图像分类任务中的Transformer实战
作者:SkyXZ
CSDN:SkyXZ~-CSDN博客
博客园:SkyXZ - 博客园
最近具身智能足够火热,VLM、VLA、VLN层出不穷发展迅速,而Transformer作为这些架构最重要的底座之一,得益于其强大的建模能力、良好的可扩展性与统一的结构设计,Transformer 已经成为构建多模态智能系统的事实标准。从最初的 BERT、GPT 在 NLP 中的成功,到 ViT、CLIP、RT-1 等模型在视觉和控制领域的延伸,Transformer 构筑起了统一语言、视觉乃至动作空间的桥梁。
既然Transformer 成为了具身智能的基础设施,那作为一名想走进机器人、走进未来的工程师,我当然也要学会它。 于是我决定从最经典、最基础的 Vision Transformer(ViT)入手,一步步从原理出发,亲手用 PyTorch 复现,并整理下这一路的学习过程与思考,作为这篇博客的分享内容。如果你也对 Transformer 在视觉领域的应用感兴趣,或者正在入门具身智能相关方向,希望这篇文章能对你有所帮助!
PS:![]() 项目完整代码已上传至Github:ViT_PyTorch,如果你在阅读中有任何问题、建议或错误指出,也欢迎在评论区与我讨论,我们共同进步!
项目完整代码已上传至Github:ViT_PyTorch,如果你在阅读中有任何问题、建议或错误指出,也欢迎在评论区与我讨论,我们共同进步!
一、ViT:从论文出发理解架构设计
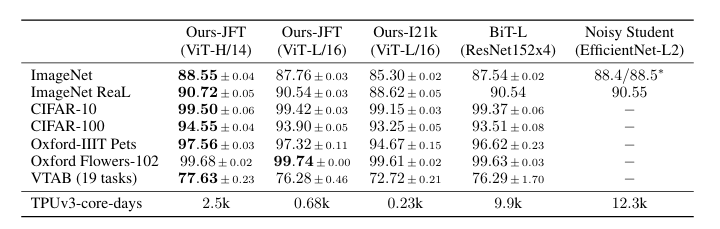
在正式动手复现之前,我们先从源头出发,来读一读 Vision Transformer 的原始论文:《An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale》[arXiv:2010.11929]。这是由 Google Research 于 2020 年提出的一篇具有里程碑意义的论文,它首次展示了 纯 Transformer 架构在图像分类任务上可以不依赖任何卷积模块,依然取得优秀性能。
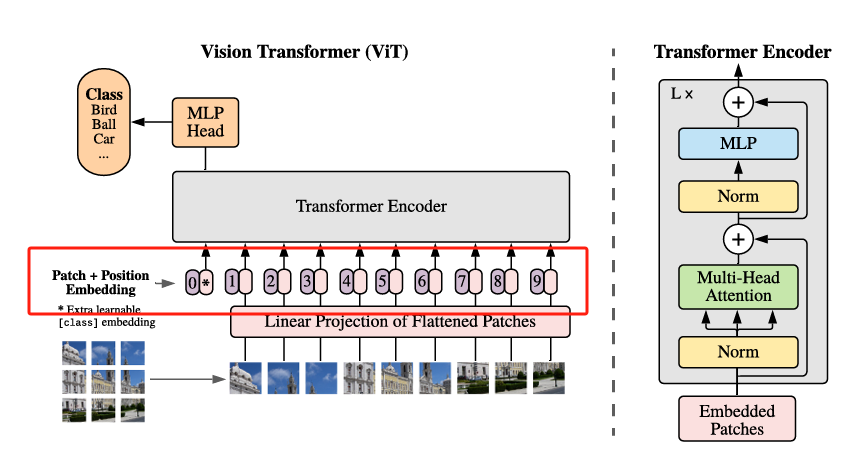
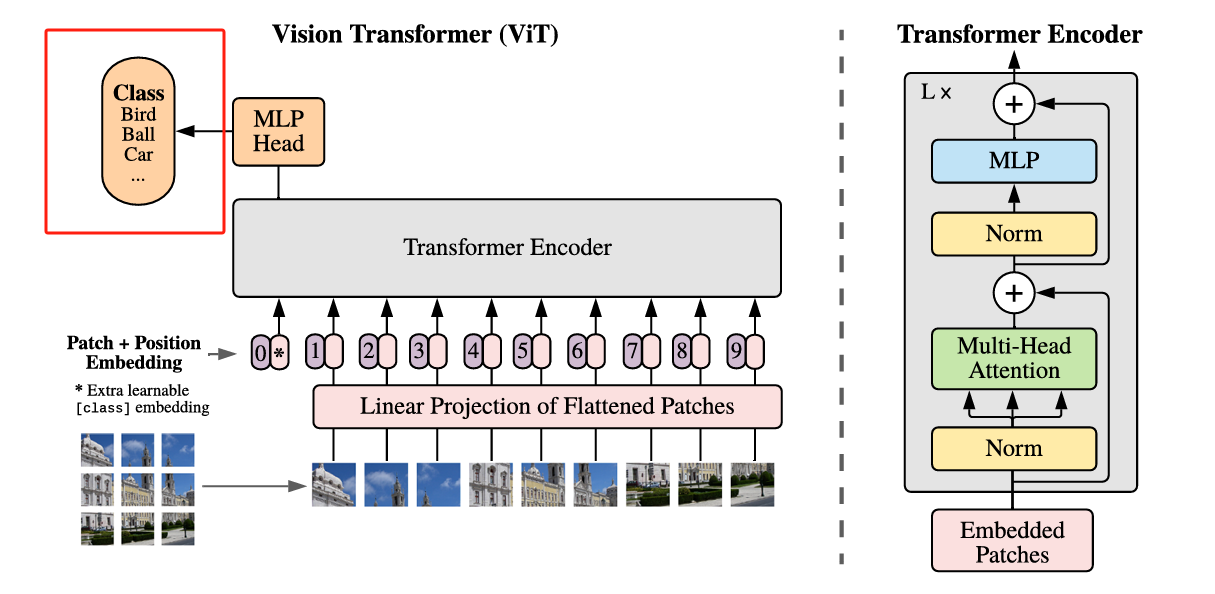
Transformer 原本是为了解决语言文字处理任务而提出的模型,其设计初衷是用于建模序列数据中的长距离依赖关系。在 NLP 领域中,Transformer 能够通过自注意力机制灵活地捕捉单词之间的全局关系,极大提升了语言理解与生成的能力。而谷歌的研究团队提出了非常大胆也非常优雅的一个思想:如果我们能把图像切割成小块(Patch),再把每个 Patch 当作一个“词”,是否也能将图像转化为序列,从而让 Transformer 也能处理视觉信息?而其提出的ViT 就是这样做的:它将一张图像划分为固定大小的 Patch(如 16×16),将每个 Patch 展平成向量,再通过一个线性投影层将其映射到统一的维度空间,最终形成一个 token 序列。随后,ViT 在这个 token 序列前加上一个可学习的 [CLS] token,并叠加位置编码(Positional Encoding),以保留图像中的空间位置信息。整个序列就像一段文本,送入多层标准的 Transformer 编码器结构进行处理,最后通过 CLS token 的输出,完成整张图像的分类任务。这种方法不依赖任何卷积操作,完全基于序列建模,展现了 Transformer 在图像建模上的巨大潜力。
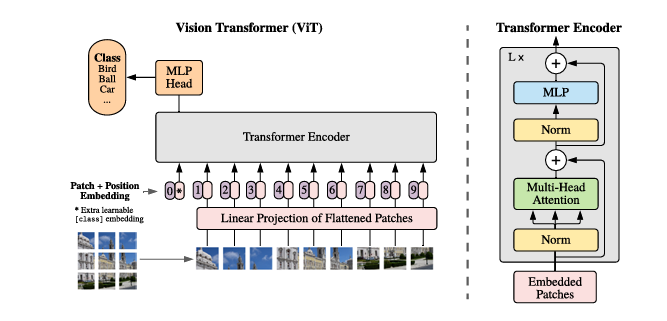
ViT的架构如上图,与寻常的分类网络类似,整个Vision Transformer可以分为两部分,一部分是特征提取部分,另一部分是分类部分,特征提取部分是其最核心的组成,它包括了Patch Embedding、Positional Encoding以及Transformer Encoder,分类部分 则是紧接在特征提取之后,通过一个可学习的 [CLS] token 来代表整张图像的全局语义。这个 token 会随着其他 token 一起参与 Transformer 编码过程,最终被送入一个简单的 MLP 分类头 进行类别预测。接下来我们按照如下的划分来逐个讲解ViT网络架构
- 图像分块与线性嵌入模块(Patch Embedding)
ViT 的第一步操作,就是将输入图像转化为一系列的 视觉 token,这个过程被称为 Patch Embedding,Patch 指的就是分割后的一小块图像区域,它的核心思想非常直接:
将一张二维图像按照固定大小(如 16×16)划分成若干个小块(Patch),然后将每个 Patch 展平成一个向量,再通过一个线性层将其映射到指定的维度空间(例如 768维),从而得到一组输入 token,供 Transformer 使用。
这个处理方式本质上就是在模拟 NLP 中“将每个单词编码为向量”的过程——只不过这里的“单词”是图像块 patch,而不是文字,我们假设假设输入图像大小为 224×224×3,Patch 大小为 16×16,则一张图像将被划分为$ (224/16)^2=14×14=196$ 个 patch,而每个 Patch 将被展平成一个 $16 × 16 × 3 = 768$ 维的向量,将其展平成向量后,再通过一个 Linear 层映射到模型的 embedding 空间(手动设置,ViT-Base为 768 维,ViT-Large为1024,ViT-Huge为1280,通常使用768),最终我们就能得到一个形状为:[batch_size, 196, embed_dim]的patch token 序列,而我们该如何对图像进行分割实现Patch Embedding呢?这时候我们便可以想到我们的卷积,由于卷积使用的是滑动窗口的思想,因此我们只需要将卷积核以及步长设置成与Patch-Size相等便可,这时两个图片区域的特征提取过程就不会有重叠,当我们输入的图片是[224, 224, 3]的时候,我们可以获得一个[14, 14, 768]的特征层。
而获得了特征信息之后我们需要将得到的特征信息组合成序列,组合的方式很简单,我们只需要对这个特征图进行展平(Flatten)并转置为标准序列格式,便可以得到最终的 Patch Token 序列,用于输入 Transformer,我们在上面对图像进行分割后得到了一个[14, 14, 768]的特征层,我们将这个特征图的高宽维度进行平铺后即可得到一个[196, 768]的特征层,至此Patch Embedding便完成啦!
- 分类标记与位置编码模块(cls_token + Position Embedding)
在完成 Patch Embedding 得到形如 [batch_size, 196, 768] 的 Patch Token 序列后,接下来我们要做两件关键的事情:
-
添加
[CLS] Token—— 图像的“全局摘要”入口Transformer 最初在处理文本任务时,会在序列的最前面添加一个特殊的
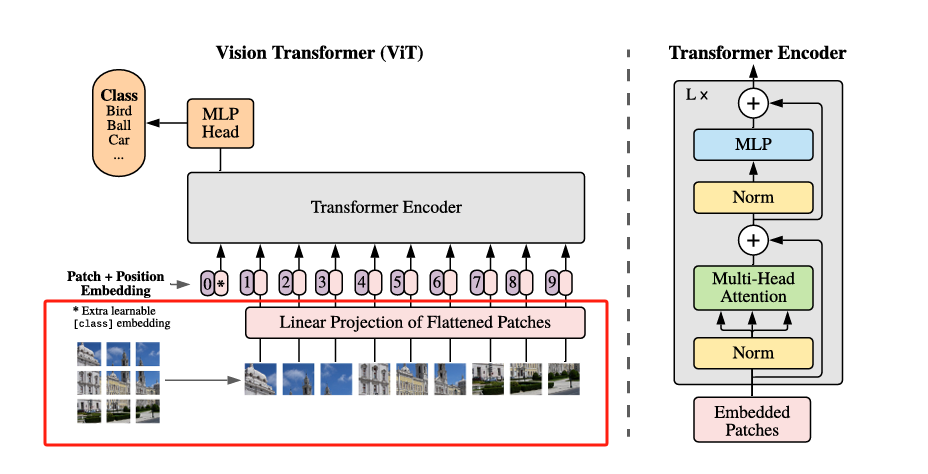
[CLS]Token,用于聚合整个句子的语义信息。同理,在 ViT 中也引入了[CLS] Token,它并不代表某个具体的 Patch,而是作为一个全局的代表 Token,在 Transformer 中“参与”每一层的信息交互,最终用于提取整个图像的全局特征。如上图所示,编号为0*的那个位置即表示[CLS] Token,其初始值是一个可学习的参数向量,维度与 Patch Token 相同(例如 768),经过 Transformer 编码后,ViT 会使用这个[CLS] Token的输出向量作为图像的分类结果输入到 MLP Head 中,完成最终分类。添加了
[CLS] Token之后,原本的196个 Patch Token 序列就变成了197个 Token,形状变为了形如:[batch_size, 196 + 1, 768] -
添加位置编码(Positional Embedding)—— 帮助模型理解“图像中的位置”
由于 Transformer 是完全基于自注意力机制构建的,它并不具备卷积网络中天然的位置信息建模能力。所以我们还需要给每个 Token 添加一个位置编码,用于告诉模型这个 Token 来自于图像的哪一块区域。ViT 采用的是一种 可学习的绝对位置编码,也就是为每一个 Token 的位置(包括
[CLS]Token)都初始化一个可学习的位置向量,并与原始 Token 相加,这样,模型就能在学习过程中自己掌握空间顺序和语义之间的关系。位置编码的形状与输入序列一致,也是
[1, 196 + 1, 768],且位置编码的加入方式非常简单即:tokens = tokens + pos_embed # [B, 197, 768],经过这两个步骤之后,ViT 的输入才真正准备好,可以送入 Transformer 编码器中进行多层特征交互与建模,至此cls_token + Position Embedding便完成啦!
