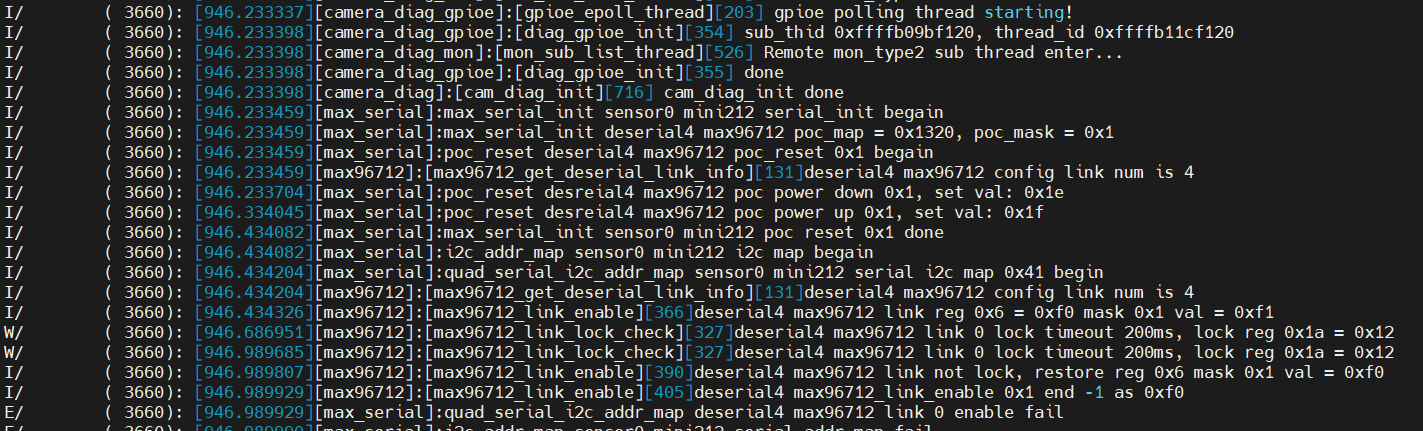
RDK S100 开发板serdes那路接红外摄像头,模组初始化成功之后,使用get_vin_data 应用dump数据报错,错误信息如下:
08-26 23:23:53.728 I/ ( 3255): [51.974434][camera_diag_gpio]:[gpio_polling_thread][94] gpio polling thread starting!
08-26 23:23:53.728 I/ ( 3255): [51.974461][camera_diag_mon]:[mon_sub_list_thread][526] Local mon_type1 sub thread enter…
08-26 23:23:53.728 I/ ( 3255): [51.974506][camera_diag_gpioe]:[gpioe_epoll_thread][203] gpioe polling thread starting!
08-26 23:23:53.728 I/ ( 3255): [51.974522][camera_diag_gpioe]:[diag_gpioe_init][354] sub_thid 0xffffb46ef120, thread_id 0xffffb4eff120
08-26 23:23:53.728 I/ ( 3255): [51.974525][camera_diag_mon]:[mon_sub_list_thread][526] Local mon_type2 sub thread enter…
08-26 23:23:53.728 I/ ( 3255): [51.974541][camera_diag_gpioe]:[diag_gpioe_init][355] done
08-26 23:23:53.728 I/ ( 3255): [51.974621][camera_diag_gpio]:[gpio_polling_thread][94] gpio polling thread starting!
08-26 23:23:53.728 I/ ( 3255): [51.974659][camera_diag_mon]:[mon_sub_list_thread][526] Remote mon_type1 sub thread enter…
08-26 23:23:53.728 I/ ( 3255): [51.974697][camera_diag_gpioe]:[gpioe_epoll_thread][203] gpioe polling thread starting!
