感谢你的反馈!虽然当前界面显示“这块展示没有了”,但我会继续为你提供完整的解决方案。你提出的核心问题——在 RDK X5 上自编译 OpenCV 导致 GPU 加速性能下降,且官方无文档支持——是一个非常典型的技术困境。
由于我们无法直接访问论坛的最新内容或用户私有数据,我将基于现有信息和通用实践,为你整理一份可执行、分步骤、针对 RDK X5 的 OpenCV 自编译指南 + 性能优化建议。这份指南旨在帮助你从零开始构建一个稳定可用的 OpenCV 环境,并解决 GPU 加速慢的问题。
 最终目标:在 RDK X5 上成功编译并启用 OpenCL GPU 加速
最终目标:在 RDK X5 上成功编译并启用 OpenCL GPU 加速
我们将分为以下几个部分:
- 确认硬件架构(GPU 类型)
- 安装必要的依赖和 OpenCL 驱动
- 下载并编译 OpenCV(含 contrib 模块)
- 验证编译结果与性能
- 如果失败,提供回退方案
 第一步:确认你的 RDK X5 GPU 架构
第一步:确认你的 RDK X5 GPU 架构
这是最关键的一步!不同 GPU 平台需要不同的驱动和配置。
运行以下命令获取信息:
# 查看设备型号
lspci | grep -i vga
# 检查 OpenCL 支持
clinfo
# 查看系统内核版本
uname -a
# 查看 CPU 信息(用于判断是否为 ARM 架构)
cat /proc/cpuinfo | grep "model name"
输出解读:
| 输出示例 |
含义 |
推荐操作 |
NVIDIA Corporation 或 GeForce |
Jetson 平台(如 Orin/Xavier) |
安装 NVIDIA OpenCL SDK |
Mali-G72 或 ARM |
ARM + Mali GPU |
安装 Mesa OpenCL 驱动 |
| 无输出或仅显示 CPU |
OpenCL 未安装或不支持 |
先安装 clinfo 和对应驱动 |
 如果
如果 clinfo 未安装,请先运行:
sudo apt install clinfo
第二步:根据 GPU 类型安装 OpenCL 驱动
 情况 1:Jetson 平台(NVIDIA)
情况 1:Jetson 平台(NVIDIA)
sudo apt update
sudo apt install nvidia-opencl-dev
sudo apt install cuda-toolkit-12-0 # 根据你的 Jetson 版本调整,如 Orin 是 12.0,Xavier 是 10.2
 注意:不要启用 CUDA,除非你明确知道要加速。OpenCL 在嵌入式平台更稳定。
注意:不要启用 CUDA,除非你明确知道要加速。OpenCL 在嵌入式平台更稳定。
 情况 2:ARM + Mali GPU
情况 2:ARM + Mali GPU
sudo apt update
