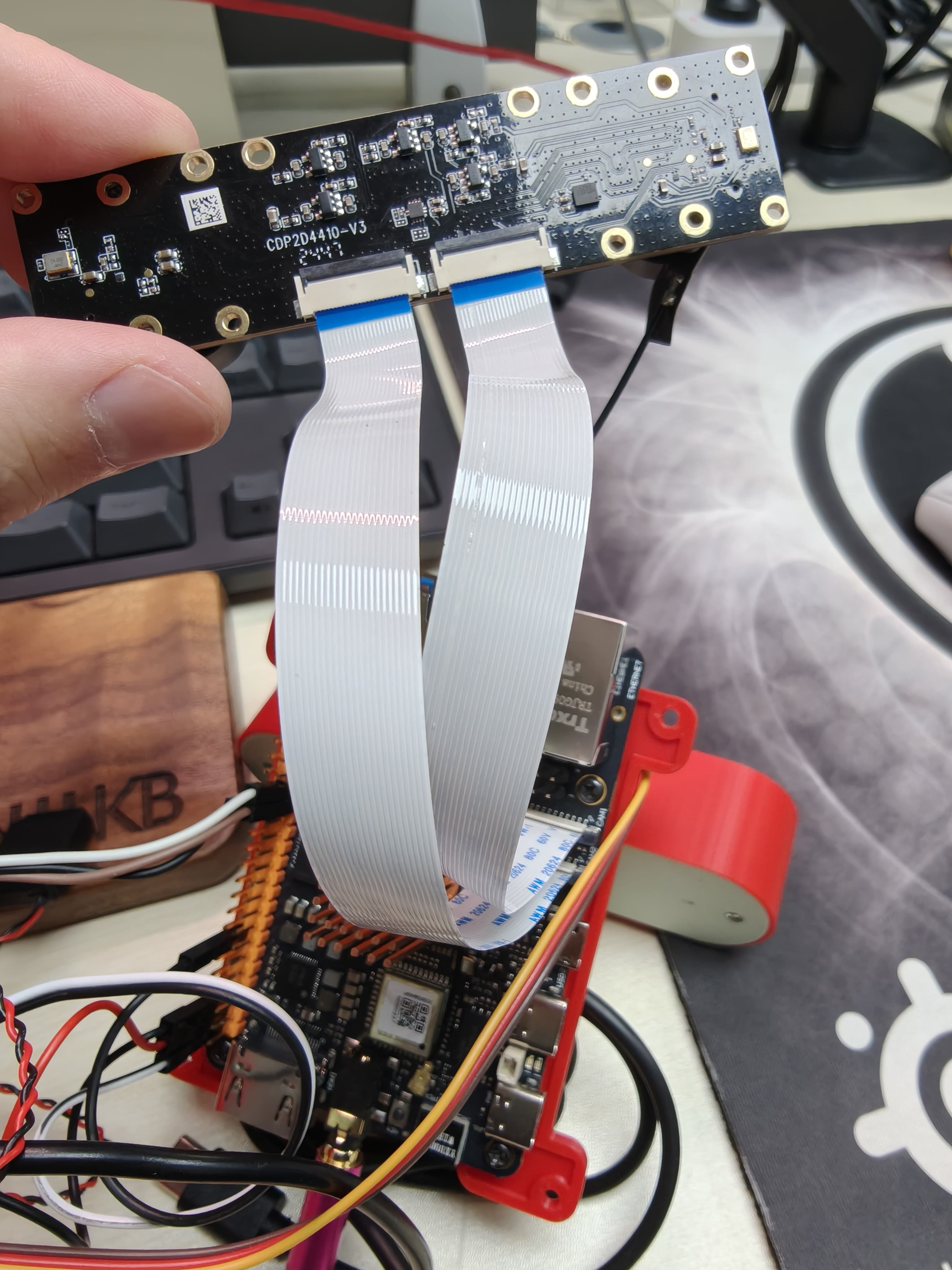
尝试运行ROS2双目示例代码错误
root@ubuntu:/app/pydev_demo/03_mipi_camera_sample# ros2 launch hobot_stereonet stereonet_model_web_visual_v2.launch.py \
need_rectify:=False mipi_image_width:=640 mipi_image_height:=352 \
height_min:=-10.0 height_max:=10.0 pc_max_depth:=5.0 \
save_image_all:=True save_freq:=4 save_dir:=./stereonet_result save_total:=10
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-04-10-18-53-19-994061-ubuntu-8423
[INFO] [launch]: Default logging verbosity is set to INFO
Hobot shm pkg enables zero-copy with fastrtps profiles file: /opt/tros/humble/lib/hobot_shm/config/shm_fastdds.xml
Hobot shm pkg sets RMW_FASTRTPS_USE_QOS_FROM_XML: 1
config_file_path is /opt/tros/humble/lib/mipi_cam/config/
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
launch webserver
pwd_path is /app/pydev_demo/03_mipi_camera_sample
webserver_path is /opt/tros/humble/lib/websocket/webservice
launch webserver cmd is ./sbin/nginx -p .