08-26 23:23:53.728 I/ ( 3255): [51.974716][camera_diag_gpioe]:[diag_gpioe_init][354] sub_thid 0xffffb26af120, thread_id 0xffffb2ebf120
08-26 23:23:53.728 I/ ( 3255): [51.974720][camera_diag_mon]:[mon_sub_list_thread][526] Remote mon_type2 sub thread enter…
08-26 23:23:53.728 I/ ( 3255): [51.974728][camera_diag_gpioe]:[diag_gpioe_init][355] done
08-26 23:23:53.728 I/ ( 3255): [51.974735][camera_diag]:[cam_diag_init][716] cam_diag_init done
08-26 23:23:53.728 I/ ( 3255): [51.974792][max_serial]:max_serial_init sensor0 kp612w serial_init begain
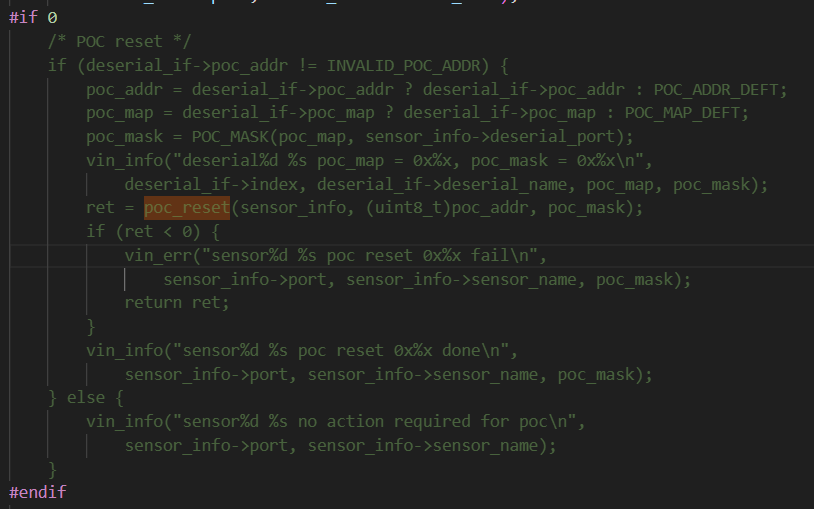
08-26 23:23:53.728 I/ ( 3255): [51.974800][max_serial]:max_serial_init deserial4 max96712 poc_map = 0x1320, poc_mask = 0x1
08-26 23:23:53.728 I/ ( 3255): [51.974804][max_serial]:poc_reset deserial4 max96712 poc_reset 0x1 begain
08-26 23:23:53.728 I/ ( 3255): [51.974812][max96712]:[max96712_get_deserial_link_info][131]deserial4 max96712 config link num is 4
08-26 23:23:53.729 I/ ( 3255): [51.975056][max_serial]:poc_reset desreial4 max96712 poc power down 0x1, set val: 0x1e
