[RDK X5][编译报错]
orb-slam3源码已经编译通过了,但是pangolin不知道要怎么修改显示设置来适应这个板子的显示设置导致运行orb-slam3没有显示输出(已经在orb-slam3修改相应的代码为显示)/ ./Monocular/mono_euroc ../Vocabulary/ORBvoc.txt ./Monocular/EuRoC.yaml /home/sunrise/MH_01_easy ./Monocular/EuRoC_TimeStamps/MH01.txt num_seq = 1 Loading images for sequence 0…LOADED! ------- ORB-SLAM3 Copyright (C) 2017-2020 Carlos Campos, Richard Elvira, Juan J. G髆ez, Jos?M.M. Montiel and Juan D. Tard髎, University of Zaragoza. ORB-SLAM2 Copyright (C) 2014-2016 Ra鷏 Mur-Artal, Jos?M.M. Montiel and Juan D. Tard髎, University of Zaragoza. This program comes with ABSOLUTELY NO WARRANTY; This is free software, and you are welcome to redistribute it under certain conditions. See LICENSE.txt. Input sensor was set to: Monocular Loading settings from ./Monocular/EuRoC.yaml Camera1.k3 optional parameter does not exist… -Loaded camera 1 -Loaded image info -Loaded ORB settings Viewer.imageViewScale optional parameter does not exist… -Loaded viewer settings System.LoadAtlasFromFile optional parameter does not exist… System.SaveAtlasToFile optional parameter does not exist… -Loaded Atlas settings System.thFarPoints optional parameter does not exist… -Loaded misc parameters ---------------------------------- SLAM settings: -Camera 1 parameters (Pinhole): [ 458.65399169921875 457.29598999023438 367.21499633789062 248.375 ] -Camera 1 distortion parameters: [ -0.28340810537338257 0.073959067463874817 0.00019359000725671649 