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
config_file_path is /opt/tros/humble/lib/mipi_cam/config/
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
webserver has launch
[INFO] [mipi_cam-1]: process started with pid [8442]
[INFO] [stereonet_model_node-2]: process started with pid [8444]
[INFO] [boost -3]: process started with pid [8446]
[INFO] [boost -3]: process has finished cleanly [pid 8446]
[INFO] [hobot_codec_republish-4]: process started with pid [8448]
[INFO] [websocket-5]: process started with pid [8450]
[hobot_codec_republish-4] [WARN] [1744282400.636473351] [hobot_codec_encoder]: Parameters:
[hobot_codec_republish-4] sub_topic: /StereoNetNode/stereonet_visual
[hobot_codec_republish-4] pub_topic: /image_jpeg
[hobot_codec_republish-4] channel: 1
[hobot_codec_republish-4] in_mode: ros
[hobot_codec_republish-4] out_mode: ros
[hobot_codec_republish-4] in_format: bgr8
[hobot_codec_republish-4] out_format: jpeg
[hobot_codec_republish-4] enc_qp: 10
[hobot_codec_republish-4] jpg_quality: 60
[hobot_codec_republish-4] input_framerate: 30
[hobot_codec_republish-4] output_framerate: -1
[hobot_codec_republish-4] dump_output: 0
[hobot_codec_republish-4] [WARN] [1744282400.642139745] [HobotCodecImpl]: platform x5
[mipi_cam-1] [WARN] [1744282400.869593039] [mipi_node]: dual_combine value: 1
[mipi_cam-1] [WARN] [1744282400.869775288] [mipi_node]: frame_ts_type value: sensor
[mipi_cam-1] [WARN] [1744282400.876006930] [mipi_factory]: board_type X5_RDK
[mipi_cam-1]
[mipi_cam-1] [WARN] [1744282400.876953176] [mipi_cam]: this board support mipi:
[mipi_cam-1] [WARN] [1744282400.877160883] [mipi_cam]: host 0
[mipi_cam-1] [WARN] [1744282400.877207300] [mipi_cam]: host 2
[mipi_cam-1] [WARN] [1744282400.877440382] [mipi_cam]: cal_file:/opt/tros/humble/lib/mipi_cam/config/calib_params.yaml
[mipi_cam-1] 无法打开标定参数文件!
[websocket-5] [WARN] [1744282400.949031636] [websocket]:
[websocket-5] Parameter:
[websocket-5] image_topic: /image_jpeg
[websocket-5] image_type: mjpeg
[websocket-5] only_show_image: 1
[websocket-5] output_fps: 0
[stereonet_model_node-2] [BPU_PLAT]BPU Platform Version(1.3.6)!