08-26 23:23:53.829 I/ ( 3255): [52.075489][max_serial]:poc_reset desreial4 max96712 poc power up 0x1, set val: 0x1f
08-26 23:23:53.929 I/ ( 3255): [52.175552][max_serial]:max_serial_init sensor0 kp612w poc reset 0x1 done
08-26 23:23:53.929 I/ ( 3255): [52.175568][max_serial]:i2c_addr_map sensor0 kp612w i2c map begain
08-26 23:23:53.929 I/ ( 3255): [52.175579][max_serial]:quad_serial_i2c_addr_map sensor0 kp612w serial i2c map 0x42 begin
08-26 23:23:53.929 I/ ( 3255): [52.175583][max_serial]:quad_serial_i2c_addr_map serial_addr=42, sensor_addr=3e, eeprom_addr=52,
08-26 23:23:53.929 I/ ( 3255): [52.175598][max96712]:[max96712_get_deserial_link_info][131]deserial4 max96712 config link num is 4
08-26 23:23:53.929 I/ ( 3255): [52.175777][max96712]:[max96712_link_enable][365]deserial4 max96712 link reg 0x6 = 0xff mask 0x1 val = 0xff
08-26 23:23:53.929 I/ ( 3255): [52.175785][max96712]:[max96712_link_enable][367]fangli add test
08-26 23:23:54.101 I/ ( 3255): [52.347401][max96712]:[max96712_link_lock_check][335]deserial4 max96712 link 0x1 locked, lock time is 0ms
08-26 23:23:54.102 I/ ( 3255): [52.347904][max_serial]:serial_pipeline_init max9295_pipeline_init datatype = 4 ser_model = 2