- 标准 Transformer 编码器(Multi-head Attention + LayerNorm + MLP + 残差连接)
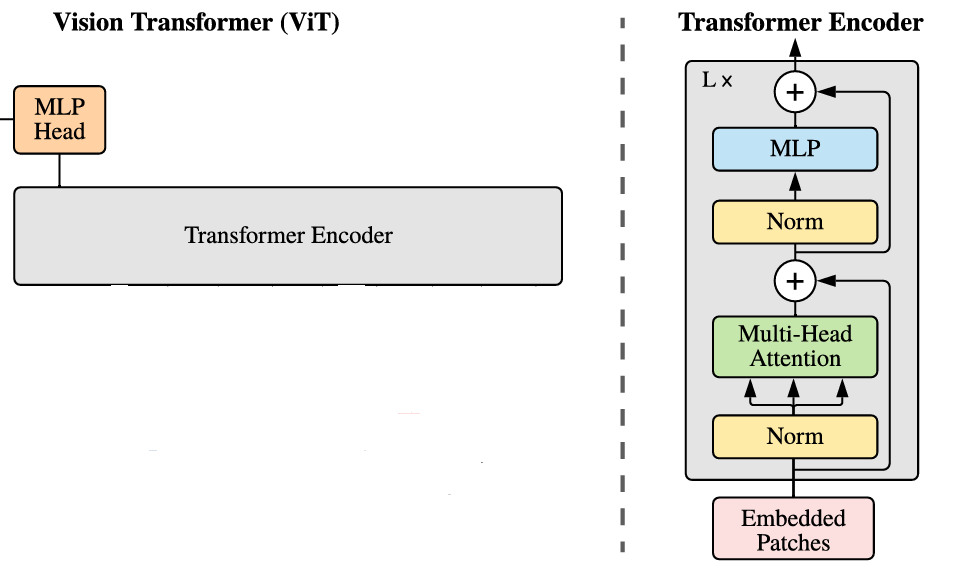
当我们得到了带有 [CLS] Token 和位置编码的完整 Patch 序列(形状为 [B, 197, 768])之后,ViT 会将其送入一系列标准的 Transformer Encoder Block 中进行深度建模。每一个 Block 的设计与原始的 NLP Transformer 中的 Encoder 保持一致,结构非常经典,由两个子模块组成:
-
LayerNorm + 多头自注意力机制(Multi-Head Self Attention)
在这个子模块中,我们首先对输入进行 LayerNorm 归一化,再送入 Multi-Head Self-Attention 模块,这里的自注意力的作用是建立所有 Token 之间的全局关系,使每个 Token 都能获取其他区域的信息,这也是Transformer的灵魂部分,其具体实现则是让每个 Token 通过查询(Query)与所有其他 Token 的键(Key)进行匹配,计算其对其他位置的关注权重,从而提取对当前任务最有用的信息。用公式和图片表示如下:
$$
\text{Attention}(Q, K, V) = \text{Softmax}\left( \frac{QK^\top}{\sqrt{d_k}} \right) V
$$
对于初学者来说,这部分内容看起来可能会比较抽象,但是我们如果将它拆解一步一步来看,其实非常直观。在多头自注意力机制中,每一个输入的 Token(图像的 Patch)都会被分别映射出三个向量,分别是:Query(查询向量)、Key(键向量)、Value(值向量),用一个简单明了的比喻来理解:假设你在参加一次会议(注意力机制),你是 Query,而会议室里每一个与会者(包括你自己)都是一个 Key,同时他们手里都拿着一份资料(Value),你会根据自己和其他人 Key 的“相似程度”决定你要多大程度参考他们的资料(Value)——这就是注意力权重的计算。设当前输入序列为矩阵 $X \in \mathbb{R}^{n \times d}$,其中 $n$ 是序列长度(例如 ViT 中是 197 个 Token),$d$ 是每个 Token 的维度(例如 768)。我们用三组可学习的参数矩阵将其变换为:
$$
[
Q = XW^Q,\quad K = XW^K,\quad V = XW^V
]
$$
然后计算注意力得分(Score):
$$
[
\text{Score} = \frac{QK^\top}{\sqrt{d_k}}
]
$$
接着使用 Softmax 对得分进行归一化,得到注意力权重 $\alpha$:
$$
[
\alpha = \text{Softmax}\left( \frac{QK^\top}{\sqrt{d_k}} \right)
]
$$
最后加权组合所有 Value 向量,得到新的输出表示:
$$
[
\text{Attention}(Q, K, V) = \alpha V
]
$$
**这套计算流程用人话说就是,**我们这套注意力系统假设有三个输入分别是input-1、input-2、input-3以及三个对应的输出output-1、output-2、output-3,每个输入都有他们自己的QKV向量
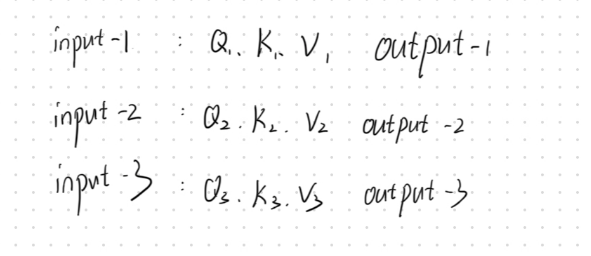
如果我们要求output-1,那我们首先先将input-1的Q查询向量与三个输入的K键向量分别相乘得到对应的分数,这个分数代表的便是 input-1 对其它三个输入的“注意力程度”;接下来我们将这三个分数分别求一次softmax使它们变成 0 到 1 之间的概率值,并且加起来为 1,这个过程可以理解为:分配关注度,告诉我们该“关注谁、关注多少”;最后,用刚才得到的这三个注意力权重,去分别加权对应的 值向量 V,再把它们加在一起,得到的就是最终的 output-1
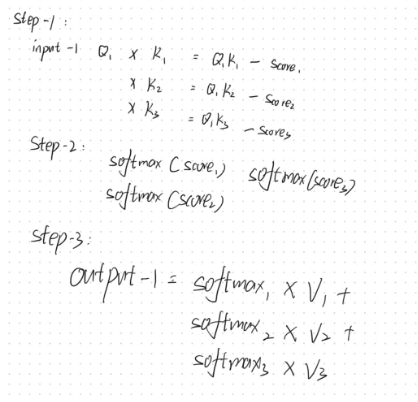
也就是说:输出 = 所有关注对象的“值” × “关注它的程度”的加权和。每个 Query 会根据与所有 Key 的相似程度,对对应的 Value 进行加权求和;这样的话所有 Token 之间都能进行信息交换,从而捕捉 全局上下文依赖;因此最后的输出的虽然仍然是一个与原始 Token 数量相同的新序列,但每个 Token 的表示已经融合了全局信息。
-
LayerNorm + MLP 前馈神经网络
在每个 Transformer Block 中,除了注意力机制之外,还有一个非常重要的部分,那就是 前馈神经网络(Feed Forward Network, FFN),也常被称为 MLP 子模块。这个子模块的结构其实非常简单,就是两个全连接层(Linear),中间再加一个非线性激活函数(如 GELU):
$$
FFN(x)=Linear
2
(GELU(Linear
1
(x)))
$$
这里的 Linear 层也就是我们熟悉的全连接层,维度的变化一般是这样的:首先第一个 Linear 层会把输入的维度从d_model(比如 768)提升到一个更高的维度(比如 3072),接着通过 GELU 激活函数引入非线性,最后再用一个 Linear 层将维度降回原来的d_model这个 FFN 的结构可以理解为对每个 Token 独立地进行更深层次的特征变换。不同于多头自注意力机制那种跨 Token 的信息交互,前馈神经网络的处理是逐 Token 的点对点非线性变换,主要用于增强模型的表达能力。而残差连接的引入可以在每个 Transformer Block 内形成一种短路路径(Shortcut Path),它能有效缓解深层网络中的梯度消失问题:与其直接学习一个映射函数 $F(x)$,不如让网络学习 $F(x) = H(x) - x$,即让模型关注“输入与输出的差值”,这样反而更容易优化。因此完整的计算流程如下:
$$
y=x+FFN(LayerNorm(x))
$$
至此,ViT 的核心结构也就完整拼装完成了。从 Patch Embedding 到 [CLS] Token 与位置编码,再到深度的多层 Transformer 编码器,ViT 完整地将语言模型的结构移植到了视觉领域,并取得了突破性的表现。Transformer Block 是 ViT 的“建模大脑”,也是其通用性与强大性能的根基。
- 分类头(Classification Head)
经过多个 Transformer Block 的深度特征提取之后,我们得到了一个新的序列表示,其形状为 [B, 197, 768](假设我们使用的是 ViT-Base 模型),其中第一个位置的 Token 仍然是我们在最开始加入的 [CLS] Token。这个 [CLS] Token 可以看作是整个图像的全局语义表示,因为在多轮注意力交互中,它已经“融合”了所有 Patch 的信息。因此,我们只需要从序列中取出这一位置的向量(即第一个 Token),然后送入一个全连接层(Linear)就可以完成分类任务了。
二、实战复现PyTorch版ViT网络架构
(一)模块1:PatchEmbedding类
PatchEmbedding 是 ViT 中最关键的一步,我们在这里使用卷积操作将输入图像划分为若干不重叠的小块(Patch),每个 Patch 被编码为一个向量,我们采用等步长卷积的方式实现划分,并在展平后将其送入 Transformer 模块进行后续处理。
class VisionPatchEmbedding(nn.Module):
def __init__(self, image_size, patch_size, in_channels, embed_dim, flatter=True):
super().__init__()
self.proj = nn.Conv2d(in_channels, embed_dim, patch_size, patch_size)
self.norm = nn.LayerNorm(embed_dim)
self.flatter = flatter
def forward(self, x):
x = self.proj(x)
if self.flatter:
x = x.flatten(2).transpose(1, 2) # [B, C, H, W] -> [B, N, C]
x = self.norm(x)
return x
(二)模块2:PositionEmbedding
由于ViT 不像CNN,其没有卷积感受野,因此需要加入位置编码(pos_embed)来保留位置信息每一个Patch的位置信息
self.cls_token = nn.Parameter(torch.zeros(1, 1, num_features))
self.pos_embed = nn.Parameter(torch.zeros(1, num_patches + 1, num_features))
由ViTViT在预训练时通常使用固定分辨率(如 224x224),图像被分割为 14x14 个 Patch(patch_size=16),位置编码 pos_embed 的形状为 [1, 197, 768](197 = 1(cls_token) + 14x14),但是同样由于ViT没有感受野一说,因此实际应用当输入分辨率不同(如 256x256)时,Patch 数量变为 16x16 = 256(+1 cls_token = 257),原来的位置编码(197)便无法直接使用,因此我们需要通过双三次插值(bicubic)将 14x14 的位置编码调整到新分辨率对应的网格尺寸,具体实现如下:
img_token_pos_embed = F.interpolate(
img_token_pos_embed, size=self.features_shape, mode='bicubic', align_corners=False
)
pos_embed = torch.cat((cls_token_pos_embed, img_token_pos_embed), dim=1)
x = self.pos_drop(x + pos_embed)
(三)模块3:Multi-head Attention与MLP
接着我们实现Transformer中最关键的多头注意力机制,我们定义一个类SelfAttention 来实现了多头自注意力机制,在这个模块里我们先用一个线性层同时生成查询(Q)、键(K)、值(V),并按头数拆分维度,然后计算 Q 和 K 的点积并缩放,通过 softmax得到注意力权重,利用权重加权值(V),最后将多头结果拼接后通过线性变换和 dropout,使输出具有与输入维度相同的特征,完成信息的动态融合与表达增强。
class SelfAttention(nn.Module):
def __init__(self, dim, num_heads, qkv_bias=False, attn_drop_rate=0.0, proj_drop_rate=0.0):
super().__init__()
self.num_heads = num_heads
self.head_dim = dim // num_heads
self.scale = self.head_dim ** -0.5
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop_rate)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop_rate)
def forward(self, x):
B, N, C = x.shape
qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2,0,3,1,4)
q, k, v = qkv[0], qkv[1], qkv[2]
attn = torch.matmul(q, k.transpose(-2, -1)) * self.scale
attn = attn .softmax(dim=-1)
attn = self.attn_drop(attn)
x = torch.matmul(attn, v).transpose(1,2).reshape(B,N,C)
x = self.proj(x)
x = self.proj_drop(x)
return x
在这个 MLP 模块中,我设计了一个两层的全连接网络,首先通过 fc1 将输入特征映射到隐藏维度,然后经过激活函数非线性变换,接着用 dropout 做正则化防止过拟合,接着再通过 fc2 映射到输出维度,最后再用一次 dropout,这个过程用来帮助模型捕捉更丰富的非线性特征,提升表达能力。
class MLP(nn.Module):
def __init__(self, in_features, hidden_features, out_features, act_layer, drop_rate):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
drop_probs = (drop_rate, drop_rate)
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.drop1 = nn.Dropout(drop_probs[0])
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop2 = nn.Dropout(drop_probs[1])
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop1(x)
x = self.fc2(x)
x = self.drop2(x)
return x
(四)模块4:Encoder层堆叠
由于PyTorch中没有现成的DropPath函数可以使用,因此我们需要自己实现这一用法,在这里我们使用DropPath来随机丢弃完整路径实现深度网络的正则化,并在训练时以概率drop_path跳过当前模块并缩放剩余路径以保持期望值;在Block类中我则封装了完整的Transformer层结构,包含LayerNorm归一化、多头注意力、MLP前馈网络和残差连接,其中注意力部分使用我自定义的SelfAttention模块,MLP采用先扩展后压缩的结构设计,两者都集成了DropPath机制
于是一个完整的Transformer Block计算流程如下:
graph TD
A[输入 x]
A --> B[LayerNorm]
B --> C[Multi-Head Self-Attention]
C --> D["Residual Add: x + Attention"]
D --> E[LayerNorm]
E --> F[FeedForward MLP]
F --> G["Residual Add: D + MLP"]
G --> H[输出 y]
class DropPath(nn.Module):
def __init__(self, drop_prob=None):
super(DropPath, self).__init__()
self.drop_prob = drop_prob
def drop_path(self, x, drop_prob, training):
if drop_prob == 0. or not training:
return x
keep_prob = 1 - drop_prob
shape = (x.shape[0],) + (1,) * (x.ndim - 1)
random_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device)
random_tensor.floor_()
output = x.div(keep_prob) * random_tensor
return output
def forward(self, x):
return self.drop_path(x, self.drop_prob, self.training)
class Block(nn.Module):
def __init__(self, dim, num_heads, mlp_radio, qkv_bias, drop, attn_drop, drop_path, act_layer, norm_layer):
super().__init__()
self.norm_1 = norm_layer(dim)
self.attn = SelfAttention(dim, num_heads=num_heads, qkv_bias=qkv_bias, attn_drop_rate=attn_drop, proj_drop_rate=drop)
self.norm_2 = norm_layer(dim)