[stereonet_model_node-2] [HBRT] set log level as 0. version = 3.15.55.0
[stereonet_model_node-2] [DNN] Runtime version = 1.24.5_(3.15.55 HBRT)
[stereonet_model_node-2] [A][DNN][packed_model.cpp:247][Model](2025-04-10,18:53:21.386.955) [HorizonRT] The model builder version = 1.24.3
[stereonet_model_node-2] Model info:
[stereonet_model_node-2] model_name: x5baseplus_alldata_woIsaac_yuv444
[stereonet_model_node-2] Input count: 2
[stereonet_model_node-2] input[0]: tensorLayout: 2 tensorType: 1 validShape:(1, 3, 352, 640, ), alignedShape:(, 1, 3, 352, 640) quantiType: 0 alignedByteSize: 337920
[stereonet_model_node-2] input[1]: tensorLayout: 2 tensorType: 1 validShape:(1, 3, 352, 640, ), alignedShape:(, 1, 3, 352, 640) quantiType: 0 alignedByteSize: 337920
[stereonet_model_node-2] Output count: 2
[stereonet_model_node-2] input[0]: tensorLayout: 2 tensorType: 13 validShape:(1, 9, 352, 640, ), alignedShape:(, 1, 9, 352, 640) quantiType: 0 alignedByteSize: 8110080
[stereonet_model_node-2] input[1]: tensorLayout: 2 tensorType: 13 validShape:(1, 9, 352, 640, ), alignedShape:(, 1, 9, 352, 640) quantiType: 0 alignedByteSize: 8110080
[stereonet_model_node-2] [WARN] [1744282401.518609811] [StereoNetNode]: Add StereoRectify Instance: stereo0
[stereonet_model_node-2] calib model: pinhole
[stereonet_model_node-2] Kl:
[stereonet_model_node-2] [550.8035496757482, 0, 661.1263865968855;
[stereonet_model_node-2] 0, 493.2217446270412, 303.1855486861886;
[stereonet_model_node-2] 0, 0, 1]
[stereonet_model_node-2] Dl:
[stereonet_model_node-2] [-0.2711243156151719, 0.05060829228589933, 0.0008875379580411214, -0.002327649533853763]
[stereonet_model_node-2] Kr:
[stereonet_model_node-2] [553.8719837106196, 0, 624.0414884734051;
[stereonet_model_node-2] 0, 494.1581133345531, 273.4937625955584;
[stereonet_model_node-2] 0, 0, 1]
[stereonet_model_node-2] Dr:
[stereonet_model_node-2] [-0.2788646377570498, 0.05429183538657035, 0.001719021677286618, 0.0004764791436115057]
[stereonet_model_node-2] R, t:
[stereonet_model_node-2] [0.9999509436461581, 0.0004894496829122635, 0.00989296417593623;
[stereonet_model_node-2] -0.0005603264721328329, 0.9999741893898487, 0.007162861745138554;
[stereonet_model_node-2] -0.00988920297208464, -0.007168053650973828, 0.9999254085537852]
[stereonet_model_node-2] [-0.07003079278398011;
[stereonet_model_node-2] 0.001125517447520849;
[stereonet_model_node-2] -0.0006298903345308758]
[stereonet_model_node-2] calib file width, height: 1280, 640
[stereonet_model_node-2] model input width, height: 640, 352
[stereonet_model_node-2] fov_scale: 0.8
[stereonet_model_node-2]
[stereonet_model_node-2] [WARN] [1744282401.551854678] [StereoNetNode]: => rectified fx: 527.193115, fy: 527.193115, cx: 659.710022, cy: 360.584015, base_line: :0.119893
[mipi_cam-1] mipi mclk is not configed.
[mipi_cam-1] Searching camera sensor on device: /proc/device-tree/soc/cam/vcon@0 mclk_is_not_configed: 1
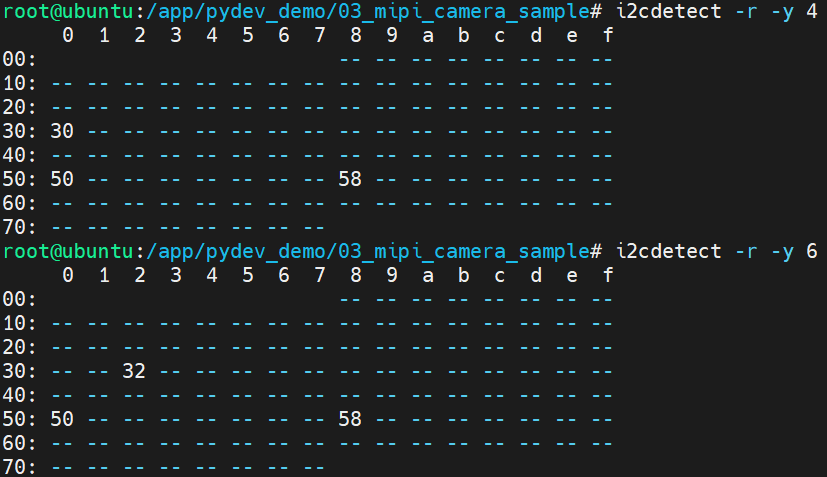
[mipi_cam-1] i2c bus: 6 mipi rx phy: 0
[mipi_cam-1] WARN: Sensor Name: sc1330t, Expected Chip ID: 0xCA18, Actual Chip ID Read: 0x00
[mipi_cam-1] WARN: Sensor Name: irs2875-tof, Expected Chip ID: 0x2875, Actual Chip ID Read: 0x00
[mipi_cam-1] WARN: Sensor Name: sc230ai-30fps, Expected Chip ID: 0xCB34, Actual Chip ID Read: 0x00
[mipi_cam-1] INFO: vp_sensor_detect_2 Support sensor index:0, sensor_name:sc230ai-30fps on mipi rx csi 0, i2c addr 0x32, config_file:linear_1920x1080_raw10_30fps_1lane.c
[mipi_cam-1] mipi mclk is not configed.