08-26 23:23:54.113 I/ ( 3255): [52.359043][max_serial]:max_serial_init sensor0 kp612w rst_mfp is 0
08-26 23:23:54.214 I/ ( 3255): [52.460426][sensor_lib]:[camera_sensor_devop_func][1510] thread sen0:kp612w work
08-26 23:23:54.216 I/ ( 3255): [52.462479][sensor_lib]:[camera_sensor_init][1838] sensor0 kp612w init real done
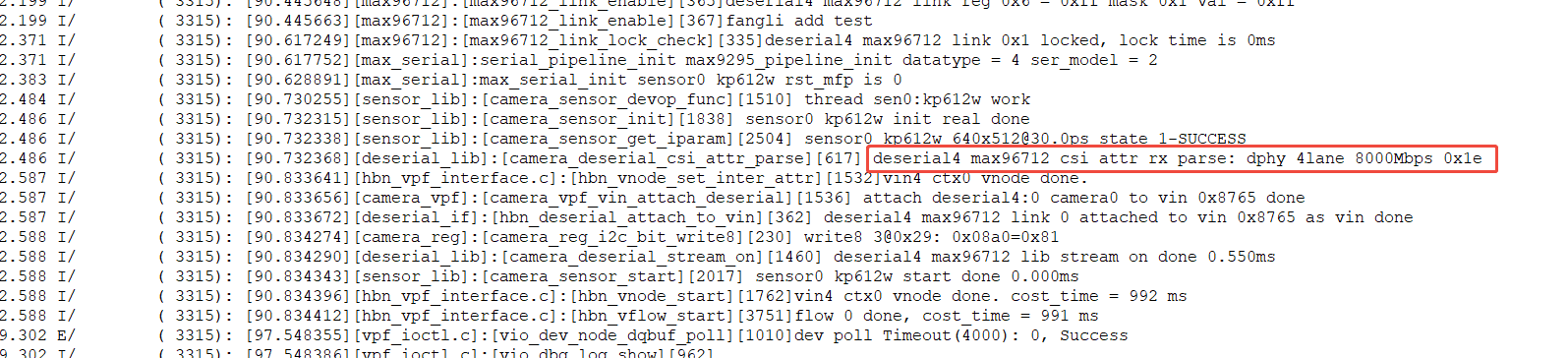
08-26 23:23:54.216 I/ ( 3255): [52.462517][sensor_lib]:[camera_sensor_get_iparam][2504] sensor0 kp612w 640x516@30.0ps state 1-SUCCESS
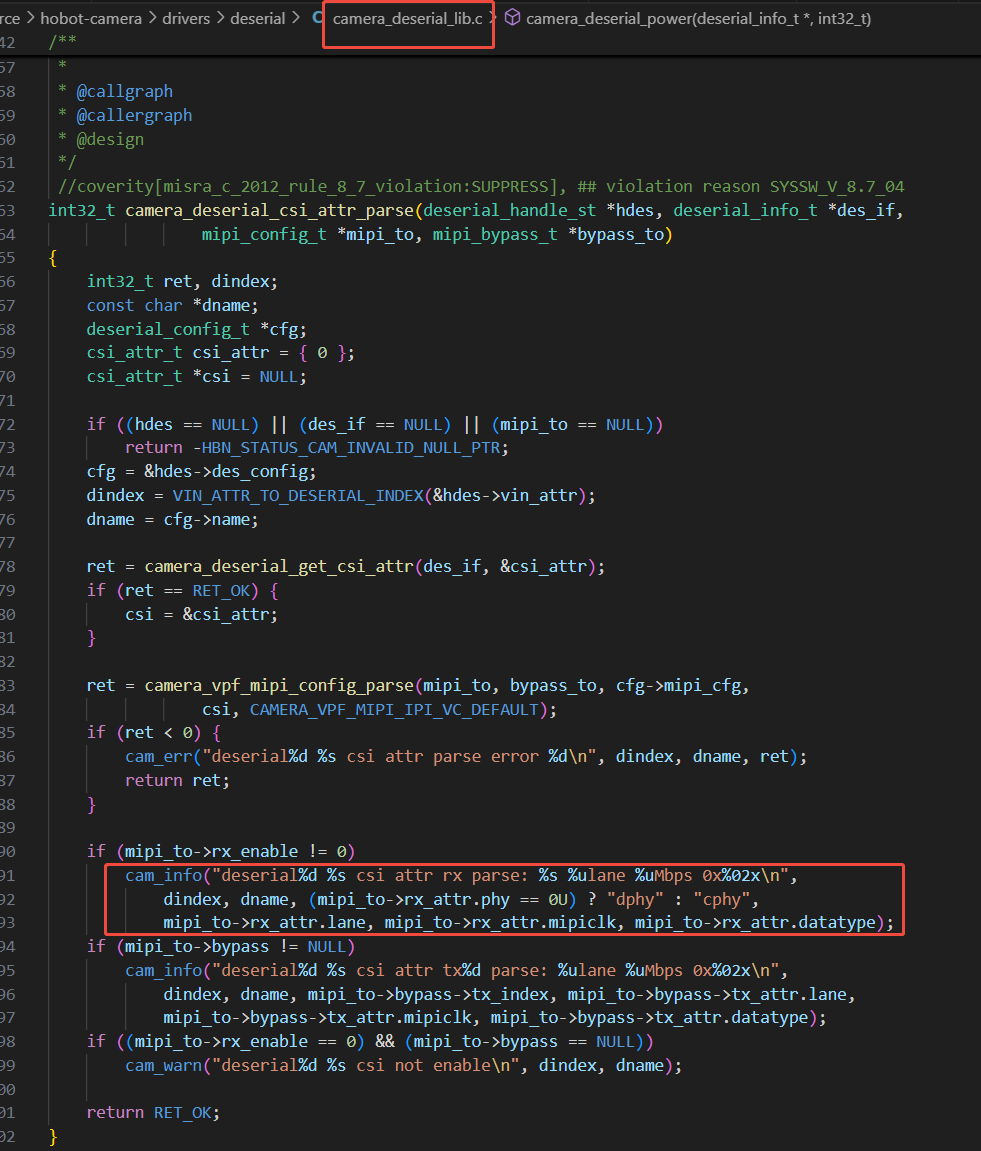
08-26 23:23:54.216 I/ ( 3255): [52.462543][deserial_lib]:[camera_deserial_csi_attr_parse][617] deserial4 max96712 csi attr rx parse: dphy 4lane 8000Mbps 0x1e
08-26 23:23:54.317 I/ ( 3255): [52.563797][hbn_vpf_interface.c]:[hbn_vnode_set_inter_attr][1532]vin4 ctx0 vnode done.
08-26 23:23:54.317 I/ ( 3255): [52.563808][camera_vpf]:[camera_vpf_vin_attach_deserial][1536] attach deserial4:0 camera0 to vin 0x8765 done
08-26 23:23:54.318 I/ ( 3255): [52.563816][deserial_if]:[hbn_deserial_attach_to_vin][362] deserial4 max96712 link 0 attached to vin 0x8765 as vin done
