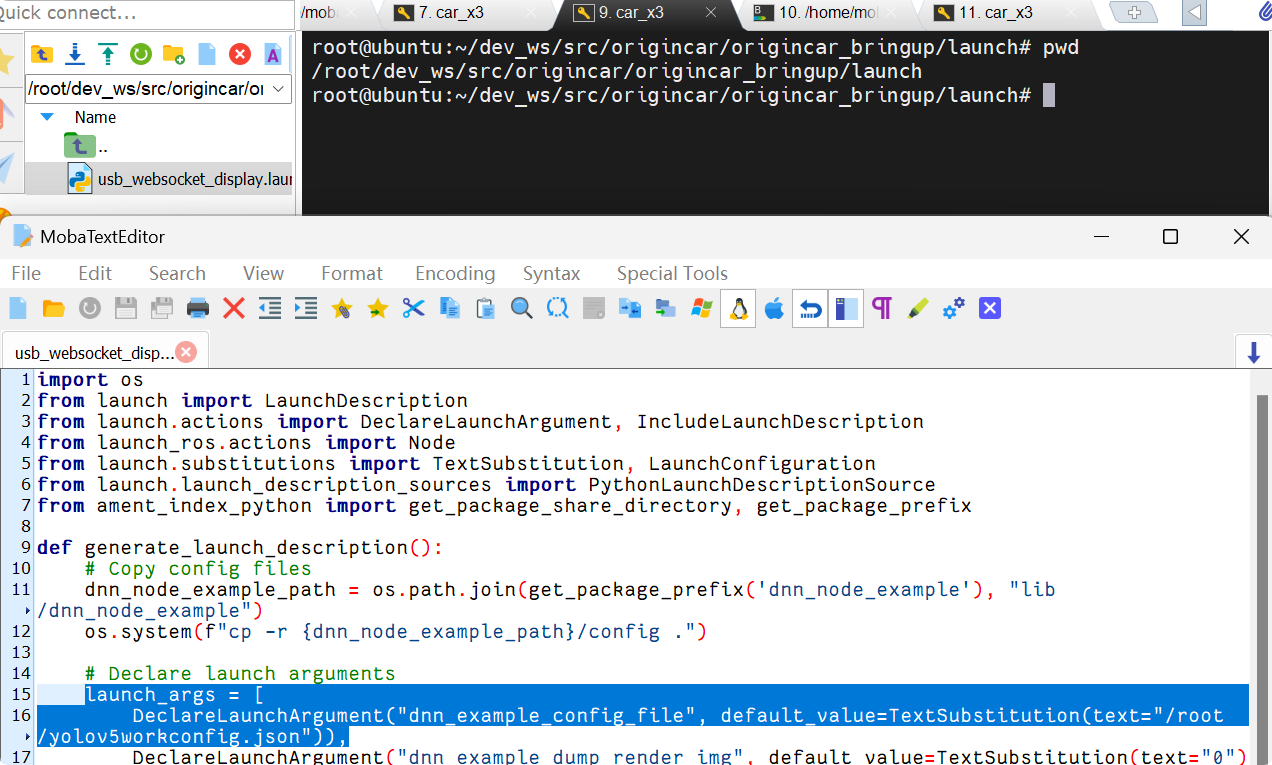
配置文件在手册其实也是作为一个demo进行演示,下面我把配置文件内容也给大家,大家就不需要去翻手册了
但是下面内容要根据你实际情况修改类别和类别list里面的label
{
"model_file": "/root/yolov5s_640x640.5.13.bin",
"dnn_Parser": "yolov5",
"model_output_count": 3,
"class_num": 1,
"cls_names_list": "/root/obstacles.list",
"score_threshold": 0.65,
"nms_threshold": 0.6,
"nms_top_k": 2
}
2.模型数据的接受
既然使用了websocket那么如何拿到标签信息,经过当时在论坛上找来找去,然后改了改这里给大家提供个demo
大家可以根据自己的需要把需要得内容进行发布出去
import rclpy
from rclpy.node import Node
from std_msgs.msg import Float64
import numpy as np
from ai_msgs.msg import PerceptionTargets
import threading
class YOffsetsMaxPublisher(Node):
def __init__(self):
super().__init__('y_offsets_max_publisher')
self.YoloV5Subscriber = self.create_subscription(
PerceptionTargets,
'hobot_dnn_detection',
self.YoloV5_listener_callback,
100)
self.data_store = {
"y_offsets_conf": 150, # 示例值,根据实际情况调整
"needzhuanwan": False
}
self.lock = threading.Lock()
def YoloV5_listener_callback(self, msg):
result_list = msg.targets
obj_len = len(result_list)
self.obj_x = np.full(8, -1) # 存坐标
self.obj_y = np.full(8, -1)
max_area = 0 # 用于存储最大面积
with self.lock:
for i in range(obj_len):
if not result_list[i].rois:
continue
for roi in result_list[i].rois:
box = roi.rect # 直接获取 roi 的 rect 属性
x_offset = box.x_offset
y_offset = box.y_offset
width = box.width
height = box.height
area = width * height
id = result_list[i].track_id
def main(args=None):
rclpy.init(args=args)
y_offsets_max_publisher = YOffsetsMaxPublisher()
rclpy.spin(y_offsets_max_publisher)
y_offsets_max_publisher.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
3.总结
目前对于yolo的使用已经结束,其实有需要大家可以使用cpp和py单独使用dnn模块进行推理也可以
这里给大家带来小白用法,更多的用法大家可以去地瓜手册进行查询api函数
下面给大家带来resnet使用