[mipi_cam-1] Searching camera sensor on device: /proc/device-tree/soc/cam/vcon@2 mclk_is_not_configed: 1
[mipi_cam-1] i2c bus: 4 mipi rx phy: 2
[mipi_cam-1] WARN: Sensor Name: sc1330t, Expected Chip ID: 0xCA18, Actual Chip ID Read: 0xCB34
[mipi_cam-1] WARN: Sensor Name: irs2875-tof, Expected Chip ID: 0x2875, Actual Chip ID Read: 0x00
[mipi_cam-1] INFO: vp_sensor_detect_2 Support sensor index:2, sensor_name:sc230ai-30fps on mipi rx csi 2, i2c addr 0x30, config_file:linear_1920x1080_raw10_30fps_1lane.c
[mipi_cam-1] mipi mclk is not configed.
[mipi_cam-1] Searching camera sensor on device: /proc/device-tree/soc/cam/vcon@2 mclk_is_not_configed: 1
[mipi_cam-1] i2c bus: 4 mipi rx phy: 2
[mipi_cam-1] INFO: vp_sensor_fixed_mipi_host_1 Found sensor_name:sc230ai-30fps on mipi rx csi 2, i2c addr 0x30, config_file:linear_1920x1080_raw10_30fps_1lane.c
[mipi_cam-1] ----------------
[mipi_cam-1] check_0:255
[mipi_cam-1] chip_type:�������������������������������onfig/
[mipi_cam-1] checksum:255
[mipi_cam-1] sum:0
[mipi_cam-1] --------------
[mipi_cam-1] eeprom check failure bus:4,addr:80,device_nameP24C64G-C4H-MIR
[mipi_cam-1] ----------------
[mipi_cam-1] check_0:1
[mipi_cam-1] chip_type:SC230AI
[mipi_cam-1] checksum:183
[mipi_cam-1] sum:182
[mipi_cam-1] --------------
[mipi_cam-1] Kl:
[mipi_cam-1] [790.67282772, 0, 929.13207133;
[mipi_cam-1] 0, 790.94709671, 556.10836105;
[mipi_cam-1] 0, 0, 1]
[mipi_cam-1] Dl:
[mipi_cam-1] [0.75575636, 0.09272825, 5.927e-05, 2.037e-05, 0.00094747, 1.13111697, 0.27240028, 0.01046174]
[mipi_cam-1] Kr:
[mipi_cam-1] [801.3497595600001, 0, 983.08896714;
[mipi_cam-1] 0, 801.29569057, 522.95316265;
[mipi_cam-1] 0, 0, 1]
[mipi_cam-1] Dr:
[mipi_cam-1] [0.75575636, 0.09272825, 2.86e-06, 4.668e-05, 0.00094747, 1.13111697, 0.27240028, 0.01046174]
[mipi_cam-1] R_rl:
[mipi_cam-1] [0.9999819599999999, -0.00029721, -0.00599845;
[mipi_cam-1] 0.00029459, 0.99999986, -0.00043817;
[mipi_cam-1] 0.00599857, 0.00043639, 0.99998191]
[mipi_cam-1] t_rl:
[mipi_cam-1] [-0.07039885999999999;
[mipi_cam-1] -0.00019137;
[mipi_cam-1] 0.00123769]
[mipi_cam-1] Wrong coordinate (1004.655518, -0.242919) (1007.623108, -0.227773) (1004.683228, 1.854633) (1007.655762, 1.869821), must bigger than 0
[mipi_cam-1] [ERROR] [1744282402.126031004] [mipi_cap]: hbn_gen_gdc_bin failed, ret = 0
[mipi_cam-1]
[mipi_cam-1] [WARN] [1744282402.138666162] [mipi_cap]: gdc bin file ������ open failed
[mipi_cam-1]
[mipi_cam-1] [WARN] [1744282403.331056908] [mipi_cap]: gdc bin file ������ open failed
[mipi_cam-1]
[mipi_cam-1] [WARN] [1744282404.354152304] [mipi_cam]: [init]->cap default init success.