self.mlp = MLP(in_features=dim, hidden_features=int(dim * mlp_radio), out_features=None, act_layer=act_layer, drop_rate=drop_path)
self.drop_path = DropPath(drop_path) if drop_path > 0.0 else nn.Identity() # 丢弃路径
def forward(self, x):
x = x + self.drop_path(self.attn(self.norm_1(x)))
x = x + self.drop_path(self.mlp(self.norm_2(x)))
return x
(五)模块5:ViT整体模型类
最后我们来实现我们完整的ViT—VisonTransformer,在这个 VisonTransformer 类中,我将前面介绍的各个模块整合在一起,实现了完整的ViT网络。首先,我用卷积将输入图像切分成固定大小的Patch,并映射到特征空间;接着通过引入可学习的分类token和位置编码,为模型提供位置信息弥补卷积“感受野”缺失的问题。之后,我堆叠多个Transformer编码器Block,每个Block包含多头自注意力机制和MLP模块,通过残差连接和归一化保证信息的有效传递与特征抽象。最后,我取分类token的输出,通过线性层映射到目标类别,实现图像分类任务。
class VisonTransformer(nn.Module):
def __init__(self, input_shape, patch_size, in_channels, num_classes, num_features, depth,
num_heads, mlp_ratio, qkv_bias, drop_rate, attn_drop_rate, drop_path_rate,
norm_layer, act_layer):
super().__init__()
self.input_shape = input_shape # 输入的维度
self.patch_size = patch_size # Patch 的大小
self.in_channels = in_channels # 输入的维度
self.num_classes = num_classes # 输出类别数
self.num_features = num_features # 特征维度
self.depth = depth # Transformer编码器层数
self.num_heads = num_heads # Transformer注意力头数
self.mlp_ratio = mlp_ratio # MLP 比例 MLP:多层感知机,紧随 Self-Attention 之后,用于非线性变换:增强模型的表达能力;特征映射:将 Self-Attention 提取的特征进一步转换。
self.qkv_bias = qkv_bias # 是否使用偏置
self.drop_rate = drop_rate # 丢弃率
self.attn_drop_rate = attn_drop_rate # 注意力丢弃率
self.drop_path_rate = drop_path_rate # 丢弃路径率
self.norm_layer = norm_layer # 归一化层
self.act_layer = act_layer # 激活函数层
self.features_shape = [input_shape[1] // patch_size, input_shape[2] // patch_size] # [14, 14]
self.num_patches = self.features_shape[0] * self.features_shape[1]
self.patch_embed = VisionPatchEmbedding(input_shape, patch_size, in_channels, num_features) # 将输入图片分割成patch,并进行线性映射
# ViT 不是 CNN,没有"感受野",所以引入了位置编码,来为每个 patch 加上位置信息;
self.pretrained_features_shape = [224 // patch_size, 224 // patch_size] # 预训练的特征图尺寸
self.cls_token = nn.Parameter(torch.zeros(1, 1, num_features)) # 分类 token 196, 768 -> 197, 768
self.pos_embed = nn.Parameter(torch.zeros(1, self.num_patches + 1, num_features)) # 位置编码 197, 768 -> 197, 768
self.pos_drop = nn.Dropout(drop_rate) # 丢弃率
self.norm = norm_layer(self.num_features) # 归一化
self.dpr = [x.item() for x in torch.linspace(0, drop_path_rate, depth)] # 丢弃路径率
self.blocks = nn.Sequential(
*[
Block(
dim = num_features,
num_heads = num_heads,
mlp_radio = mlp_ratio,
qkv_bias = qkv_bias,
drop = drop_rate,
attn_drop = attn_drop_rate,
drop_path = self.dpr[i],
norm_layer = norm_layer,
act_layer = act_layer
)for i in range(depth)
]
)
self.head = nn.Linear(num_features, num_classes) if num_classes > 0 else nn.Identity()
def forward_features(self,x):
x = self.patch_embed(x)
cls_token = self.cls_token.expand(x.shape[0], -1, -1) # 将分类 token 扩展到与输入特征图相同的形状
x = torch.cat((cls_token, x), dim=1) # 将分类 token 与输入特征图拼接
cls_token_pos_embed = self.pos_embed[:, 0:1, :] # 分类 token 的位置编码
img_token_pos_embed = self.pos_embed[:, 1:, :] # [1, num_patches, num_features]
# 变成[1, H, W, C]
img_token_pos_embed = img_token_pos_embed.view(1, self.features_shape[0], self.features_shape[1], -1).permute(0, 3, 1, 2) # [1, C, H, W]
# 插值
img_token_pos_embed = F.interpolate(
img_token_pos_embed,
size=self.features_shape, # [H, W]
mode='bicubic',
align_corners=False
)
# 变回[1, num_patches, C]
img_token_pos_embed = img_token_pos_embed.permute(0, 2, 3, 1).reshape(1, -1, img_token_pos_embed.shape[1])
pos_embed = torch.cat((cls_token_pos_embed, img_token_pos_embed), dim=1) # 将分类 token 的位置编码与图像 token 的位置编码拼接
x = self.pos_drop(x + pos_embed) # 将位置编码与输入特征图相加
x = self.blocks(x)
x = self.norm(x)
return x[:, 0] # 返回分类 token 的特征
def forward(self, x):
x = self.forward_features(x)
x = self.head(x)
return x
至此我们完整的ViT便搭建完成了!
(六)实现数据加载代码(数据加载、loss、优化器)
数据集加载部分比较简答,不过多赘述,我的数据集结构及具体代码如下:
import os
from torch.utils.data import Dataset, DataLoader
from PIL import Image
import torchvision.transforms as transforms
class ViTDataset(Dataset):
def __init__(self, root, split, transform=None, target_transform=None, img_size=224):
super().__init__()
self.split = split
self.img_size = img_size # 图像大小
self.transform = transform if transform is not None else transforms.ToTensor()
self.target_transform = target_transform # 标签变换
# 构建数据集根目录
self.data_dir = os.path.join(root, split) # 训练集或测试集目录
# 获取所有类别
self.classes = sorted(os.listdir(self.data_dir))
self.class_to_idx = {cls_name: i for i, cls_name in enumerate(self.classes)}
# 收集所有图像文件路径和对应的标签
self.images = []
self.labels = []
for class_name in self.classes:
class_dir = os.path.join(self.data_dir, class_name)
if not os.path.isdir(class_dir):
continue
for img_name in os.listdir(class_dir):
if img_name.endswith(('.jpg', '.jpeg', '.png')):
img_path = os.path.join(class_dir, img_name)
self.images.append(img_path)
self.labels.append(self.class_to_idx[class_name])
print(f"加载了 {len(self.images)} 张图像用于{split}集,共{len(self.classes)}个类别")
def __len__(self):
return len(self.images)
def __getitem__(self, index):
# 获取图像路径和标签
img_path = self.images[index]
label = self.labels[index]
# 加载图像
image = Image.open(img_path).convert('RGB')
# 调整图像大小
image = image.resize((self.img_size, self.img_size), Image.Resampling.BILINEAR)
# 应用变换
image = self.transform(image)
if self.target_transform is not None:
label = self.target_transform(label)
return image, label
def ViTDataLoad(root, batch_size, num_workers, img_size):
# 创建训练数据集
train_dataset = ViTDataset(
root=root,
split='train', # 使用训练集划分
img_size=img_size
)
# 创建验证数据集
val_dataset = ViTDataset(
root=root,
split='val', # 使用验证集划分
img_size=img_size
)
# 创建训练数据加载器
train_loader = DataLoader(
train_dataset,
batch_size=batch_size,
shuffle=True, # 随机打乱数据
num_workers=num_workers, # 多线程加载
pin_memory=True, # 数据预加载到固定内存,加速GPU传输
drop_last=True # 丢弃最后不足一个批次的数据
)
# 创建验证数据加载器
val_loader = DataLoader(
val_dataset,
batch_size=batch_size,
shuffle=False, # 不打乱数据
num_workers=num_workers,
pin_memory=True
)
return train_loader, val_loader
(七)实现训练代码
接下来我们来完成我们的训练代码,我通过上一节定义的ViTDataLoad来加载训练和验证数据集,训练中我采用常用的交叉熵损失函数(CrossEntropyLoss)来衡量分类效果,优化器使用了更适合Transformer的AdamW,具体实现如下,不过多赘述:
from model.transformer_net import VisonTransformer
from dataset_load import ViTDataLoad
import torch
import torch.nn as nn
import torch.optim as optim
from tqdm import tqdm
import matplotlib.pyplot as plt
def train(
root="/home/xq/Working/dockertrain_test/input/timmdataset/african-wildlife", # 数据集根目录
img_size=224,
patch_size=16,
in_channels=3,
num_features=768,
depth=12,
num_heads=12,
mlp_ratio=4.0,
qkv_bias=True,
drop_rate=0.1,
attn_drop_rate=0.1,
drop_path_rate=0.1,
epochs=50,
batch_size=4,
num_workers=4,
lr=1e-4,
device=None
):
device = device or ("cuda" if torch.cuda.is_available() else "cpu")
# 数据加载
train_loader, val_loader = ViTDataLoad(root, batch_size, num_workers, img_size)
num_classes = len(train_loader.dataset.classes)
input_shape = (in_channels, img_size, img_size)
# 模型
model = VisonTransformer(
input_shape=input_shape,
patch_size=patch_size,
in_channels=in_channels,
num_classes=num_classes,
num_features=num_features,
depth=depth,
num_heads=num_heads,
mlp_ratio=mlp_ratio,
qkv_bias=qkv_bias,
drop_rate=drop_rate,
attn_drop_rate=attn_drop_rate,
drop_path_rate=drop_path_rate,
norm_layer=nn.LayerNorm,
act_layer=nn.GELU
).to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.AdamW(model.parameters(), lr=lr)
best_acc = 0
train_loss_list, val_loss_list = [], []
train_acc_list, val_acc_list = [], []
for epoch in range(epochs):
model.train()
