参考文档:YOLOv11,地瓜RDK X5开发板,TROS端到端140FPS! - 板卡使用 / RDK Model Zoo - 地瓜机器人论坛
root@ubuntu:/home/sunrise/yolo# source /opt/tros/humble/setup.bash
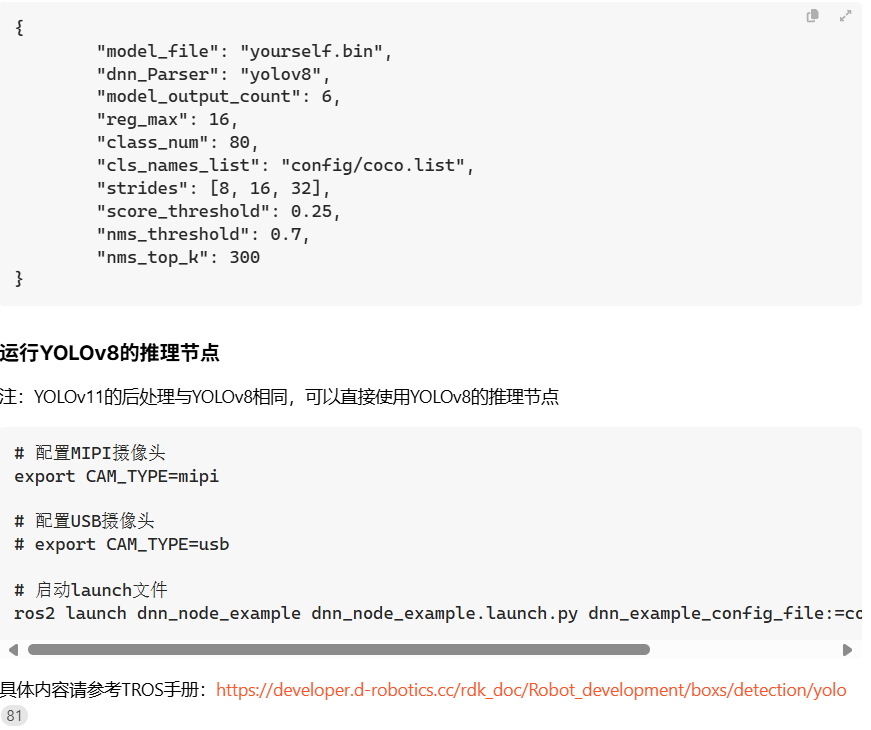
export CAM_TYPE=mipi
ros2 launch dnn_node_example dnn_node_example.launch.py
dnn_example_config_file:=/home/sunrise/yolo/test/test_mipi/yolov11.json
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-09-11-15-01-51-078165-ubuntu-15150
[INFO] [launch]: Default logging verbosity is set to INFO
dnn_node_example_path is /opt/tros/humble/lib/dnn_node_example
cp_cmd is cp -r /opt/tros/humble/lib/dnn_node_example/config .
camera_type is mipi
using mipi cam
Hobot shm pkg enables zero-copy with fastrtps profiles file: /opt/tros/humble/lib/hobot_shm/config/shm_fastdds.xml
Hobot shm pkg sets RMW_FASTRTPS_USE_QOS_FROM_XML: 1
config_file_path is /opt/tros/humble/lib/mipi_cam/config/
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
webserver has launch
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
config_file_path is /opt/tros/humble/lib/mipi_cam/config/
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
webserver has launch
[INFO] [mipi_cam-1]: process started with pid [15159]
[INFO] [hobot_codec_republish-2]: process started with pid [15161]
[INFO] [example-3]: process started with pid [15163]
[INFO] [websocket-4]: process started with pid [15165]
[hobot_codec_republish-2] [WARN] [1757574111.634915123] [hobot_codec_encoder]: Parameters:
[hobot_codec_republish-2] sub_topic: /hbmem_img
[hobot_codec_republish-2] pub_topic: /image
[hobot_codec_republish-2] channel: 1
[hobot_codec_republish-2] in_mode: shared_mem
[hobot_codec_republish-2] out_mode: ros
[hobot_codec_republish-2] in_format: nv12
[hobot_codec_republish-2] out_format: jpeg
[hobot_codec_republish-2] enc_qp: 10
[hobot_codec_republish-2] jpg_quality: 60
[hobot_codec_republish-2] input_framerate: 30
[hobot_codec_republish-2] output_framerate: -1
[hobot_codec_republish-2] dump_output: 0
[hobot_codec_republish-2] [WARN] [1757574111.640839199] [HobotCodecImpl]: platform x5
[hobot_codec_republish-2] [WARN] [1757574111.641057782] [hobot_codec_encoder]: Enabling zero-copy
[mipi_cam-1] [WARN] [1757574111.951048856] [mipi_node]: dual_combine value: 0
[mipi_cam-1] [WARN] [1757574111.951288106] [mipi_node]: frame_ts_type value: realtime
[mipi_cam-1] [WARN] [1757574111.963899049] [mipi_factory]: board_type X5_RDK
[mipi_cam-1]
[mipi_cam-1] [WARN] [1757574111.965063172] [mipi_cam]: this board support mipi:
[mipi_cam-1] [WARN] [1757574111.965307839] [mipi_cam]: host 0
[mipi_cam-1] [WARN] [1757574111.965405297] [mipi_cam]: host 2
[mipi_cam-1] [WARN] [1757574111.965709797] [mipi_cam]: Camera calibration file: /calibration.yaml is not exist!
[mipi_cam-1] If you need calibration msg, please make sure the calibration file path is correct and the calibration file exists!
[example-3] [BPU_PLAT]BPU Platform Version(1.3.6)!
[example-3] [HBRT] set log level as 0. version = 3.15.55.0
[example-3] [DNN] Runtime version = 1.24.5(3.15.55 HBRT)
[websocket-4] [WARN] [1757574111.999863504] [websocket]:
[websocket-4] Parameter:
[websocket-4] image_topic: /image
[websocket-4] image_type: mjpeg
[websocket-4] only_show_image: 0
[websocket-4] smart_topic: hobot_dnn_detection
[websocket-4] output_fps: 0
[example-3] [A][DNN][packed_model.cpp:247]Model [HorizonRT] The model builder version = 1.24.3
[mipi_cam-1] [WARN] [1757574112.512709786] [mipi_cap]: gdc bin file ���� open failed
[mipi_cam-1]
[mipi_cam-1] [WARN] [1757574113.284760080] [mipi_cam]: [init]->cap F37 init success.
[mipi_cam-1]
[mipi_cam-1] [WARN] [1757574113.285007038] [mipi_cam]: Enabling zero-copy
[hobot_codec_republish-2] [WARN] [1757574113.378847381] [hobot_codec_encoder]: Loaned messages are only safe with const ref subscription callbacks. If you are using any other kind of subscriptions, set the ROS_DISABLE_LOANED_MESSAGES environment variable to 1 (the default).
[h