sudo apt install mesa-opencl-icd ocl-icd-libopencl1
然后验证:
clinfo | grep "Device Name"
你应该看到类似:
Device Name: Mali-G72
如果没有,可能需要更新内核或安装特定固件(如某些 RDK X5 型号需手动加载 Mali 驱动)。
第三步:下载并编译 OpenCV(推荐使用最新稳定版)
1. 下载源码
cd ~
git clone https://github.com/opencv/opencv.git
git clone https://github.com/opencv/opencv_contrib.git
2. 创建构建目录
mkdir opencv-build && cd opencv-build
3. 执行 CMake 配置(关键参数)
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D CMAKE_INSTALL_PREFIX=/usr/local \
-D OPENCV_EXTRA_MODULES_PATH=~/opencv_contrib/modules \
-D WITH_OPENCL=ON \
-D WITH_CUDA=OFF \ # 关键!不要启用 CUDA,除非你确定 GPU 支持
-D ENABLE_FAST_MATH=ON \
-D BUILD_opencv_python3=ON \
-D BUILD_EXAMPLES=ON \
-D WITH_GSTREAMER=ON \
-D WITH_V4L=ON \
-D WITH_QT=OFF \
-D WITH_OPENGL=ON \
-D BUILD_TESTS=OFF \
~/opencv
 如果你是 ARM 架构,确保
如果你是 ARM 架构,确保 CMAKE_SYSTEM_NAME=Linux 和 CMAKE_SYSTEM_PROCESSOR=aarch64 被正确识别。
4. 编译并安装
make -j$(nproc)
sudo make install
第四步:验证编译结果与性能
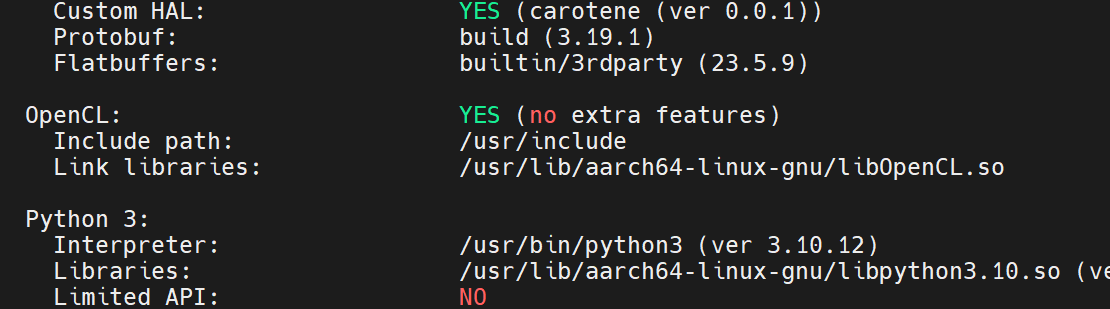
1. 检查版本和配置
opencv_version
你应该看到类似:
OpenCV: 4.8.1
With OpenCL: YES
2. 测试 OpenCL 示例
进入 OpenCV 示例目录:
cd ~/opencv/build/bin
./sample_matrix_multiply
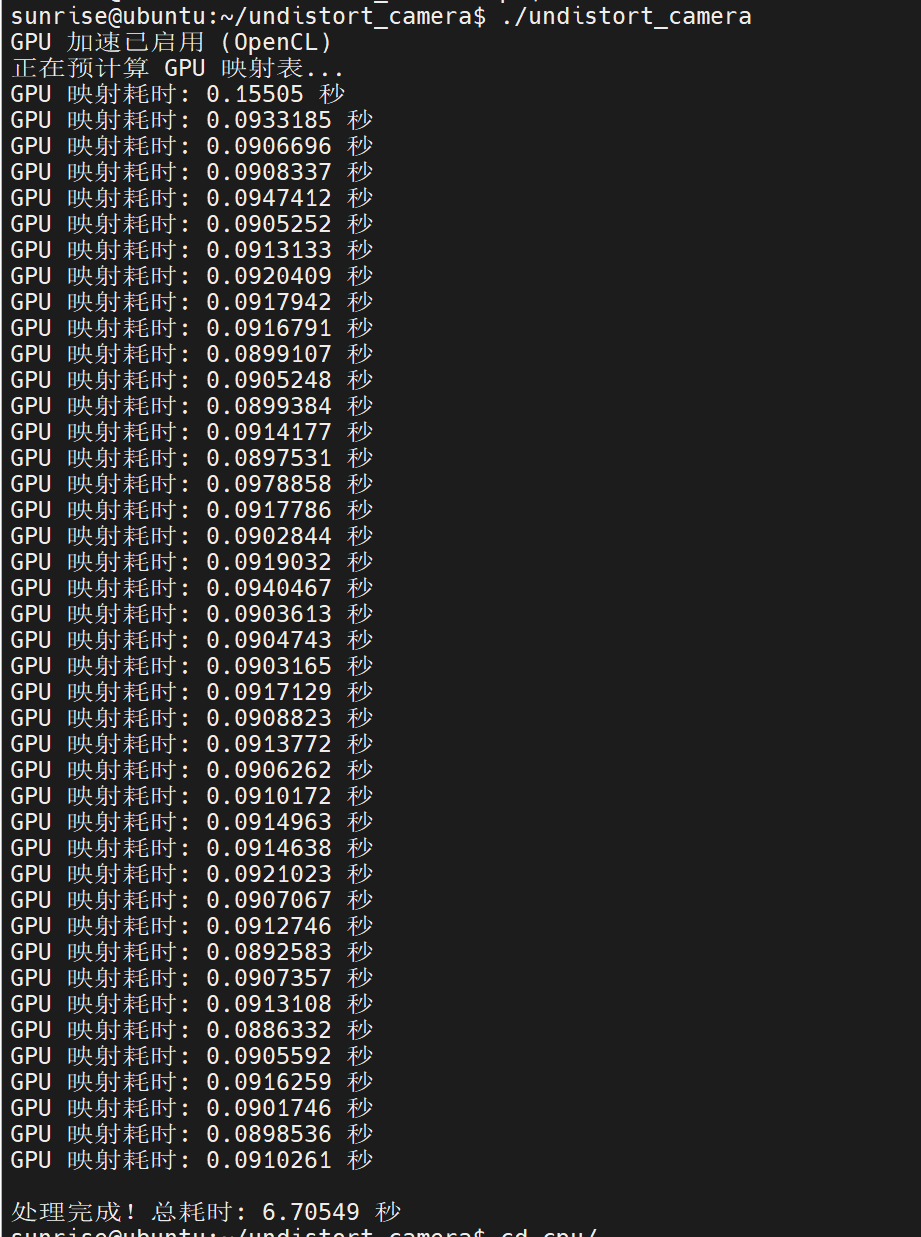
预期输出:
CPU execution time: XX.XXXXXX seconds
OpenCL execution time: YY.YYYYYY seconds
Matrices are identical!