total_loss, correct, total = 0, 0, 0
pbar = tqdm(train_loader, desc=f"Epoch {epoch+1}/{epochs}")
for images, labels in pbar:
images, labels = images.to(device), labels.to(device)
optimizer.zero_grad()
outputs = model(images)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
total_loss += loss.item() * images.size(0)
_, preds = outputs.max(1)
correct += preds.eq(labels).sum().item()
total += labels.size(0)
train_loss = total_loss / total
train_acc = correct / total
train_loss_list.append(train_loss)
train_acc_list.append(train_acc)
# 验证
model.eval()
val_loss, val_correct, val_total = 0, 0, 0
with torch.no_grad():
for images, labels in val_loader:
images, labels = images.to(device), labels.to(device)
outputs = model(images)
loss = criterion(outputs, labels)
val_loss += loss.item() * images.size(0)
_, preds = outputs.max(1)
val_correct += preds.eq(labels).sum().item()
val_total += labels.size(0)
val_loss = val_loss / val_total
val_acc = val_correct / val_total
val_loss_list.append(val_loss)
val_acc_list.append(val_acc)
print(f"Epoch {epoch+1}: Train Loss={train_loss:.4f}, Train Acc={train_acc:.4f}, Val Loss={val_loss:.4f}, Val Acc={val_acc:.4f}")
# 保存最优模型
if val_acc > best_acc:
best_acc = val_acc
torch.save(model.state_dict(), "best_vit.pth")
# 可视化loss和acc
plt.figure()
plt.plot(train_loss_list, label="Train Loss")
plt.plot(val_loss_list, label="Val Loss")
plt.legend()
plt.title("Loss Curve")
plt.savefig("loss_curve.png")
plt.figure()
plt.plot(train_acc_list, label="Train Acc")
plt.plot(val_acc_list, label="Val Acc")
plt.legend()
plt.title("Accuracy Curve")
plt.savefig("acc_curve.png")
print("训练完成,最优验证准确率:", best_acc)
if __name__ == "__main__":
train()
(八)实现验证代码
验证代码也比较简单,有PyTorch及深度学习基础的同学可以很快实现,故这里也不再赘述:
import torch
from model.transformer_net import VisonTransformer
import torchvision.transforms as transforms
from PIL import Image
import sys
import os
img_size = 224
patch_size = 16
in_channels = 3
num_features = 768
depth = 12
num_heads = 12
mlp_ratio = 4.0
qkv_bias = True
drop_rate = 0.1
attn_drop_rate = 0.1
drop_path_rate = 0.1
classes = ['cat', 'dog']
num_classes = len(classes)
input_shape = (in_channels, img_size, img_size)
def load_model(device):
model = VisonTransformer(
input_shape=input_shape,
patch_size=patch_size,
in_channels=in_channels,
num_classes=num_classes,
num_features=num_features,
depth=depth,
num_heads=num_heads,
mlp_ratio=mlp_ratio,
qkv_bias=qkv_bias,
drop_rate=drop_rate,
attn_drop_rate=attn_drop_rate,
drop_path_rate=drop_path_rate,
norm_layer=torch.nn.LayerNorm,
act_layer=torch.nn.GELU
).to(device)
model.load_state_dict(torch.load("best_vit.pth", map_location=device))
model.eval()
return model
def predict(img_path, model, device):
transform = transforms.Compose([
transforms.Resize((img_size, img_size)),
transforms.ToTensor(),
])
img = Image.open(img_path).convert('RGB')
img = transform(img).unsqueeze(0).to(device)
with torch.no_grad():
output = model(img)
pred = output.argmax(dim=1).item()
return classes[pred]
if __name__ == "__main__":
img_path = sys.argv[1]
if not os.path.exists(img_path):
print(f"图片不存在: {img_path}")
sys.exit(1)
device = "cuda" if torch.cuda.is_available() else "cpu"
model = load_model(device)
pred_class = predict(img_path, model, device)
print(f"图片 {img_path} 的预测类别为: {pred_class}")
三、ViT:在自定义数据集及CIFAR-10进行训练与测试
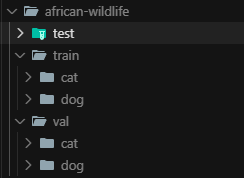
(一)自定义数据集
我们首先在我们自定义数据集上进行测试,请保证数据集格式为:
接着在训练代码中修改数据集路径并运行下述命令即可开始训练:
python3 train.py

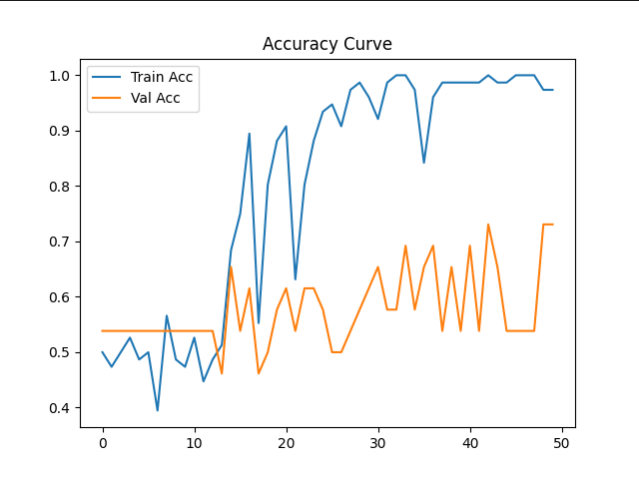
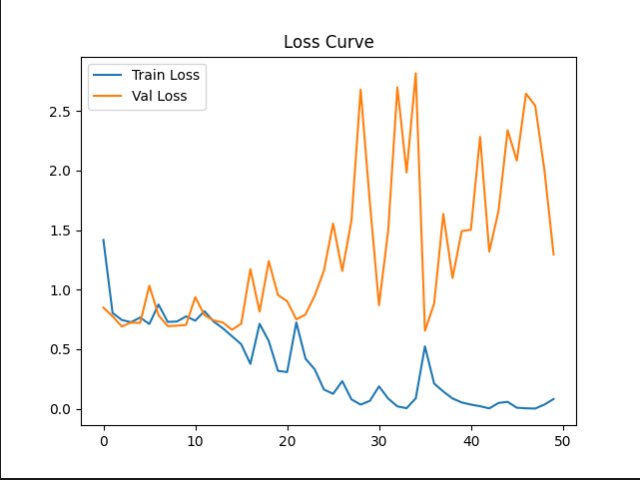
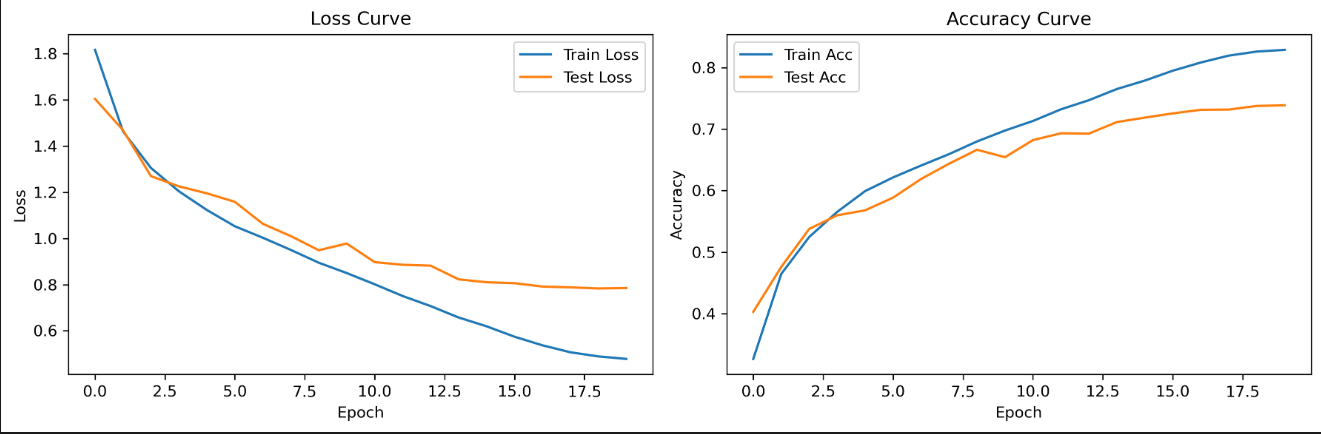
训练完成后文件内会有一个best_vit.pth以及两个训练的Acc及Loss图用于分析
接下来我们运行python3 predict.py [img_path]即可执行推理啦!
![]()
(二)CIFAR-10数据集
在完成上述自定义数据集之后我们便可以继续尝试CIFAR-10啦!我们首先来下载我们的CIFAR-10数据集,CIFAR-10数据集已经集成进了Torch,因此我们可以使用PyTorch接口直接下载,具体下载方式如下,不过多赘述:
# CIFAR-10全量
import torchvision.datasets as datasets
train_dataset = datasets.CIFAR10(root='./data', train=True, download=True)
test_dataset = datasets.CIFAR10(root='./data', train=False, download=True)

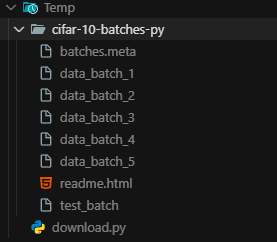
由于我们下载下来的CIFAR-10数据集格式如下(data_batch_1 ~ data_batch_5:训练数据(每个10,000张图像),test_batch:测试数据(10,000张图像),batches.meta:元数据文件(包含类别名称等信息)),因此我们需要对我们的dataset_load.py代码进行修改以适配我们的CIFAR-10数据集
import os
import pickle
import numpy as np
import torch
from torch.utils.data import Dataset, DataLoader
from PIL import Image
import torchvision.transforms as transforms
class CIFAR10Dataset(Dataset):
def __init__(self, root, train=True, transform=None, target_transform=None):
super().__init__()
self.root = root
self.train = train
self.transform = transform
self.target_transform = target_transform
# CIFAR-10类别名称
self.classes = [
'airplane', 'automobile', 'bird', 'cat', 'deer',
'dog', 'frog', 'horse', 'ship', 'truck'
]
self.class_to_idx = {cls_name: i for i, cls_name in enumerate(self.classes)}
self.data = []
self.targets = []
if self.train:
for i in range(1, 6):
batch_file = os.path.join(root, f'data_batch_{i}')
with open(batch_file, 'rb') as f:
batch_data = pickle.load(f, encoding='bytes')
self.data.append(batch_data[b'data'])
self.targets.extend(batch_data[b'labels'])
self.data = np.vstack(self.data)
else:
test_file = os.path.join(root, 'test_batch')
with open(test_file, 'rb') as f:
test_data = pickle.load(f, encoding='bytes')
self.data = test_data[b'data']
self.targets = test_data[b'labels']
# 将数据reshape为图像格式 (N, 32, 32, 3)
self.data = self.data.reshape(-1, 3, 32, 32).transpose(0, 2, 3, 1)
print(f"加载了 {len(self.data)} 张CIFAR-10图像用于{'训练' if train else '测试'},共{len(self.classes)}个类别")
def __len__(self):
return len(self.data)
def __getitem__(self, index):
img = self.data[index]
target = self.targets[index]
img = Image.fromarray(img)
if self.transform is not None:
img = self.transform(img)
if self.target_transform is not None:
target = self.target_transform(target)
return img, target
def CIFAR10DataLoad(root, batch_size, num_workers=4, img_size=224):
train_transform = transforms.Compose([
transforms.Resize((img_size, img_size)),
transforms.RandomHorizontalFlip(p=0.5),
transforms.RandomRotation(10),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])
test_transform = transforms.Compose([
transforms.Resize((img_size, img_size)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])
# 创建数据集
train_dataset = CIFAR10Dataset(
root=root,
train=True,
transform=train_transform
)
test_dataset = CIFAR10Dataset(
root=root,
train=False,
transform=test_transform
)
# 创建数据加载器
train_loader = DataLoader(
train_dataset,
batch_size=batch_size,
shuffle=True,
num_workers=num_workers,
pin_memory=True,
drop_last=True
)
test_loader = DataLoader(
test_dataset,
batch_size=batch_size,
shuffle=False,
num_workers=num_workers,
pin_memory=True
)
return train_loader, test_loader
if __name__ == "__main__":
# 测试数据加载器
root = "/home/xq/Temp/cifar-10-batches-py"
train_loader, test_loader = CIFAR10DataLoad(root, batch_size=32)
# 测试一个batch
for images, labels in train_loader:
print(f"图像batch形状: {images.shape}")
print(f"标签batch形状: {labels.shape}")
print(f"标签范围: {labels.min()} - {labels.max()}")
break
接着修改我们训练代码,主要修改数据集路径、数据加载器的调用即可:

python3 train.py

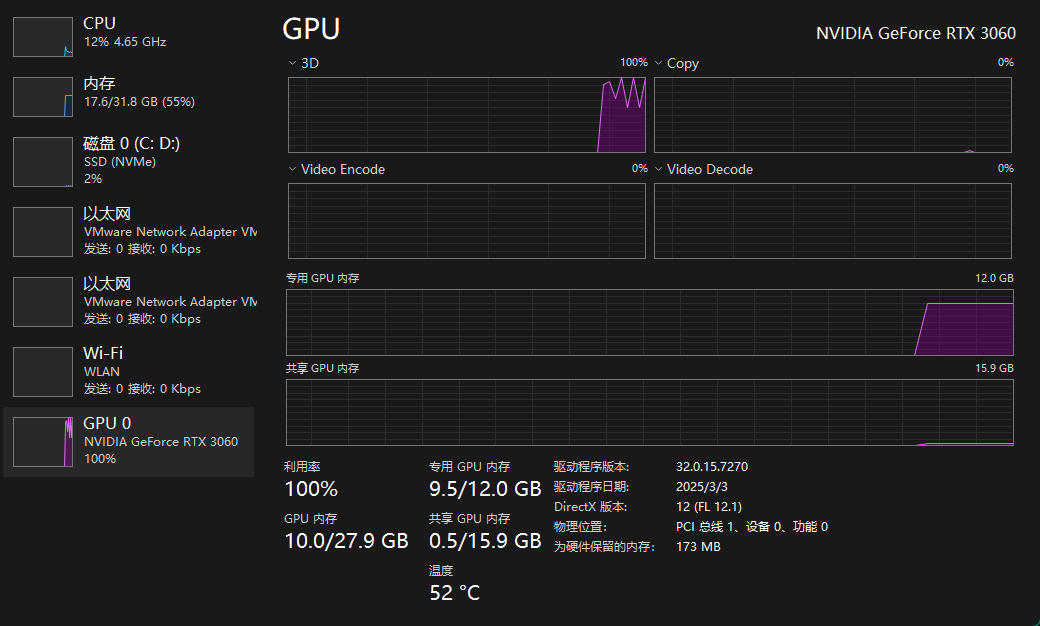
由于CIFAR-10数据集比较大,训练速度较慢,我们耐心等待即可,训练完成后运行如下命令即可执行推理:
# 单个预测
python3 predict_cifar10.py <图片路径>
# Top-K预测
python3 predict_cifar10.py <图片路径> --top-k 3
四、ViT在RDKX5和RDK S100上的部署
(一)RDK X5
我们首先来介绍ViT在RDKX5上的部署,但由于X5对Transformer的支持不是很足所以无法做到所有算子均运行在BPU上(我菜…),如果大家有更好的优化或者部署方案欢迎大家在评论区或者私聊我,谢谢大家啦!
