前提:我使用自己的鱼眼相机采集数据,然后使用本地图片做深度估计测试,图像大小为1280*720,模型为stereonetv2.2 图片上传时已经经过极线矫正,板子RDK X5
命令:ros2 launch hobot_stereonet stereonet_model_web_visual.launch.py stereonet_model_file_path:=/opt/tros/humble/share/hobot_stereonet/config/DStereoV2.2.bin postprocess:=v2.2 use_local_image:=True local_image_path:=/root/stereo need_rectify:=False camera_fx:=1775.4219956625914 camera_fy:=1776.80292877913 camera_cx:=558.2311694882925 camera_cy:=410.7506543517803 base_line:=0.025351336639584762 height_min:=-10.0 height_max:=10.0 pc_max_depth:=5.0 save_image_all:=True save_dir:=./offline_result
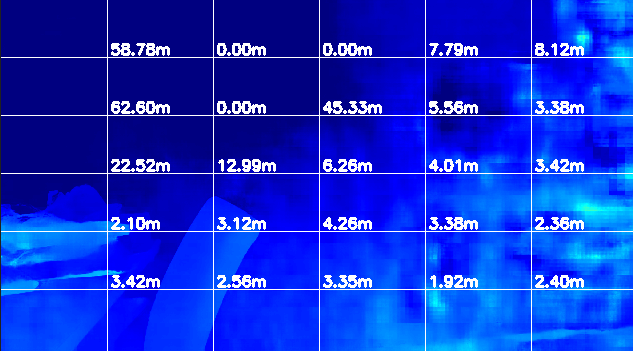
结果
ros2 launch hobot_stereonet stereonet_model_web_visual.launch.py stereonet_model_file_path:=/opt/tros/humble/share/hobot_stereonet/config/DStereoV2.2.bin postprocess:=v2.2 use_local_image:=True local_image_path:=/root/stereo need_rectify:=False camera_fx:=1775.4219956625914 camera_fy:=1776.80292877913 camera_cx:=558.2311694882925 camera_cy:=410.7506543517803 base_line:=0.025351336639584762 height_min:=-10.0 height_max:=10.0 pc_max_depth:=5.0 save_image_all:=True save_dir:=./offline_result
部分输出
[stereonet_model_node-1] [INFO] [1754706025.309219010] [StereoNetNode]: stereonet model init successed
[stereonet_model_node-1] [WARN] [1754706025.313641225] [StereoNetNode]: Add StereoRectify Instance: stereo0
[stereonet_model_node-1] calib model: pinhole
[stereonet_model_node-1] Kl:
[stereonet_model_node-1] [550.8035496757482, 0, 661.1263865968855;
[stereonet_model_node-1] 0, 493.2217446270412, 303.1855486861886;
[stereonet_model_node-1] 0, 0, 1]
[stereonet_model_node-1] Dl:
[stereonet_model_node-1] [-0.2711243156151719, 0.05060829228589933, 0.0008875379580411214, -0.002327649533853763]
[stereonet_model_node-1] Kr:
[stereonet_model_node-1] [553.8719837106196, 0, 624.0414884734051;
[stereonet_model_node-1] 0, 494.1581133345531, 273.4937625955584;
[stereonet_model_node-1] 0, 0, 1]
[stereonet_model_node-1] Dr:
[stereonet_model_node-1] [-0.2788646377570498, 0.05429183538657035, 0.001719021677286618, 0.0004764791436115057]
[stereonet_model_node-1] R, t:
[stereonet_model_node-1] [0.9999509436461581, 0.0004894496829122635, 0.00989296417593623;
[stereonet_model_node-1] -0.0005603264721328329, 0.9999741893898487, 0.007162861745138554;
[stereonet_model_node-1] -0.00988920297208464, -0.007168053650973828, 0.9999254085537852]
[stereonet_model_node-1] [-0.07003079278398011;
[stereonet_model_node-1] 0.001125517447520849;
[stereonet_model_node-1] -0.0006298903345308758]
[stereonet_model_node-1] calib file width, height: 1280, 640
[stereonet_model_node-1] model input width, height: 640, 352
[stereonet_model_node-1] fov_scale: 0.8
[stereonet_model_node-1] resize_before_rectify: 0
[stereonet_model_node-1] width_scale, height_scale: 1, 1
[stereonet_model_node-1] [WARN] [1754706025.341997930] [StereoNetNode]: => rectified fx: 1775.421997, fy: 1776.802979, cx: 558.231140, cy: 410.750641, base_line: :0.025351
请问上述的针孔标定参数会使用在推理流程当中吗,配置文件参数需要更改成自己的参数吗,例如宽高之类的