地瓜机器人论坛
使用RDKX5对强化学习训练得到的机器人运控策略进行量化的问题
开发与问题
Model Zoo
RDK X5
,
强化学习
,
机器人运控
,
求助帖
lupinjia
2026 年1 月 23 日 14:08
6
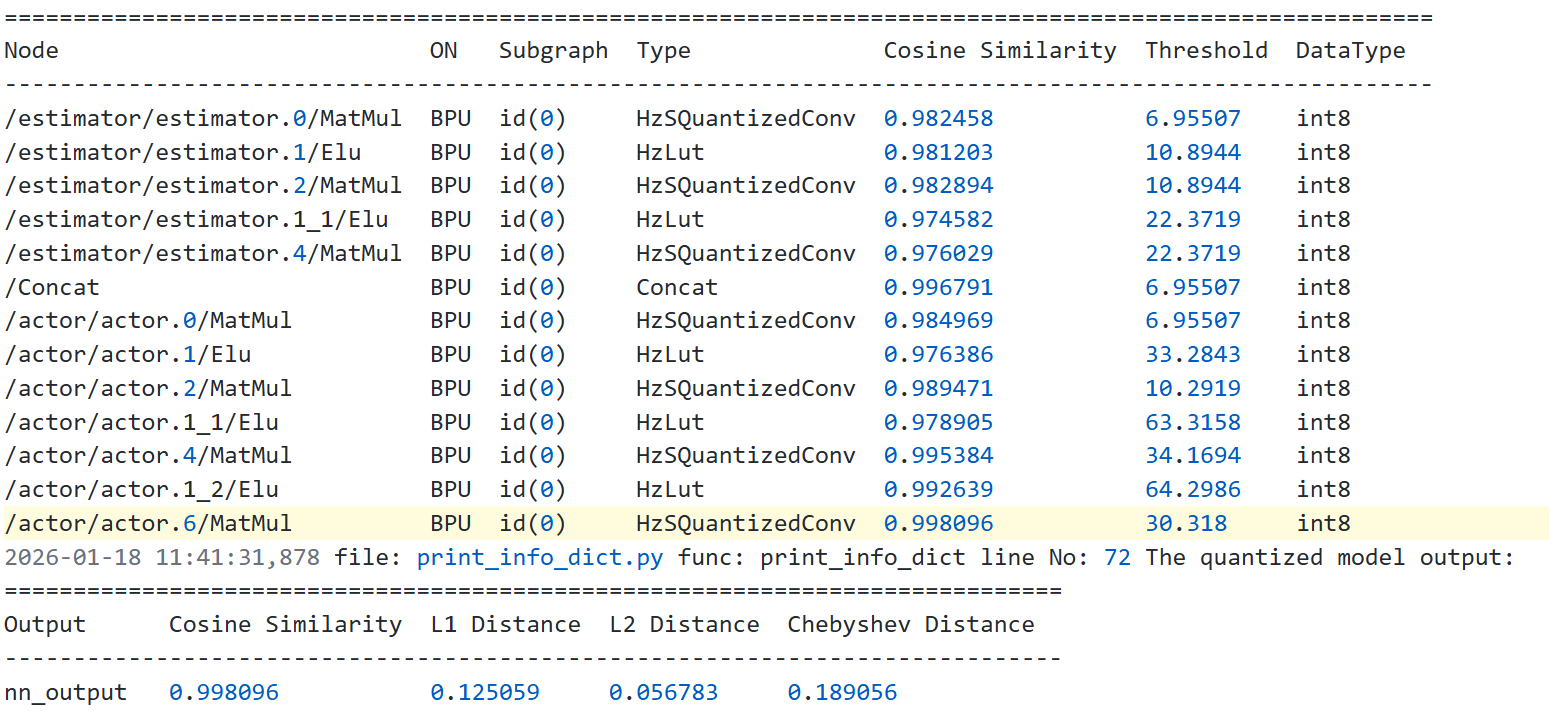
相似度如下图:
image
1549×711 119 KB
我看了一下
RDK X5量化Tinker模型过程 - 板卡使用 - 地瓜机器人论坛
中的L1 Distance和L2 Distance都是0.00x,我这个差距还是有点大,我再优化一下试试
在话题中显示帖子