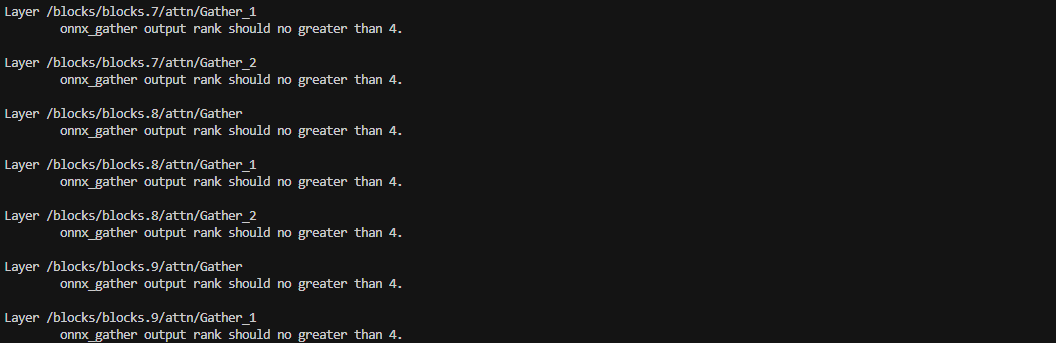
我们首先运行算子检查,这时候你会发现日志中报了一堆Gather算子的错,类似于下面这样:
hb_mapper checker --model-type onnx --march bayes-e --model /path/to/your.onnx
### 出现大量如下信息
onnx_gather output rank should no greater than 4.
| Gather | BPU加速 | 1. input/output/indices 的rank都要小于等于4。 2. indices支持: - indices是feature(其他op输出)时,type约束仅支持int32类型。 - indices是weight(模型保存的常量)时,type约束支持int32和int64类型。 | from_type支持: - input:type约束支持: float,int64,int32,int8,uint64,uint32,uint8。 - indices:type约束支持int32, int64。 to_type支持:type约束支持: float,int64,int32,int8,uint64,uint32,uint8。 |
|---|
这是因为RDKX5的BPU目前对于Gather加速有如下约束条件,也就是输入/输出/索引的rank都要小于等于4维,我们之前实现的网络不满足加速的要求,在以下SelfAttention中产生了五维张量,因此我们需要将这个实现修改一下,具体实现如下:
qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2,0,3,1,4)
# 将SelfAttention中的如上实现替换为以下实现
class SelfAttention(nn.Module):
def __init__(self, dim, num_heads, qkv_bias=False, attn_drop_rate=0.0, proj_drop_rate=0.0):
super().__init__()
self.num_heads = num_heads
self.head_dim = dim // num_heads
self.scale = self.head_dim ** -0.5
# 分别定义Q、K、V的线性层
self.q_linear = nn.Linear(dim, dim, bias=qkv_bias)
self.k_linear = nn.Linear(dim, dim, bias=qkv_bias)
self.v_linear = nn.Linear(dim, dim, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop_rate)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop_rate)
def forward(self, x):
B, N, C = x.shape
# 分别计算Q、K、V
q = self.q_linear(x).reshape(B, N, self.num_heads, self.head_dim).permute(0, 2, 1, 3)
k = self.k_linear(x).reshape(B, N, self.num_heads, self.head_dim).permute(0, 2, 1, 3)
v = self.v_linear(x).reshape(B, N, self.num_heads, self.head_dim).permute(0, 2, 1, 3)
# 计算注意力
attn = torch.matmul(q, k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
# 应用注意力权重
x = torch.matmul(attn, v)
x = x.transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
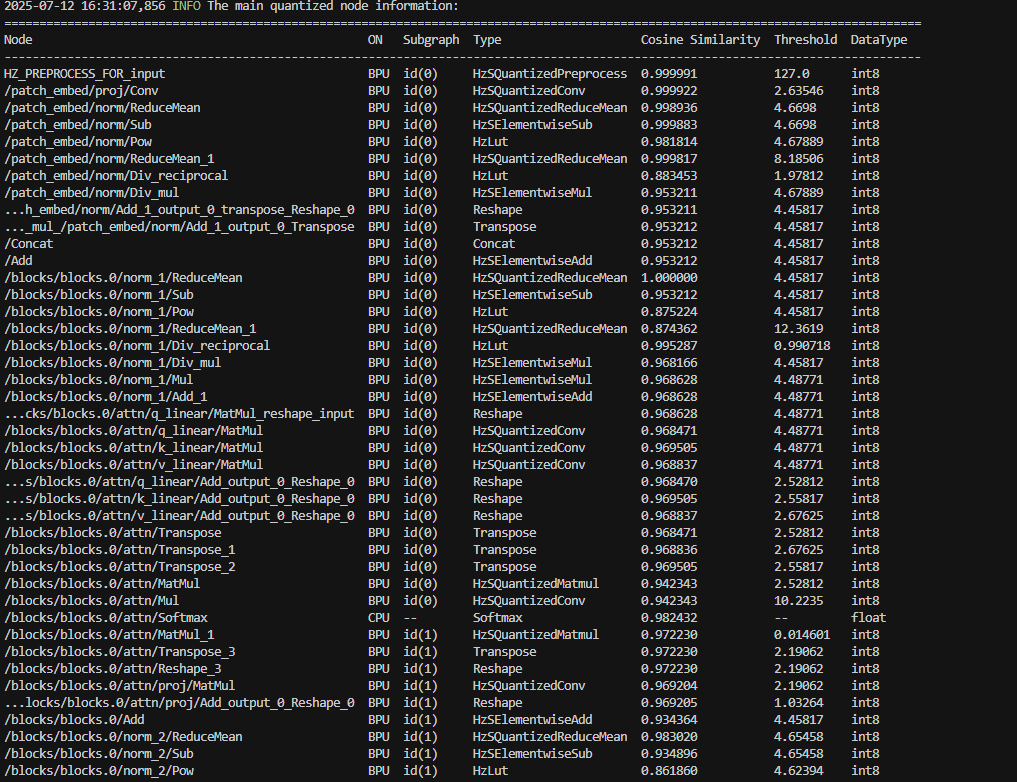
接着我们重新训练导出后检查会发现原来的Gather的提示已经没有啦,但是仍然有很多Softmax算子在CPU上但是没啥太好的办法了如果强行放到BPU上的话会逐层掉点无法挽救(如果有大佬有更好的方法求求教教我),我们接着进行模型的量化,参考的yaml如下:
model_parameters:
onnx_model: './vit_cifar10_batch1_optimized.onnx'
march: "bayes-e"
layer_out_dump: False
working_dir: 'vit_cifar10_batch1_optimized'
output_model_file_prefix: 'vit_cifar10_batch1_optimized'
input_parameters:
input_name: ""
input_type_rt: 'nv12'
input_type_train: 'rgb'
input_layout_train: 'NCHW'
norm_type: 'data_mean_and_scale'
mean_value: 123.675 116.28 103.53
scale_value: 0.017124753831663668 0.017507003891050351 0.017429193899782137
calibration_parameters:
cal_data_dir: './cali_img'
cal_data_type: 'float32'
compiler_parameters:
compile_mode: 'latency'
debug: False
optimize_level: 'O3'
接着我们运行如下命令即可:
hb_mapper makertbin -c convert.yaml --model-type onnx
参考的编译日志如下,可以看到余弦相似度在逐层下降:
得到了编译后的模型之后我们便可以使用如下的代码部署测试:
// 注意: 此程序在RDK板端端运行
// Attention: This program runs on RDK board.
// D-Robotics *.bin 模型路径
// Path of D-Robotics *.bin model.
#define MODEL_PATH "vit_cifar10_batch1_optimized.bin"
// 推理使用的测试图片路径
// Path of the test image used for inference.
#define TEST_IMG_PATH ""
// 模型的类别数量, CIFAR-10有10个类别
// Number of classes in the model, CIFAR-10 has 10 classes
#define CLASSES_NUM 10
// C/C++ Standard Librarys
#include <iostream>
#include <vector>
#include <algorithm>
#include <chrono>
#include <iomanip>
// Third Party Librarys
#include <opencv2/opencv.hpp>
// RDK BPU libDNN API
#include "dnn/hb_dnn.h"
#include "dnn/hb_dnn_ext.h"
#include "dnn/plugin/hb_dnn_layer.h"
#include "dnn/plugin/hb_dnn_plugin.h"
#include "dnn/hb_sys.h"
#define RDK_CHECK_SUCCESS(value, errmsg) \
do \
{ \
auto ret_code = value; \
if (ret_code != 0) \
{ \
std::cout << "[ERROR] " << __FILE__ << ":" << __LINE__ << std::endl; \
std::cout << errmsg << ", error code:" << ret_code << std::endl; \
return ret_code; \
} \
} while (0);
// CIFAR-10 类别名称
// CIFAR-10 class names
std::vector<std::string> cifar10_names = {
"airplane", "automobile", "bird", "cat", "deer",
"dog", "frog", "horse", "ship", "truck"
};
int main()
{
// 0. 加载bin模型
auto begin_time = std::chrono::system_clock::now();
hbPackedDNNHandle_t packed_dnn_handle;
const char *model_file_name = MODEL_PATH;
RDK_CHECK_SUCCESS(
hbDNNInitializeFromFiles(&packed_dnn_handle, &model_file_name, 1),
"hbDNNInitializeFromFiles failed");
std::cout << "\033[31m Load D-Robotics Quantize model time = " << std::fixed << std::setprecision(2) << std::chrono::duration_cast<std::chrono::microseconds>(std::chrono::system_clock::now() - begin_time).count() / 1000.0 << " ms\033[0m" << std::endl;
// 1. 打印相关版本信息
std::cout << "[INFO] OpenCV Version: " << CV_VERSION << std::endl;
std::cout << "[INFO] MODEL_PATH: " << MODEL_PATH << std::endl;
std::cout << "[INFO] CLASSES_NUM: " << CLASSES_NUM << std::endl;
// 2. 打印模型信息
// 2.1 模型名称
const char **model_name_list;
int model_count = 0;
RDK_CHECK_SUCCESS(
hbDNNGetModelNameList(&model_name_list, &model_count, packed_dnn_handle),
"hbDNNGetModelNameList failed");
// 如果这个bin模型有多个打包,则只使用第一个,一般只有一个
if (model_count > 1)
{
std::cout << "This model file have more than 1 model, only use model 0.";
}
const char *model_name = model_name_list[0];
std::cout << "[model name]: " << model_name << std::endl;
// 2.2 获得Packed模型的第一个模型的handle
hbDNNHandle_t dnn_handle;
RDK_CHECK_SUCCESS(
hbDNNGetModelHandle(&dnn_handle, packed_dnn_handle, model_name),
"hbDNNGetModelHandle failed");
// 2.3 模型输入检查
int32_t input_count = 0;
RDK_CHECK_SUCCESS(
hbDNNGetInputCount(&input_count, dnn_handle),
"hbDNNGetInputCount failed");
hbDNNTensorProperties input_properties;
RDK_CHECK_SUCCESS(
hbDNNGetInputTensorProperties(&input_properties, dnn_handle, 0),
"hbDNNGetInputTensorProperties failed");
// 2.3.1 ViT模型应该为单输入
if (input_count > 1)
{
std::cout << "Your Model have more than 1 input, please check!" << std::endl;
return -1;
}
// 2.3.2 打印输入tensor类型
std::cout << "input tensor type: " << input_properties.tensorType << std::endl;
// 2.3.3 打印输入tensor布局
if (input_properties.tensorLayout == HB_DNN_LAYOUT_NCHW)
{
std::cout << "input tensor layout: HB_DNN_LAYOUT_NCHW" << std::endl;
}
else if (input_properties.tensorLayout == HB_DNN_LAYOUT_NHWC)
{
std::cout << "input tensor layout: HB_DNN_LAYOUT_NHWC" << std::endl;
}
else
{
std::cout << "input tensor layout: " << input_properties.tensorLayout << std::endl;
}
// 2.3.4 获取输入维度信息
int32_t input_H = 0, input_W = 0, input_C = 0;
if (input_properties.validShape.numDimensions == 4)
{
if (input_properties.tensorLayout == HB_DNN_LAYOUT_NCHW)
{
input_C = input_properties.validShape.dimensionSize[1];
input_H = input_properties.validShape.dimensionSize[2];
input_W = input_properties.validShape.dimensionSize[3];
}
else if (input_properties.tensorLayout == HB_DNN_LAYOUT_NHWC)
{
input_H = input_properties.validShape.dimensionSize[1];
input_W = input_properties.validShape.dimensionSize[2];
input_C = input_properties.validShape.dimensionSize[3];
}
else
{
// 默认按NCHW处理
input_C = input_properties.validShape.dimensionSize[1];
input_H = input_properties.validShape.dimensionSize[2];
input_W = input_properties.validShape.dimensionSize[3];
}
std::cout << "input tensor valid shape: (" << input_properties.validShape.dimensionSize[0];
std::cout << ", " << input_C;
std::cout << ", " << input_H;
std::cout << ", " << input_W << ")" << std::endl;
}
else
{
std::cout << "input tensor validShape.numDimensions is not 4, please check!" << std::endl;
return -1;
}
// 2.4 模型输出检查