08-26 23:23:54.318 I/ ( 3255): [52.564430][camera_reg]:[camera_reg_i2c_bit_write8][230] write8 3@0x29: 0x08a0=0x84
08-26 23:23:54.318 I/ ( 3255): [52.564449][deserial_lib]:[camera_deserial_stream_on][1460] deserial4 max96712 lib stream on done 0.562ms
08-26 23:23:54.318 I/ ( 3255): [52.564503][sensor_lib]:[camera_sensor_start][2017] sensor0 kp612w start done 0.001ms
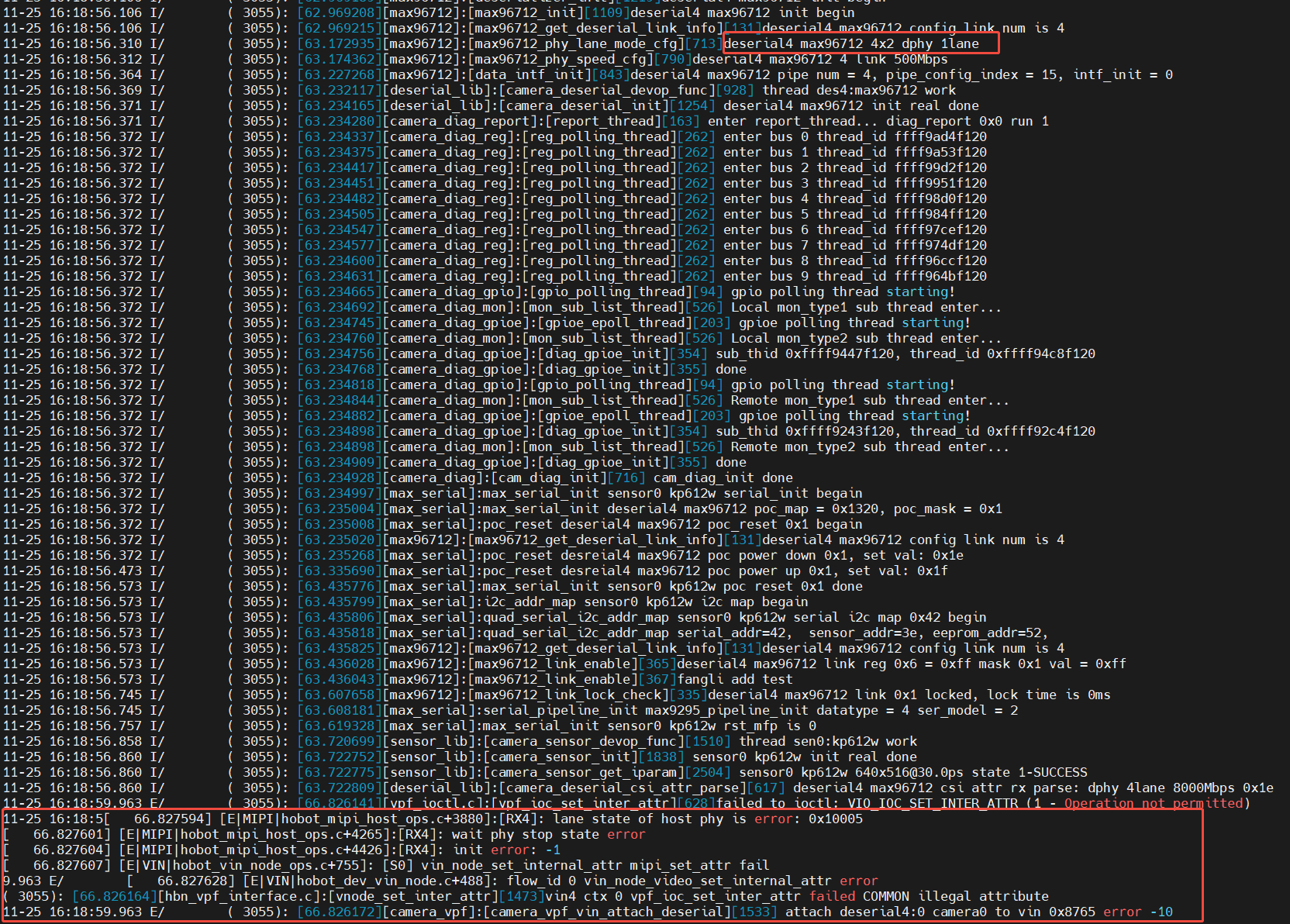
[ 55.569906] [E|MIPI|hobot_mipi_host_ops.c+3930]:[RX4]: hs reception check error 0x10000
[ 55.569912] [E|MIPI|hobot_mipi_host_ops.c+3985]:[RX4]: hs reception state error
[ 55.569914] [E|MIPI|hobot_mipi_host_ops.c+4570]:[RX4]: start error: -1
[ 55.569917] [E|VIN|hobot_vin_node_ops.c+1287]: vin_node_start mipi start fail
[ 55.875360] [E|SEN|hobot_sensor_ops.c+1269]:[SENSOR0]: sensor_evk_do: doing wait evk failed -512
红外摄像头模组信息如下:
serial型号–MAX9295A
serial_addr—0x40(七位地址)
sensor_addr—0x3c
分配率:640x516
datatype:uyuv 422-8bit
fps:30HZ
link lock、video lock、video pipeline lock,pclk detect都成功;
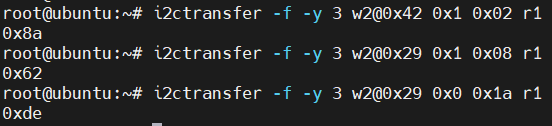
0x8d0 检测到相机数据,但是dump 数据报错;