用SC230AI想进行OCC在线推理,注意到有mipi-occ,故在mipi_occ_node.launch.py中修改输入图像参数,具体为
# mipi stereo camera node
mipi_cam_node = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(
get_package_share_directory("mipi_cam"),
"launch/mipi_cam_dual_channel.launch.py",
)
),
launch_arguments={
#"frame_id": "camera_link",
"log_level": "warn",
"mipi_image_width": "640",
"mipi_image_height": "352",
}.items(),
)
按照教程在rviz2设置参数后:
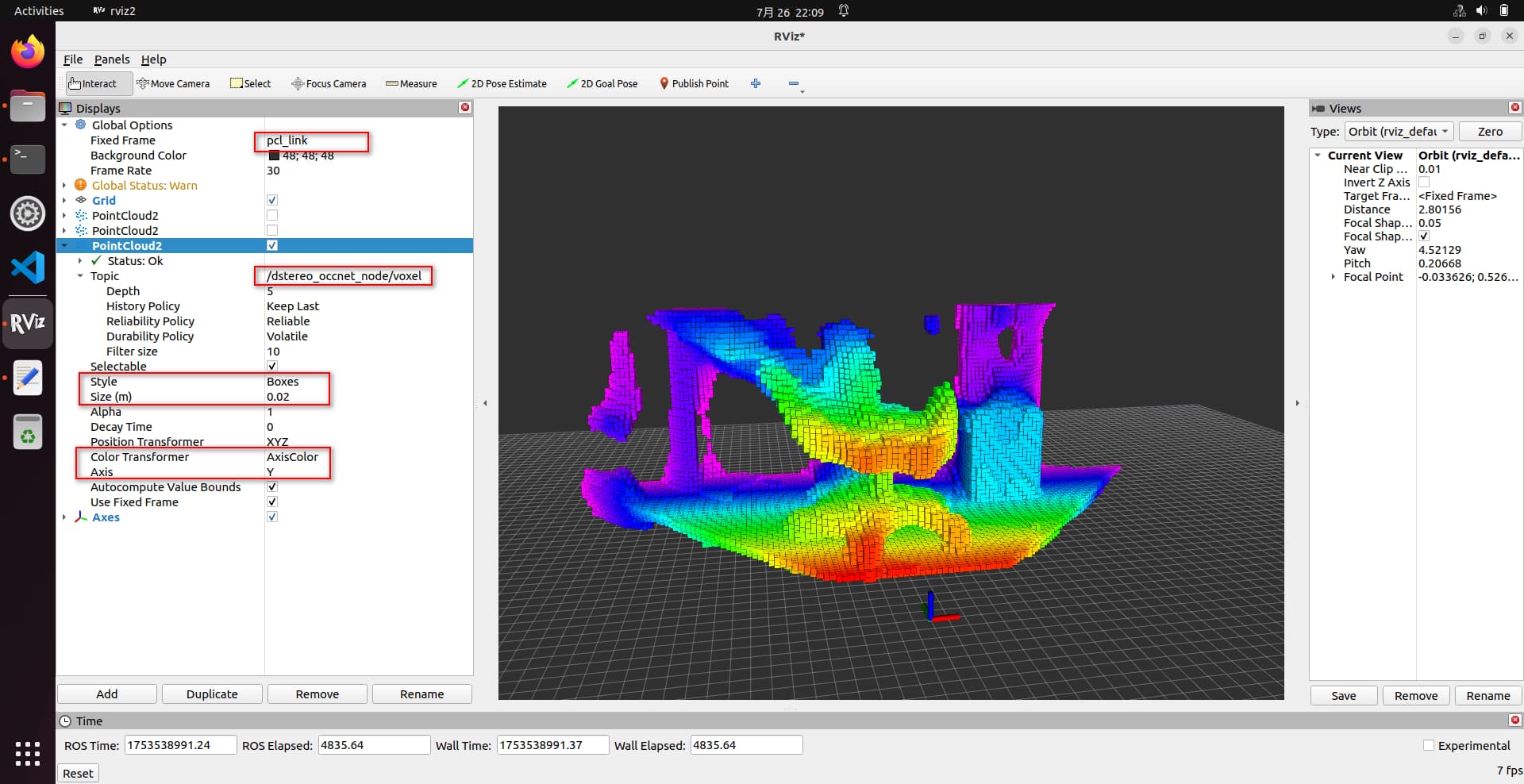
设置后可以得到实时的推理结果,但无法在rviz2查看占用的网格,如何解决呢?
log为
[dstereo_occnet_node-2] [A][DNN][packed_model.cpp:247][Model](2025-12-15,17:54:31.533.549) [HorizonRT] The model builder version = 1.24.4
[mipi_cam-1] [WARN] [1765792472.386339682] [mipi_cap]: X5 start gdc cal.
[mipi_cam-1]
[mipi_cam-1] [WARN] [1765792473.128637855] [mipi_cam]: [init]->cap sc230ai-30fps init success.
[mipi_cam-1]
[hobot_codec_republish-3] [WARN] [1765792473.234263070] [HobotVenc]: init_pic_w_: 640, init_pic_h_: 704, alined_pic_w_: 640, alined_pic_h_: 704, aline_w_: 16, aline_h_: 16
[hobot_codec_republish-3] [WARN] [1765792475.528828615] [hobot_codec_encoder]: Sub imgRaw fps [4.76]
[hobot_codec_republish-3] [WARN] [1765792475.532350038] [hobot_codec_encoder]: Pub img fps [4.75]
rdkos_info_X5.txt (20.6 KB)