int32_t output_count = 0;
RDK_CHECK_SUCCESS(
hbDNNGetOutputCount(&output_count, dnn_handle),
"hbDNNGetOutputCount failed");
std::cout << "Output count: " << output_count << std::endl;
for (int i = 0; i < output_count; i++)
{
hbDNNTensorProperties output_properties;
RDK_CHECK_SUCCESS(
hbDNNGetOutputTensorProperties(&output_properties, dnn_handle, i),
"hbDNNGetOutputTensorProperties failed");
std::cout << "output[" << i << "] ";
std::cout << "valid shape: (";
for (int j = 0; j < output_properties.validShape.numDimensions; j++)
{
std::cout << output_properties.validShape.dimensionSize[j];
if (j < output_properties.validShape.numDimensions - 1) std::cout << ", ";
}
std::cout << "), ";
if (output_properties.quantiType == SHIFT)
std::cout << "QuantiType: SHIFT" << std::endl;
if (output_properties.quantiType == SCALE)
std::cout << "QuantiType: SCALE" << std::endl;
if (output_properties.quantiType == NONE)
std::cout << "QuantiType: NONE" << std::endl;
}
// 3. 利用OpenCV准备输入数据
// 3.1 利用OpenCV读取图像
cv::Mat img = cv::imread(TEST_IMG_PATH);
if (img.empty())
{
std::cout << "Failed to read image: " << TEST_IMG_PATH << std::endl;
return -1;
}
std::cout << "img path: " << TEST_IMG_PATH << std::endl;
std::cout << "img (rows, cols, channels): (";
std::cout << img.rows << ", ";
std::cout << img.cols << ", ";
std::cout << img.channels() << ")" << std::endl;
// 3.2 前处理:调整尺寸到模型输入尺寸
begin_time = std::chrono::system_clock::now();
cv::Mat resize_img;
cv::Size targetSize(input_W, input_H);
cv::resize(img, resize_img, targetSize);
std::cout << "\033[31m pre process (Resize) time = " << std::fixed << std::setprecision(2) << std::chrono::duration_cast<std::chrono::microseconds>(std::chrono::system_clock::now() - begin_time).count() / 1000.0 << " ms\033[0m" << std::endl;
// 3.3 准备输入tensor数据
begin_time = std::chrono::system_clock::now();
hbDNNTensor input;
input.properties = input_properties;
// 分配内存
int input_size = input_H * input_W * input_C;
if (input_properties.tensorType == HB_DNN_IMG_TYPE_NV12)
{
input_size = input_H * input_W * 3 / 2; // NV12格式
hbSysAllocCachedMem(&input.sysMem[0], input_size);
// 转换为NV12格式
cv::Mat img_nv12;
cv::Mat yuv_mat;
cv::cvtColor(resize_img, yuv_mat, cv::COLOR_BGR2YUV_I420);
uint8_t *yuv = yuv_mat.ptr<uint8_t>();
img_nv12 = cv::Mat(input_H * 3 / 2, input_W, CV_8UC1);
uint8_t *ynv12 = img_nv12.ptr<uint8_t>();
int uv_height = input_H / 2;
int uv_width = input_W / 2;
int y_size = input_H * input_W;
memcpy(ynv12, yuv, y_size);
uint8_t *nv12 = ynv12 + y_size;
uint8_t *u_data = yuv + y_size;
uint8_t *v_data = u_data + uv_height * uv_width;
for (int i = 0; i < uv_width * uv_height; i++)
{
*nv12++ = *u_data++;
*nv12++ = *v_data++;
}
memcpy(input.sysMem[0].virAddr, ynv12, input_size);
}
else
{
// RGB或其他格式
hbSysAllocCachedMem(&input.sysMem[0], input_size);
// 将图像数据复制到输入tensor
cv::Mat float_img;
resize_img.convertTo(float_img, CV_32F, 1.0/255.0); // 归一化到[0,1]
if (input_properties.tensorLayout == HB_DNN_LAYOUT_NCHW)
{
// NCHW格式
std::vector<cv::Mat> channels;
cv::split(float_img, channels);
float* input_data = reinterpret_cast<float*>(input.sysMem[0].virAddr);
for (int c = 0; c < input_C; c++)
{
memcpy(input_data + c * input_H * input_W,
channels[2-c].ptr<float>(),
input_H * input_W * sizeof(float)); // BGR to RGB
}
}
else
{
// NHWC格式
cv::cvtColor(float_img, float_img, cv::COLOR_BGR2RGB); // BGR to RGB
memcpy(input.sysMem[0].virAddr, float_img.ptr<float>(), input_size * sizeof(float));
}
}
hbSysFlushMem(&input.sysMem[0], HB_SYS_MEM_CACHE_CLEAN);
std::cout << "\033[31m prepare input data time = " << std::fixed << std::setprecision(2) << std::chrono::duration_cast<std::chrono::microseconds>(std::chrono::system_clock::now() - begin_time).count() / 1000.0 << " ms\033[0m" << std::endl;
// 4. 准备模型输出数据的空间
hbDNNTensor *output = new hbDNNTensor[output_count];
for (int i = 0; i < output_count; i++)
{
hbDNNTensorProperties &output_properties = output[i].properties;
hbDNNGetOutputTensorProperties(&output_properties, dnn_handle, i);
int out_aligned_size = output_properties.alignedByteSize;
hbSysMem &mem = output[i].sysMem[0];
hbSysAllocCachedMem(&mem, out_aligned_size);
}
// 5. 推理模型
begin_time = std::chrono::system_clock::now();
hbDNNTaskHandle_t task_handle = nullptr;
hbDNNInferCtrlParam infer_ctrl_param;
HB_DNN_INITIALIZE_INFER_CTRL_PARAM(&infer_ctrl_param);
hbDNNInfer(&task_handle, &output, &input, dnn_handle, &infer_ctrl_param);
// 6. 等待任务结束
hbDNNWaitTaskDone(task_handle, 0);
std::cout << "\033[31m forward time = " << std::fixed << std::setprecision(2) << std::chrono::duration_cast<std::chrono::microseconds>(std::chrono::system_clock::now() - begin_time).count() / 1000.0 << " ms\033[0m" << std::endl;
// 7. ViT分类后处理
begin_time = std::chrono::system_clock::now();
// 7.1 获取输出数据
hbSysFlushMem(&(output[0].sysMem[0]), HB_SYS_MEM_CACHE_INVALIDATE);
// 获取输出维度
hbDNNTensorProperties &output_properties = output[0].properties;
int output_size = 1;
for (int i = 0; i < output_properties.validShape.numDimensions; i++)
{
output_size *= output_properties.validShape.dimensionSize[i];
}
std::vector<float> predictions(CLASSES_NUM);
if (output_properties.quantiType == NONE)
{
// 浮点输出
float* output_data = reinterpret_cast<float*>(output[0].sysMem[0].virAddr);
for (int i = 0; i < CLASSES_NUM && i < output_size; i++)
{
predictions[i] = output_data[i];
}
}
else if (output_properties.quantiType == SCALE)
{
// 量化输出,需要反量化
int32_t* output_data = reinterpret_cast<int32_t*>(output[0].sysMem[0].virAddr);
float* scale_data = reinterpret_cast<float*>(output_properties.scale.scaleData);
for (int i = 0; i < CLASSES_NUM && i < output_size; i++)
{
predictions[i] = float(output_data[i]) * scale_data[i];
}
}
// 7.2 Softmax计算
float max_val = *std::max_element(predictions.begin(), predictions.end());
float sum = 0.0f;
for (int i = 0; i < CLASSES_NUM; i++)
{
predictions[i] = std::exp(predictions[i] - max_val);
sum += predictions[i];
}
for (int i = 0; i < CLASSES_NUM; i++)
{
predictions[i] /= sum;
}
// 7.3 找到最高分数的类别
int max_class = std::max_element(predictions.begin(), predictions.end()) - predictions.begin();
float max_score = predictions[max_class];
std::cout << "\033[31m Post Process time = " << std::fixed << std::setprecision(2) << std::chrono::duration_cast<std::chrono::microseconds>(std::chrono::system_clock::now() - begin_time).count() / 1000.0 << " ms\033[0m" << std::endl;
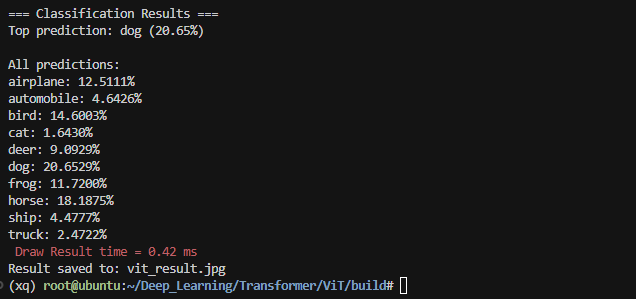
// 8. 打印分类结果
std::cout << "\n=== Classification Results ===" << std::endl;
std::cout << "Top prediction: " << cifar10_names[max_class] << " (" << std::fixed << std::setprecision(2) << max_score * 100 << "%)" << std::endl;
std::cout << "\nAll predictions:" << std::endl;
for (int i = 0; i < CLASSES_NUM; i++)
{
std::cout << cifar10_names[i] << ": " << std::fixed << std::setprecision(4) << predictions[i] * 100 << "%" << std::endl;
}
// 9. 释放任务
hbDNNReleaseTask(task_handle);
// 10. 释放内存
hbSysFreeMem(&(input.sysMem[0]));
for (int i = 0; i < output_count; i++)
hbSysFreeMem(&(output[i].sysMem[0]));
delete[] output;
// 11. 释放模型
hbDNNRelease(packed_dnn_handle);
return 0;
}
编译之后的运行结果如下:
mkdir build && cd build
cmake .. && make
./main
···
(二)RDK S100
接下来我们开始实现在RDKS100上的部署,首先确保你安装了S100的Docker工具链或者是自行配置好了开发环境,S100上的转换和X5没有太大区别,只不过导出onnx模型的时候我们可以选择导出opset=19啦,在配置好校准数据后我们便可以使用如下命令开始转换啦!