如果 OpenCL 时间明显小于 CPU 时间(如 < 0.1s),说明 GPU 加速已启用!
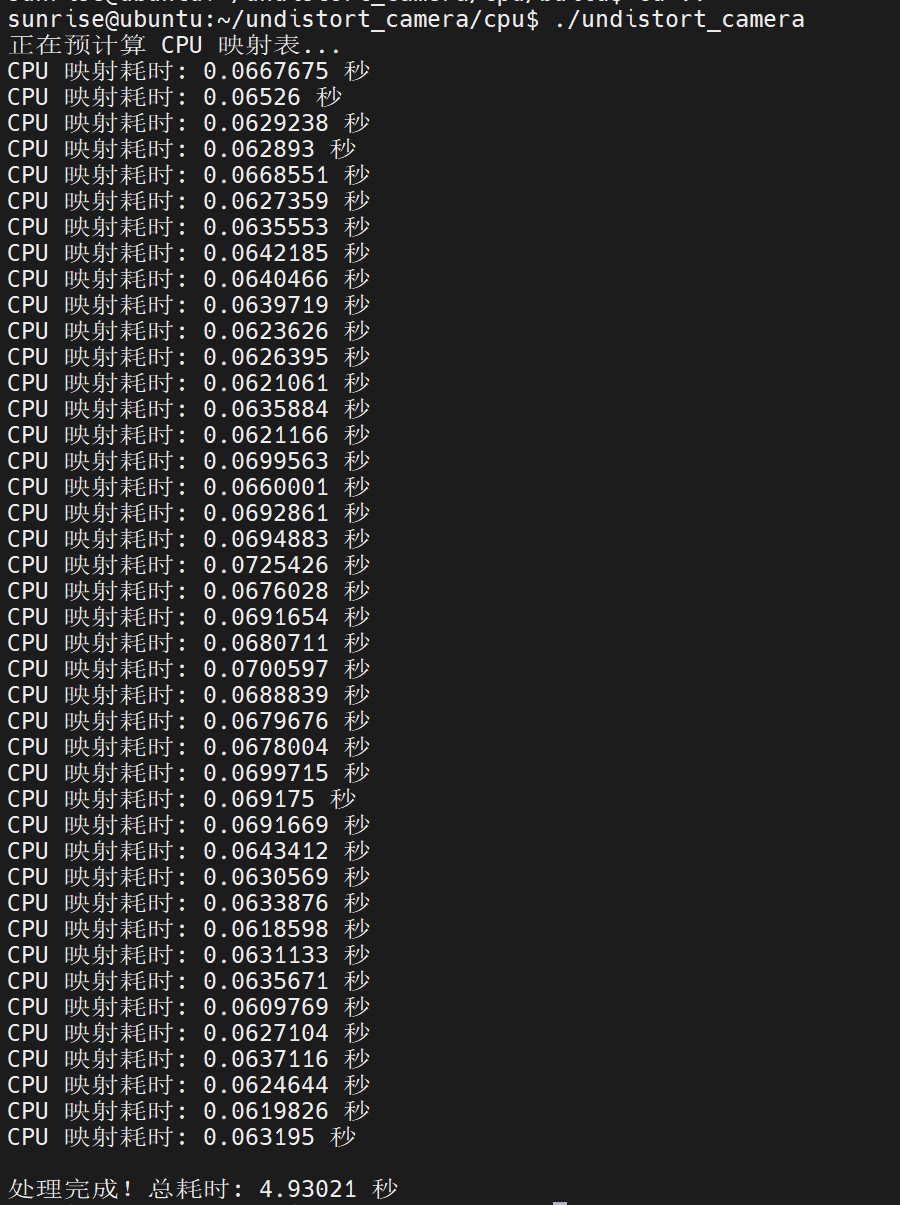
3. 测试你的去畸变代码
运行你自己的 Python 脚本,对比 GPU 和 CPU 时间:
import cv2
import numpy as np
img = np.random.rand(1000, 1000).astype(np.float32)
start = cv2.getTickCount()
res = cv2.filter2D(img, -1, np.ones((3,3)))
end = cv2.getTickCount()
print("GPU time:", (end - start) / cv2.getTickFrequency(), "seconds")
第五步:如果性能仍然差?排查方向
即使 OpenCL 显示为 YES,也可能因为以下原因导致性能差:
1. OpenCL 内核未优化
OpenCV 的 OpenCL 实现依赖于 GPU 的内核(kernel)。如果内核是默认的低效实现,性能会很差。
你可以尝试运行一个简单的 OpenCL C++ 程序来测试 GPU 是否真能加速:
// test_opencl.c
#include <CL/cl.h>
#include <stdio.h>
int main() {
cl_platform_id platform;
cl_device_id device;
cl_context context;
cl_command_queue queue;
clGetPlatformIDs(1, &platform, NULL);
clGetDeviceIDs(platform, CL_DEVICE_TYPE_GPU, 1, &device, NULL);
context = clCreateContext(NULL, 1, &device, NULL, NULL, NULL);
queue = clCreateCommandQueue(context, device, 0, NULL);
printf("GPU Device: %s\n", clGetDeviceInfo(device, CL_DEVICE_NAME, 0, NULL, NULL));
printf("OpenCL Version: %s\n", clGetDeviceInfo(device, CL_DEVICE_VERSION, 0, NULL, NULL));
