你好,camera.all.launch,运行后不报错但摄像头打不开是怎么回事,我们巡线和障碍物检测都没有问题
给出详细日志呢,文中内容仅供参考需要结合实际情况修改,不报错但摄像头打不开,巡线和障碍物检测都没有问题本身存在矛盾
需要简单学习ros2 launch基础: ROS 2 Documentation — ROS 2 Documentation: Humble documentation
没有看到你启动了web_node节点
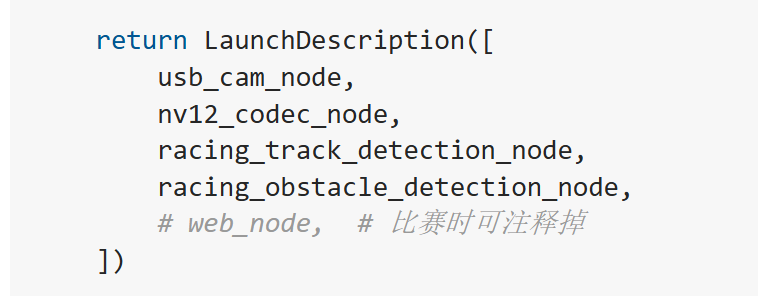
你好,我看了一下,camera_all.launch文件里有关于web_node的代码,最后返回值把web_node前#去掉了,但在ROS web的展示端还是看不到小车视角的巡线和避障检测
请检查自己的launch文件,文中示例不会打印web_show信息,你的日志中也没有启动了web_node的相关信息

大佬,yolov5要检测的数据是赛道+障碍物+二维码+停车位吗
racing_control里面有针对yolo赛道类型的处理吗还是需要自己写
个人建议仅供参考,逻辑部分需要修改源码自己去写
大佬你好,你这里有yolo5 2.0源码链接吗谢谢啦

大佬,请问代码里面避障时间给的是2秒,可是实际上避障用了不止2秒,转弯非常大用时很长,这是什么原因啊
// 创建30ms周期的定时器(控制频率33Hz)
timer_ = create_wall_timer(std::chrono::milliseconds(30), std::bind(&RacingControlNode::timer_callback, this));
ObstaclesAvoiding();
avoid_time_now_ += 0.03; // 累计时间(30ms周期)
你好,请问你用教程上的代码,运行# Terminal 1: 底盘控制
ros2 launch origincar_base origincar_bringup.launch.py
Terminal 2: 视觉处理模块(集成版)
ros2 launch origincar_bringup camera_all.launch.py
Terminal 3: 智能控制
ros2 launch racing_control racing_control.launch.py
后实现避障了吗
confing文件里的图像节点错了,改成自己用的节点
文档教程只能提供一个基础的完赛思路,不能保证给出完赛源代码,任然需要自己学习动手开发
推荐使用闭环逻辑,本身软件计时就会存在偏差

同样的问题,请问一下解决了不哥