hb_compile -c convert.yaml
model_parameters:
onnx_model: './vit_cifar10_batch1_optimized.onnx'
march: "nash-e"
layer_out_dump: False
working_dir: 'vit_cifar10_batch1_optimized'
output_model_file_prefix: 'vit_cifar10_batch1_optimized'
input_parameters:
input_name: ""
input_type_rt: 'nv12'
input_type_train: 'rgb'
input_layout_train: 'NCHW'
norm_type: 'data_mean_and_scale'
mean_value: 123.675,116.28,103.53
scale_value: 0.017124753831663668,0.017507003891050351,0.017429193899782137
calibration_parameters:
cal_data_dir: '../../Dataset/cifar-10-batches-py/calis/'
cal_data_type: 'float32'
compiler_parameters:
compile_mode: 'latency'
debug: False
optimize_level: 'O2'
参考的编译日志如下:
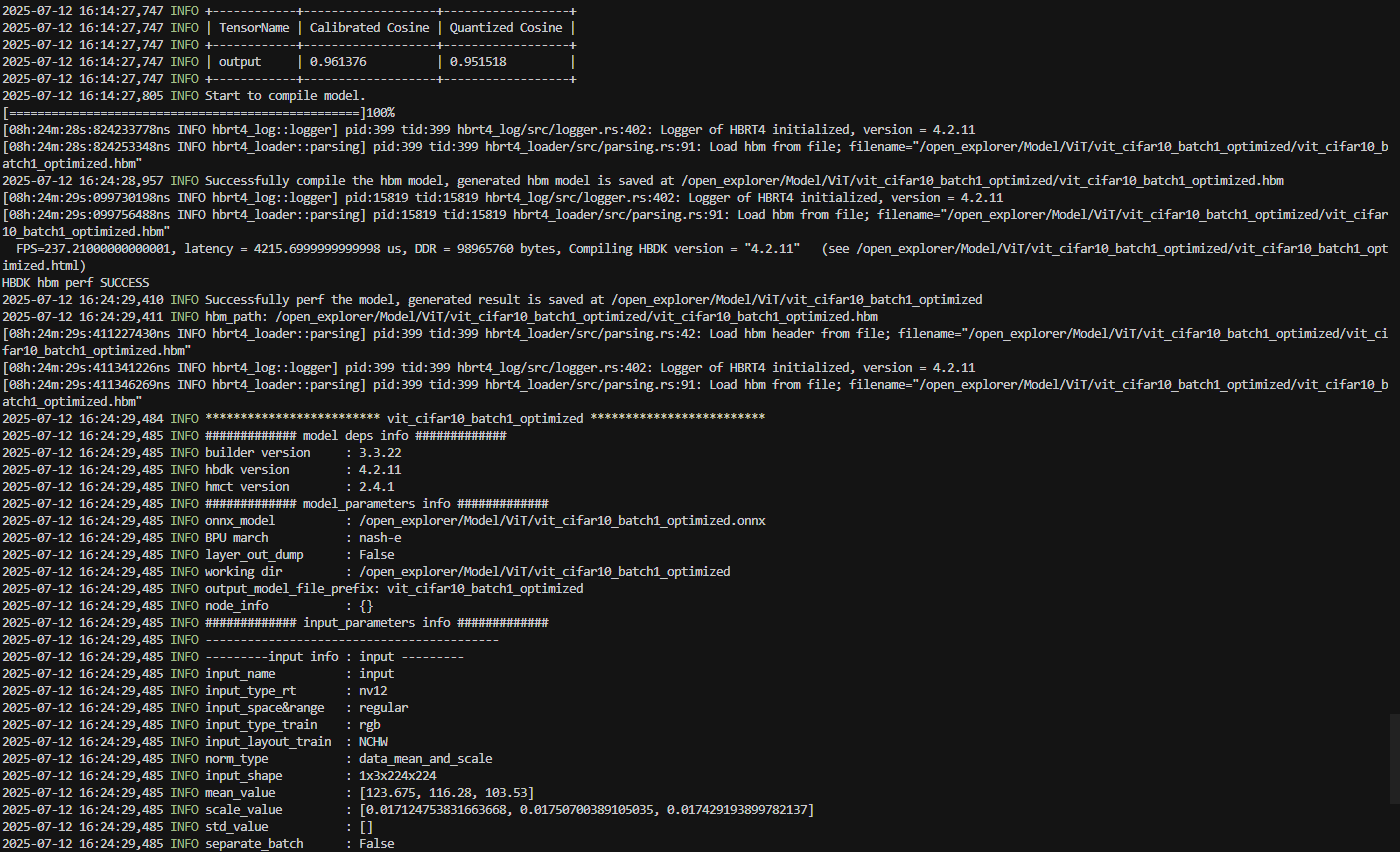
得到了编译后的模型之后我们便可以使用如下的代码部署测试:
// 注意: 此程序在RDK S100板端运行
// Attention: This program runs on RDK S100 board.
// D-Robotics S100 ViT *.hbm 模型路径
// Path of D-Robotics S100 ViT *.hbm model.
#define MODEL_PATH "vit_cifar10_batch1_optimized.hbm"
// 推理使用的测试图片路径
// Path of the test image used for inference.
#define TEST_IMG_PATH ""
// 前处理方式选择, 0:Resize, 1:Center Crop
// Preprocessing method selection, 0: Resize, 1: Center Crop
#define RESIZE_TYPE 0
#define CENTER_CROP_TYPE 1
#define PREPROCESS_TYPE RESIZE_TYPE
// 模型输入尺寸 (ViT通常使用224x224, CIFAR-10可能是32x32)
// Model input size (ViT typically uses 224x224, CIFAR-10 may be 32x32)
#define INPUT_HEIGHT 224
#define INPUT_WIDTH 224
// 模型的类别数量 (ImageNet 1000类, CIFAR-10 10类)
// Number of classes in the model (ImageNet 1000 classes, CIFAR-10 10 classes)
#define CLASSES_NUM 10
// 分类结果的Top-K数量
// Top-K number for classification results
#define TOP_K 5
// C/C++ Standard Libraries
#include <iostream>
#include <vector>
#include <algorithm>
#include <chrono>
#include <cmath>
#include <iomanip>
// Third Party Libraries
#include <opencv2/opencv.hpp>
#include <opencv2/dnn/dnn.hpp>
// RDK S100 UCP API
#include "hobot/dnn/hb_dnn.h"
#include "hobot/hb_ucp.h"
#include "hobot/hb_ucp_sys.h"
#define RDK_CHECK_SUCCESS(value, errmsg) \
do \
{ \
auto ret_code = value; \
if (ret_code != 0) \
{ \
std::cout << "[ERROR] " << __FILE__ << ":" << __LINE__ << std::endl; \
std::cout << errmsg << ", error code:" << ret_code << std::endl; \
return ret_code; \
} \
} while (0);
// CIFAR-10类别名称
std::vector<std::string> imagenet_classes = {
"airplane", "automobile", "bird", "cat", "deer",
"dog", "frog", "horse", "ship", "truck"
};
// Softmax函数
void softmax(float* input, float* output, int size) {
float max_val = *std::max_element(input, input + size);
float sum = 0.0f;
for (int i = 0; i < size; i++) {
output[i] = std::exp(input[i] - max_val);
sum += output[i];
}
for (int i = 0; i < size; i++) {
output[i] /= sum;
}
}
int main()
{
// Step 0: 加载S100 hbm模型
// Step 0: Load S100 hbm model
auto begin_time = std::chrono::system_clock::now();
hbDNNPackedHandle_t packed_dnn_handle;
const char *model_file_name = MODEL_PATH;
RDK_CHECK_SUCCESS(
hbDNNInitializeFromFiles(&packed_dnn_handle, &model_file_name, 1),
"hbDNNInitializeFromFiles failed");
std::cout << "\033[31m Load D-Robotics S100 Quantize model time = " << std::fixed << std::setprecision(2)
<< std::chrono::duration_cast<std::chrono::microseconds>(std::chrono::system_clock::now() - begin_time).count() / 1000.0
<< " ms\033[0m" << std::endl;
// Step 1: 打印基本信息
// Step 1: Print basic information
std::cout << "[INFO] OpenCV Version: " << CV_VERSION << std::endl;
std::cout << "[INFO] MODEL_PATH: " << MODEL_PATH << std::endl;
std::cout << "[INFO] CLASSES_NUM: " << CLASSES_NUM << std::endl;
std::cout << "[INFO] TOP_K: " << TOP_K << std::endl;
std::cout << "[INFO] INPUT_HEIGHT: " << INPUT_HEIGHT << std::endl;
std::cout << "[INFO] INPUT_WIDTH: " << INPUT_WIDTH << std::endl;
// Step 2: 获取模型句柄
// Step 2: Get model handle
const char **model_name_list;
int model_count = 0;
RDK_CHECK_SUCCESS(
hbDNNGetModelNameList(&model_name_list, &model_count, packed_dnn_handle),
"hbDNNGetModelNameList failed");
if (model_count > 1) {
std::cout << "This model file have more than 1 model, only use model 0." << std::endl;
}
const char *model_name = model_name_list[0];
std::cout << "[model name]: " << model_name << std::endl;
hbDNNHandle_t dnn_handle;
RDK_CHECK_SUCCESS(
hbDNNGetModelHandle(&dnn_handle, packed_dnn_handle, model_name),
"hbDNNGetModelHandle failed");
// Step 3: 检查模型输入
// Step 3: Check model input
int32_t input_count = 0;
RDK_CHECK_SUCCESS(
hbDNNGetInputCount(&input_count, dnn_handle),
"hbDNNGetInputCount failed");
if (input_count < 1) {
std::cout << "S100 ViT model should have at least 1 input, but got " << input_count << std::endl;
return -1;
} else if (input_count > 1) {
std::cout << "S100 ViT model has " << input_count << " inputs, using first input for inference" << std::endl;
}
hbDNNTensorProperties input_properties;
RDK_CHECK_SUCCESS(
hbDNNGetInputTensorProperties(&input_properties, dnn_handle, 0),
"hbDNNGetInputTensorProperties failed");
// 检测输入格式
std::cout << "✓ input tensor type: " << input_properties.tensorType << std::endl;
// 检测输入格式是否为NV12 (type 3)
if (input_properties.tensorType != 3) {
std::cout << "[ERROR] This program only supports NV12 input (type 3), but got type: " << input_properties.tensorType << std::endl;
return -1;
}
// 检测输入tensor布局为NCHW
if (input_properties.validShape.numDimensions == 4) {
// NCHW布局,H和W应该在维度1和2位置,且通道数应该为1
int32_t channels = input_properties.validShape.dimensionSize[3];
if (channels != 1) {
std::cout << "[ERROR] This program expects NCHW layout with 1 channel, but got " << channels << " channels" << std::endl;
return -1;
}
std::cout << "✓ input tensor layout: NCHW (verified)" << std::endl;
} else {
std::cout << "[ERROR] Expected 4D input tensor for NCHW layout, but got " << input_properties.validShape.numDimensions << "D" << std::endl;
return -1;
}
// 获取输入尺寸
int32_t input_H, input_W;
if (input_properties.validShape.numDimensions == 4) {
input_H = input_properties.validShape.dimensionSize[1];
input_W = input_properties.validShape.dimensionSize[2];
std::cout << "✓ input tensor valid shape: ("
<< input_properties.validShape.dimensionSize[0] << ", "
<< input_H << ", " << input_W << ", "
<< input_properties.validShape.dimensionSize[3] << ")" << std::endl;
} else {
std::cout << "S100 ViT model input should be 4D" << std::endl;
return -1;
}
// Step 4: 检查模型输出 - S100 YOLO 按照Readme导出后应该有6个输出
// Step 4: Check model output - S100 YOLO should have 6 outputs according to Readme
int32_t output_count = 0;
RDK_CHECK_SUCCESS(
hbDNNGetOutputCount(&output_count, dnn_handle),
"hbDNNGetOutputCount failed");
if (output_count != 1) {
std::cout << "S100 ViT model should have 1 output, but got " << output_count << std::endl;
return -1;
}
std::cout << "✓ S100 ViT model has 1 output" << std::endl;
// 打印输出信息并获取正确的输出顺序
std::cout << "\033[32m-> output tensors\033[0m" << std::endl;
for (int i = 0; i < 1; i++) {
hbDNNTensorProperties output_properties;
RDK_CHECK_SUCCESS(
hbDNNGetOutputTensorProperties(&output_properties, dnn_handle, i),
"hbDNNGetOutputTensorProperties failed");
std::cout << "output[" << i << "] valid shape: ("
<< output_properties.validShape.dimensionSize[0] << ", "
<< output_properties.validShape.dimensionSize[1] << ", "
<< output_properties.validShape.dimensionSize[2] << ", "
<< output_properties.validShape.dimensionSize[3] << "), ";
std::cout << "QuantiType: " << output_properties.quantiType << std::endl;
}
// Step 5: 前处理 - 读取图像并转换为YUV420SP
// Step 5: Preprocessing - Load image and convert to YUV420SP
std::cout << "\033[32m-> Starting preprocessing\033[0m" << std::endl;
cv::Mat img = cv::imread(TEST_IMG_PATH);
if (img.empty()) {
std::cout << "Failed to load image: " << TEST_IMG_PATH << std::endl;
return -1;
}
std::cout << "✓ img path: " << TEST_IMG_PATH << std::endl;
std::cout << "✓ img (rows, cols, channels): (" << img.rows << ", " << img.cols << ", " << img.channels() << ")" << std::endl;
// 前处理参数
float y_scale = 1.0, x_scale = 1.0;
int x_shift = 0, y_shift = 0;
cv::Mat resize_img;
begin_time = std::chrono::system_clock::now();
if (PREPROCESS_TYPE == CENTER_CROP_TYPE) {
// Center Crop前处理
int new_h = INPUT_HEIGHT;
int new_w = INPUT_WIDTH;
// 确保尺寸为偶数
new_w = (new_w / 2) * 2;
new_h = (new_h / 2) * 2;
// 重新计算实际的缩放因子
x_scale = 1.0f * new_w / img.cols;
y_scale = 1.0f * new_h / img.rows;
x_shift = (INPUT_WIDTH - new_w) / 2;
int x_other = INPUT_WIDTH - new_w - x_shift;
y_shift = (INPUT_HEIGHT - new_h) / 2;
int y_other = INPUT_HEIGHT - new_h - y_shift;
cv::Size targetSize(new_w, new_h);
cv::resize(img, resize_img, targetSize);
cv::copyMakeBorder(resize_img, resize_img, y_shift, y_other, x_shift, x_other, cv::BORDER_CONSTANT, cv::Scalar(127, 127, 127));
} else {
// Resize前处理
cv::Size targetSize(INPUT_WIDTH, INPUT_HEIGHT);
cv::resize(img, resize_img, targetSize);
y_scale = 1.0 * INPUT_HEIGHT / img.rows;
x_scale = 1.0 * INPUT_WIDTH / img.cols;
}
std::cout << "✓ y_scale = " << y_scale << ", x_scale = " << x_scale << std::endl;
std::cout << "✓ y_shift = " << y_shift << ", x_shift = " << x_shift << std::endl;
// BGR转YUV420SP (NV12)
cv::Mat img_nv12;
cv::Mat yuv_mat;
cv::cvtColor(resize_img, yuv_mat, cv::COLOR_BGR2YUV_I420);
uint8_t *yuv = yuv_mat.ptr<uint8_t>();
img_nv12 = cv::Mat(INPUT_HEIGHT * 3 / 2, INPUT_WIDTH, CV_8UC1);
uint8_t *ynv12 = img_nv12.ptr<uint8_t>();