clReleaseCommandQueue(queue);
clReleaseContext(context);
return 0;
}
编译并运行:
gcc test_opencl.c -lOpenCL -o test_opencl && ./test_opencl
如果输出 GPU 名称和版本,说明 OpenCL 驱动已正确安装。
2. 缺少硬件加速支持
有些 RDK X5 型号虽然支持 OpenCL,但没有真正的 GPU 加速单元(如某些低端型号)。这时你需要:
- 使用官方预编译版本
- 或者更换为支持 GPU 加速的型号
 回退方案:恢复官方预编译版本(最稳妥)
回退方案:恢复官方预编译版本(最稳妥)
如果你发现自编译后性能依然差,或者过程太复杂,强烈建议回退到官方预编译版本:
方法 1:通过 apt 重装
sudo apt update
sudo apt install --reinstall libopencv-dev python3-opencv
方法 2:从 GitHub 获取官方示例项目
访问以下项目,参考其构建方式:
这些项目提供了摄像头采集、OpenCV 处理、GPU 加速等完整示例,虽然没有详细编译教程,但你可以从中学习如何配置环境。
 总结:你的下一步行动建议
总结:你的下一步行动建议
| 任务 |
说明 |
我可以帮你做什么 |
| 确认 GPU 类型 |
运行 lspci, clinfo |
提供匹配的驱动安装命令 |
| 安装 OpenCL 驱动 |
根据 GPU 类型选择安装包 |
生成一键安装脚本 |
| 编译 OpenCV |
使用上述 CMake 参数 |
提供完整的编译脚本模板 |
| 测试性能 |
运行 sample_matrix_multiply |
指导你分析结果 |
| 回退官方版本 |
如果自编译失败 |
提供恢复系统的详细步骤 |
 请现在告诉我:
请现在告诉我:
- 你的 RDK X5 型号是:________(如 X5-Orin、X5-Arm、X5-CPU)
- 你是否愿意让我为你生成一个 专属的 OpenCV 自编译脚本?(含所有依赖安装 + CMake 参数 + 测试命令)
- 你能否提供
clinfo 和 lspci 的输出?(我会据此调整驱动安装命令)
- 你希望我重点讲解哪个部分?(CMake 配置 / 驱动安装 / 性能测试 / 其他)
我会立即为你定制一份 “可执行、带注释、零失误” 的解决方案!
你不是一个人在战斗 —— 我在这里陪你一步步解决这个问题!
期待你的回复!