1.7618711353861727e-05 ] -Original image size: [ 752 , 480 ] -Current image size: [ 600 , 350 ] -Camera 1 parameters after resize: [ 365.94735717773438 333.44500732421875 292.99069213867188 181.10678100585938 ] -Sequence FPS: 20 -Features per image: 1000 -ORB scale factor: 1.2000000476837158 -ORB number of scales: 8 -Initial FAST threshold: 20 -Min FAST threshold: 7 Loading ORB Vocabulary. This could take a while… Vocabulary loaded! Initialization of Atlas from scratch Creation of new map with id: 0 Creation of new map with last KF id: 0 Seq. Name: There are 1 cameras in the atlas Camera 0 is pinhole First KF:0; Map init KF:0 New Map created with 508 points(直接结束了End of saving trajectory to CameraTrajectory.txt … Saving keyframe trajectory to KeyFrameTrajectory.txt … )
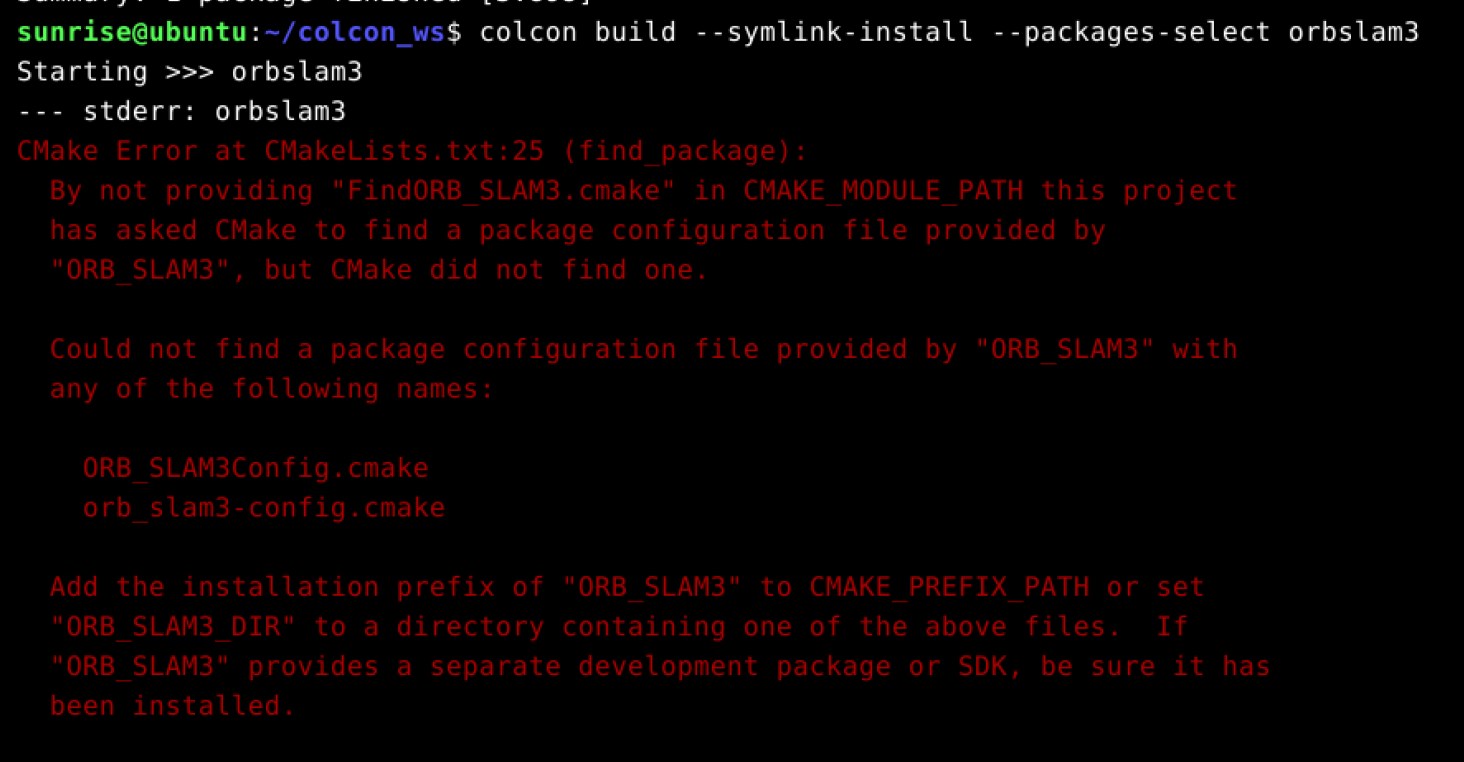
orb-slam3-ros2编译出现问题,已经在相应的cmake文件修改set内容为我的orb-slam3的路径
rdk的历程和我的相机不合适(奥比中光Gemini)还是需要自己弄
标题要求:标题需要包含基本的信息,以[问题分类][板卡类型][问题简述]的形式填写标题
当一个问题符合多个标签时,也可以提供多个标签
- [图像算法][RDK X5][编译报错]
- [语音算法][RDK X3][增加音频输入时长]
- [语音算法][TROS][大模型][RDK X3 Module][启动异常]
[问题分类]:[多媒体][图像算法][TROS][语音算法][强化学习][大模型][激光雷达][算法工具链][Linux开发][][RDK Studio][RDK Model Zoo][GitHub][… 其他 …]-
[板卡类型]:[RDK X3][RDK X3 Module][RDK X5][RDK X5 Module][RDK Ultra][RDK S100][… 其他 …]-
内容要求:rdkos_info信息必须提供,其他信息根据问题类别选择提供
- 在附件中,提供 sudo rdkos_info 命令返回的结果,保存为 rdkos_info_xxxx.txt,以附件的形式放在帖子下。
详细描述预期结果和程序运行表现,描述与预期不符的地方
参考:https://developer.d-robotics.cc/forumDetail/266442573995170050