[mipi_cam-1]
[mipi_cam-1] [WARN] [1744282404.354376219] [mipi_cam]: cal_file:/opt/tros/humble/lib/mipi_cam/config/calib_params.yaml
[mipi_cam-1] 无法打开标定参数文件!
[mipi_cam-1] [WARN] [1744282404.354512844] [mipi_node]: get camera calibration parameters failed
[mipi_cam-1] creat_camera_node cam_fd = 187650920287784
[mipi_cam-1] csi2 ignore mclk ex attr, because not config mclk.
[mipi_cam-1] lpwm_enable: 0
[mipi_cam-1] lpwm_index: 0, trigger_source: 0, trigger_mode: 0, period: 33332, offset: 10, duty_time: 100, threshold: 0, adjust_step: 0
[mipi_cam-1] lpwm_index: 1, trigger_source: 0, trigger_mode: 0, period: 33332, offset: 10, duty_time: 100, threshold: 0, adjust_step: 0
[mipi_cam-1] lpwm_index: 2, trigger_source: 0, trigger_mode: 0, period: 33332, offset: 10, duty_time: 100, threshold: 0, adjust_step: 0
[mipi_cam-1] lpwm_index: 3, trigger_source: 0, trigger_mode: 0, period: 33332, offset: 10, duty_time: 100, threshold: 0, adjust_step: 0
[mipi_cam-1] mipi mclk is not configed.
[mipi_cam-1] Searching camera sensor on device: /proc/device-tree/soc/cam/vcon@0 mclk_is_not_configed: 1
[mipi_cam-1] i2c bus: 6 mipi rx phy: 0
[mipi_cam-1] WARN: Sensor Name: sc230ai-30fps, Expected Chip ID: 0xCB34, Actual Chip ID Read: 0x00
[mipi_cam-1] INFO: vp_sensor_fixed_mipi_host_1 Found sensor_name:sc230ai-30fps on mipi rx csi 0, i2c addr 0x32, config_file:linear_1920x1080_raw10_30fps_1lane.c
[mipi_cam-1] creat_camera_node cam_fd = 187650920288264
[mipi_cam-1] csi0 ignore mclk ex attr, because not config mclk.
[mipi_cam-1] lpwm_enable: 0
[mipi_cam-1] lpwm_index: 0, trigger_source: 0, trigger_mode: 0, period: 33332, offset: 10, duty_time: 100, threshold: 0, adjust_step: 0
[mipi_cam-1] lpwm_index: 1, trigger_source: 0, trigger_mode: 0, period: 33332, offset: 10, duty_time: 100, threshold: 0, adjust_step: 0
[mipi_cam-1] lpwm_index: 2, trigger_source: 0, trigger_mode: 0, period: 33332, offset: 10, duty_time: 100, threshold: 0, adjust_step: 0
[mipi_cam-1] lpwm_index: 3, trigger_source: 0, trigger_mode: 0, period: 33332, offset: 10, duty_time: 100, threshold: 0, adjust_step: 0
[mipi_cam-1] [ERROR] [1744282404.533266219] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282404.533589176] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282404.674873658] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282404.675148615] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282404.816545014] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282404.816868346] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282404.958219036] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282404.958758034] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282405.099707144] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282405.100047184] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282405.241350876] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282405.241437751] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282405.382899859] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282405.382916026] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282405.524600259] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282405.524754258] [mipi_node]: grab failed
[hobot_codec_republish-4] [ERROR] [1744282405.642653876] [hobot_codec_encoder]: Hobot_Codec has not received image for more than 5 seconds! Please check whether the image publisher still exists by ‘ros2 topic info /StereoNetNode/stereonet_visual’!
[mipi_cam-1] [ERROR] [1744282405.666261950] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282405.666456116] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282405.807903599] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282405.808216765] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282405.949577457] [mipi_node]: grab failed
[mipi_cam-1] [ERROR] [1744282405.949810789] [mipi_node]: grab failed
[websocket-5] [ERROR] [1744282405.966784056] [websocket]: Websocket did not receive image data! Please check whether the image publisher still exists by ‘ros2 topic info /image_jpeg’!