用以下方法部署yolov11遇到一些问题,一个是原本的yolov8workconfig.json和coco.list文件无法修改,修改完运行会自动恢复原内容,新建json和list文件后运行却又提示找不到路径,只能运行原有的80个类别的检测。另一个是我需要通过串口发送检测物体的位置信息,用TROS方法该如何驱动外设呢?
安装或更新tros-humble-hobot-dnn等功能包
sudo apt update # 确保有地瓜apt源
sudo apt install -y tros*-dnn-node* tros*-hobot-usb-cam tros*-hobot-codec
拷贝tros-humble-hobot-dnn 的配置文件
cp -r /opt/tros/humble/lib/dnn_node_example/config .
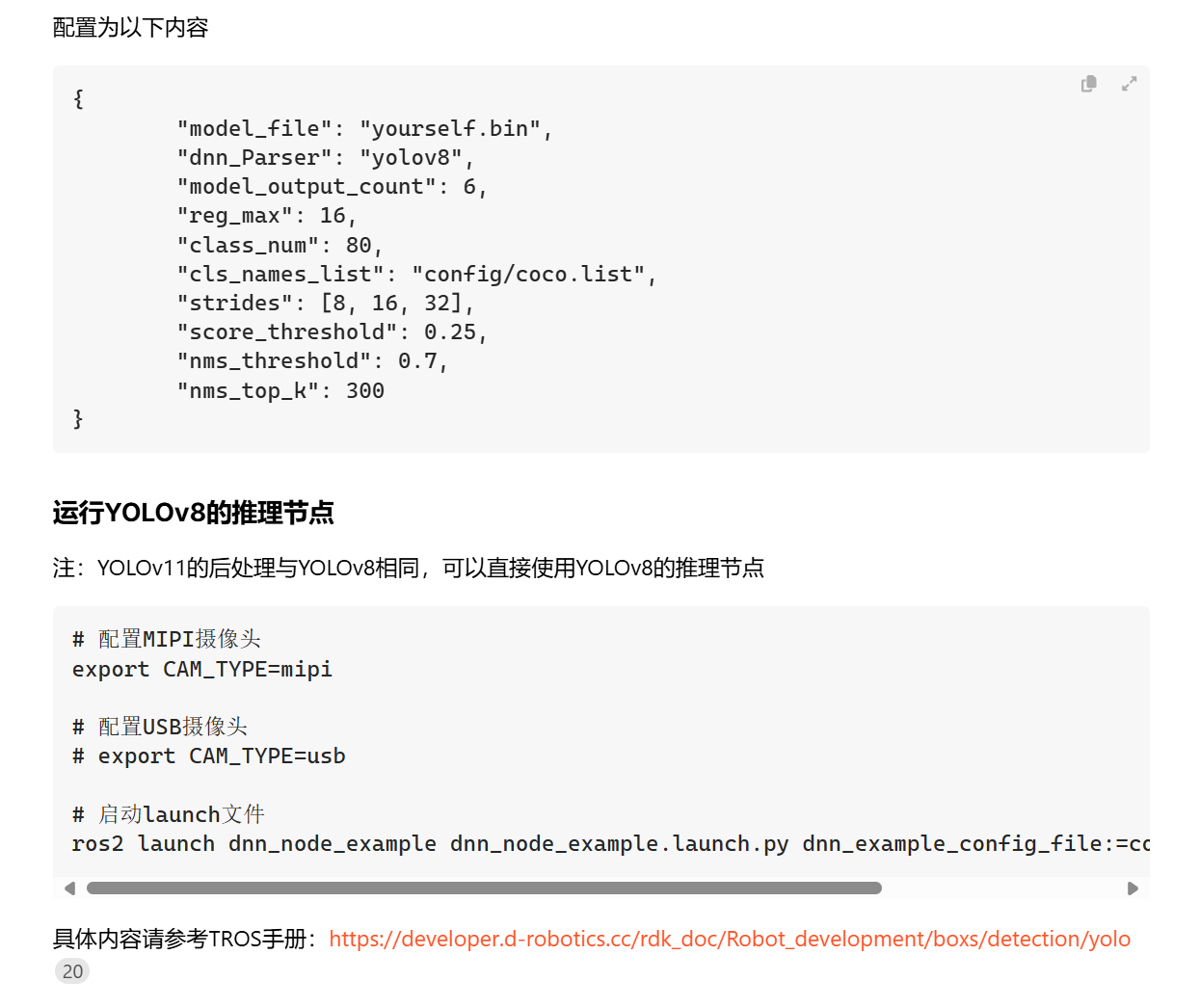
配置为以下内容
{
“model_file”: “yourself.bin”,
“dnn_Parser”: “yolov8”,
“model_output_count”: 6,
“reg_max”: 16,
“class_num”: 1,
“cls_names_list”: “config/coco.list”,
“strides”: [8, 16, 32],
“score_threshold”: 0.25,
“nms_threshold”: 0.7,
“nms_top_k”: 300
}
运行YOLOv8的推理节点
注:YOLOv11的后处理与YOLOv8相同,可以直接使用YOLOv8的推理节点
export CAM_TYPE=usb
ros2 launch dnn_node_example dnn_node_example.launch.py dnn_example_config_file:=config/my_workconfig.json