int uv_height = INPUT_HEIGHT / 2;
int uv_width = INPUT_WIDTH / 2;
int y_size = INPUT_HEIGHT * INPUT_WIDTH;
// 复制Y平面
memcpy(ynv12, yuv, y_size);
// 交错UV平面
uint8_t *nv12 = ynv12 + y_size;
uint8_t *u_data = yuv + y_size;
uint8_t *v_data = u_data + uv_height * uv_width;
for (int i = 0; i < uv_width * uv_height; i++) {
*nv12++ = *u_data++;
*nv12++ = *v_data++;
}
std::cout << "\033[31m pre process time = " << std::fixed << std::setprecision(2)
<< std::chrono::duration_cast<std::chrono::microseconds>(std::chrono::system_clock::now() - begin_time).count() / 1000.0
<< " ms\033[0m" << std::endl;
// Step 6: 准备输入tensor
// Step 6: Prepare input tensor
std::vector<hbDNNTensor> input_tensors(input_count);
std::vector<hbDNNTensor> output_tensors(output_count);
// 分配输入内存
for (int i = 0; i < input_count; i++) {
// 复制输入tensor属性
input_tensors[i].properties = input_properties;
int data_size;
if (i == 0) {
// 第一个输入:Y分量 224x224x1
data_size = INPUT_HEIGHT * INPUT_WIDTH;
// 设置tensor的stride信息
input_tensors[i].properties.validShape.dimensionSize[0] = 1;
input_tensors[i].properties.validShape.dimensionSize[1] = INPUT_HEIGHT;
input_tensors[i].properties.validShape.dimensionSize[2] = INPUT_WIDTH;
input_tensors[i].properties.validShape.dimensionSize[3] = 1;
// 设置stride
input_tensors[i].properties.stride[3] = 1; // 每个元素1字节
input_tensors[i].properties.stride[2] = 1; // 通道步长 = stride[3] * size[3] = 1 * 1
input_tensors[i].properties.stride[1] = INPUT_WIDTH; // 行步长 = stride[2] * size[2] = 1 * 224
input_tensors[i].properties.stride[0] = INPUT_WIDTH * INPUT_HEIGHT; // 整个tensor = stride[1] * size[1] = 224 * 224
} else {
// 第二个输入:UV分量 112x112x2 (尺寸减半,2通道)
int uv_h = INPUT_HEIGHT / 2; // 112
int uv_w = INPUT_WIDTH / 2; // 112
data_size = uv_h * uv_w * 2; // UV两个通道
// 设置tensor的stride信息
input_tensors[i].properties.validShape.dimensionSize[0] = 1;
input_tensors[i].properties.validShape.dimensionSize[1] = uv_h;
input_tensors[i].properties.validShape.dimensionSize[2] = uv_w;
input_tensors[i].properties.validShape.dimensionSize[3] = 2;
// 设置stride
input_tensors[i].properties.stride[3] = 1; // 每个元素1字节
input_tensors[i].properties.stride[2] = 2; // 通道步长 = stride[3] * size[3] = 1 * 2 = 2
input_tensors[i].properties.stride[1] = uv_w * 2; // 行步长 = stride[2] * size[2] = 2 * 112 = 224
input_tensors[i].properties.stride[0] = uv_w * uv_h * 2; // 整个tensor = stride[1] * size[1] = 224 * 112
}
// 分配内存
hbUCPMallocCached(&input_tensors[i].sysMem, data_size, 0);
std::cout << "✓ Input tensor " << i << " memory allocated: " << data_size << " bytes" << std::endl;
// 复制数据
if (i == 0) {
// 第一个输入:复制Y分量
memcpy(input_tensors[i].sysMem.virAddr, ynv12, INPUT_HEIGHT * INPUT_WIDTH);
std::cout << "✓ Y component data copied to tensor " << i << std::endl;
} else {
// 第二个输入:复制UV分量
uint8_t *uv_src = ynv12 + INPUT_HEIGHT * INPUT_WIDTH; // UV数据在Y之后
memcpy(input_tensors[i].sysMem.virAddr, uv_src, data_size);
std::cout << "✓ UV component data copied to tensor " << i << std::endl;
}
// 刷新内存
hbUCPMemFlush(&input_tensors[i].sysMem, HB_SYS_MEM_CACHE_CLEAN);
}
// 分配输出内存
for (int i = 0; i < output_count; i++) {
hbDNNTensorProperties &output_properties = output_tensors[i].properties;
hbDNNGetOutputTensorProperties(&output_properties, dnn_handle, i);
int out_aligned_size = output_properties.alignedByteSize;
hbUCPSysMem &mem = output_tensors[i].sysMem;
hbUCPMallocCached(&mem, out_aligned_size, 0);
std::cout << "✓ Output tensor " << i << " memory allocated: " << out_aligned_size << " bytes" << std::endl;
}
// Step 7: 推理
// Step 7: Inference
std::cout << "\033[32m-> Starting inference\033[0m" << std::endl;
begin_time = std::chrono::system_clock::now();
// 生成任务句柄
hbUCPTaskHandle_t task_handle = nullptr;
int infer_ret = hbDNNInferV2(&task_handle, output_tensors.data(), input_tensors.data(), dnn_handle);
if (infer_ret != 0) {
std::cout << "[ERROR] hbDNNInferV2 failed with error code: " << infer_ret << std::endl;
return -1;
}
if (task_handle == nullptr) {
std::cout << "[ERROR] task_handle is null after hbDNNInferV2" << std::endl;
return -1;
}
std::cout << "✓ Inference task created successfully" << std::endl;
// 设置UCP调度参数
hbUCPSchedParam ctrl_param;
HB_UCP_INITIALIZE_SCHED_PARAM(&ctrl_param);
ctrl_param.backend = HB_UCP_BPU_CORE_ANY; // 使用任意BPU核心
// 提交任务到UCP
int submit_ret = hbUCPSubmitTask(task_handle, &ctrl_param);
if (submit_ret != 0) {
std::cout << "[ERROR] hbUCPSubmitTask failed with error code: " << submit_ret << std::endl;
return -1;
}
std::cout << "✓ Inference task submitted successfully" << std::endl;
// 等待任务完成,设置合理的超时时间(10秒)
int wait_ret = hbUCPWaitTaskDone(task_handle, 10000);
if (wait_ret != 0) {
std::cout << "[ERROR] hbUCPWaitTaskDone failed with error code: " << wait_ret << std::endl;
return -1;
}
std::cout << "✓ Inference task completed successfully" << std::endl;
std::cout << "\033[31m forward time = " << std::fixed << std::setprecision(2)
<< std::chrono::duration_cast<std::chrono::microseconds>(std::chrono::system_clock::now() - begin_time).count() / 1000.0
<< " ms\033[0m" << std::endl;
// Step 8: 后处理
// Step 8: Post-processing
std::cout << "\033[32m-> Starting post-processing\033[0m" << std::endl;
begin_time = std::chrono::system_clock::now();
// 刷新BPU内存
hbUCPMemFlush(&(output_tensors[0].sysMem), HB_SYS_MEM_CACHE_INVALIDATE);
// 获取输出数据指针
auto *output_data = reinterpret_cast<float *>(output_tensors[0].sysMem.virAddr);
// 如果模型输出是量化的int32,需要进行反量化
if (output_tensors[0].properties.tensorType == HB_DNN_TENSOR_TYPE_S32) {
auto *int_output = reinterpret_cast<int32_t *>(output_tensors[0].sysMem.virAddr);
auto *output_scale = reinterpret_cast<float *>(output_tensors[0].properties.scale.scaleData);
// 反量化处理
std::vector<float> dequantized_output(CLASSES_NUM);
for (int i = 0; i < CLASSES_NUM; ++i) {
dequantized_output[i] = int_output[i] * output_scale[i];
}
// 应用Softmax转换为概率分布
std::vector<float> probabilities(CLASSES_NUM);
softmax(dequantized_output.data(), probabilities.data(), CLASSES_NUM);
// 获取Top-K结果
std::vector<std::pair<float, int>> top_k_results;
for (int i = 0; i < CLASSES_NUM; ++i) {
top_k_results.push_back({probabilities[i], i});
}
// 排序并获取Top-K
std::partial_sort(top_k_results.begin(), top_k_results.begin() + TOP_K, top_k_results.end(),
[](const std::pair<float, int>& a, const std::pair<float, int>& b) {
return a.first > b.first;
});
std::cout << "✓ Top " << TOP_K << " classification results:" << std::endl;
for (int i = 0; i < TOP_K; ++i) {
std::cout << "Class " << top_k_results[i].second << ": " << std::fixed << std::setprecision(4) << top_k_results[i].first << std::endl;
}
// 打印最终分类结果
std::cout << "\033[32m-> Final Classification Results\033[0m" << std::endl;
for (int i = 0; i < TOP_K; ++i) {
int class_id = top_k_results[i].second;
float confidence = top_k_results[i].first;
std::string class_name = (static_cast<size_t>(class_id) < imagenet_classes.size()) ?
imagenet_classes[class_id] : "Unknown";
std::cout << "Rank " << (i + 1) << ": " << class_name
<< " (Class " << class_id << ")"
<< " - Confidence: " << std::fixed << std::setprecision(4) << confidence << std::endl;
}
} else {
// 如果输出是float类型,直接处理
std::vector<float> raw_output(CLASSES_NUM);
for (int i = 0; i < CLASSES_NUM; ++i) {
raw_output[i] = output_data[i];
}
// 应用Softmax转换为概率分布
std::vector<float> probabilities(CLASSES_NUM);
softmax(raw_output.data(), probabilities.data(), CLASSES_NUM);
// 获取Top-K结果
std::vector<std::pair<float, int>> top_k_results;
for (int i = 0; i < CLASSES_NUM; ++i) {
top_k_results.push_back({probabilities[i], i});
}
// 排序并获取Top-K
std::partial_sort(top_k_results.begin(), top_k_results.begin() + TOP_K, top_k_results.end(),
[](const std::pair<float, int>& a, const std::pair<float, int>& b) {
return a.first > b.first;
});
std::cout << "✓ Top " << TOP_K << " classification results:" << std::endl;
for (int i = 0; i < TOP_K; ++i) {
std::cout << "Class " << top_k_results[i].second << ": " << std::fixed << std::setprecision(4) << top_k_results[i].first << std::endl;
}
// 打印最终分类结果
std::cout << "\033[32m-> Final Classification Results\033[0m" << std::endl;
for (int i = 0; i < TOP_K; ++i) {
int class_id = top_k_results[i].second;
float confidence = top_k_results[i].first;
std::string class_name = (static_cast<size_t>(class_id) < imagenet_classes.size()) ?
imagenet_classes[class_id] : "Unknown";
std::cout << "Rank " << (i + 1) << ": " << class_name
<< " (Class " << class_id << ")"
<< " - Confidence: " << std::fixed << std::setprecision(4) << confidence << std::endl;
}
}
std::cout << "\033[31m Post Process time = " << std::fixed << std::setprecision(2)
<< std::chrono::duration_cast<std::chrono::microseconds>(std::chrono::system_clock::now() - begin_time).count() / 1000.0
<< " ms\033[0m" << std::endl;
// Step 9: 资源释放
// Step 9: Release resources
std::cout << "\033[32m-> Cleaning up resources\033[0m" << std::endl;
// 释放任务句柄
hbUCPReleaseTask(task_handle);
// 释放输入内存
for (int i = 0; i < input_count; i++) {
hbUCPFree(&(input_tensors[i].sysMem));
}
// 释放输出内存
for (int i = 0; i < output_count; i++) {
hbUCPFree(&(output_tensors[i].sysMem));
}
// 释放模型
hbDNNRelease(packed_dnn_handle);
std::cout << "\033[32m✓ Program completed successfully\033[0m" << std::endl;
return 0;
}
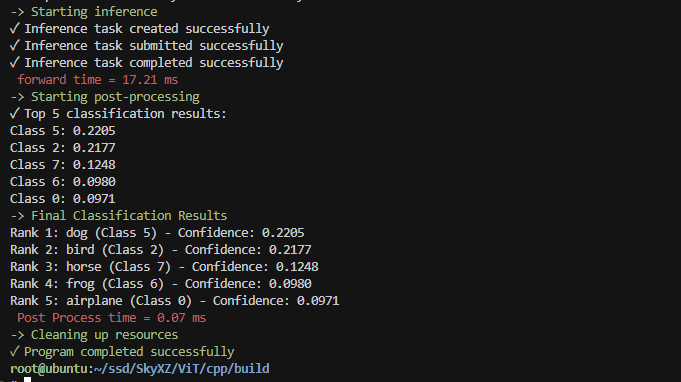
编译之后结果如下:
mkdir build && cd build
cmake .. && make
./main