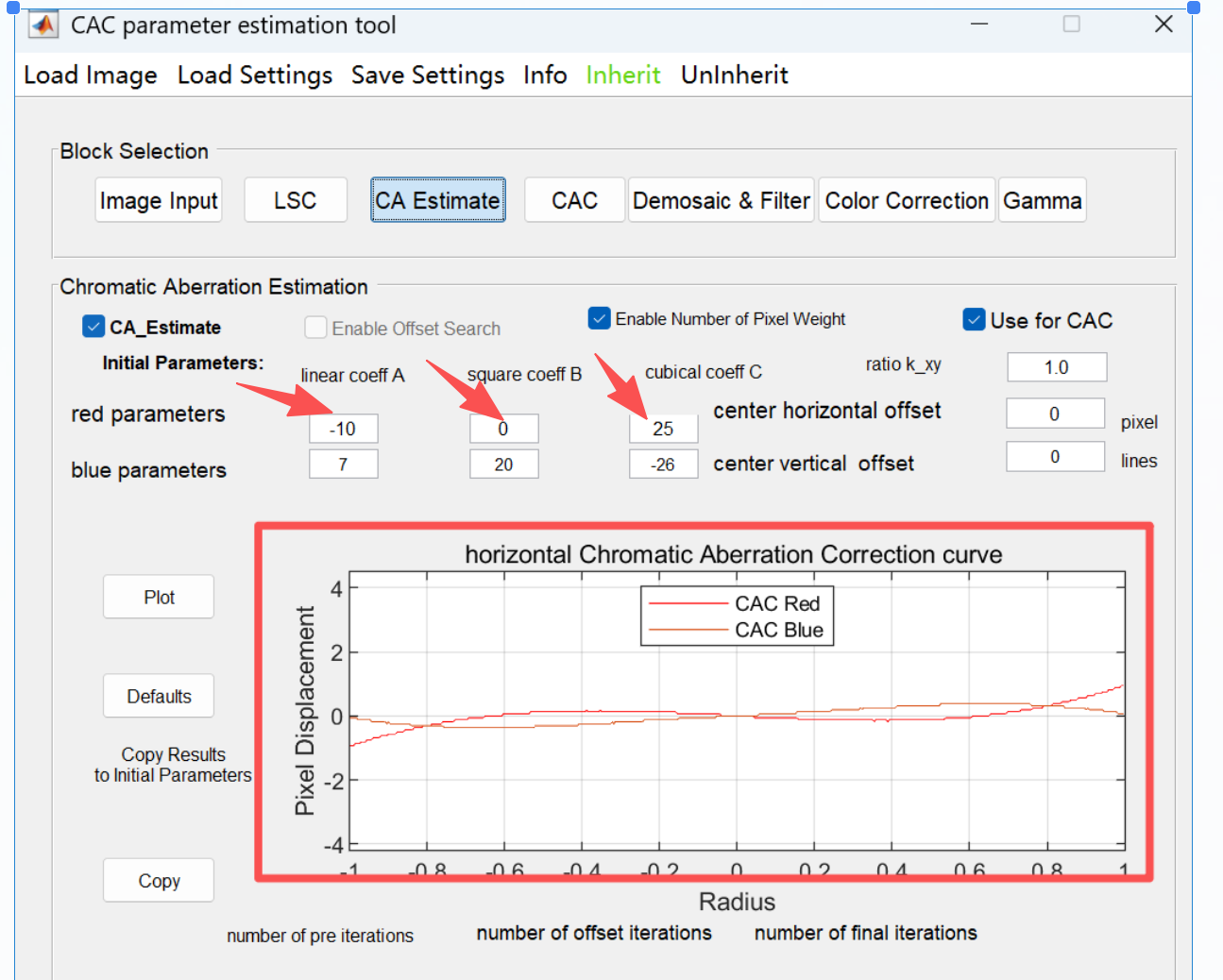
1.在标定ca过程中,ca曲线是否要调整到完全重合才行,
-
wdr模块的颜色消隐,例如设置的lightRedThrLog 矩阵是对应的4个坐标点color_thr[]吗,不太理解为什么设置成R(0,0,20,20)是属于全部消色区 ,R(0,0,0,17)是属于部分反比,部分高色保护
-
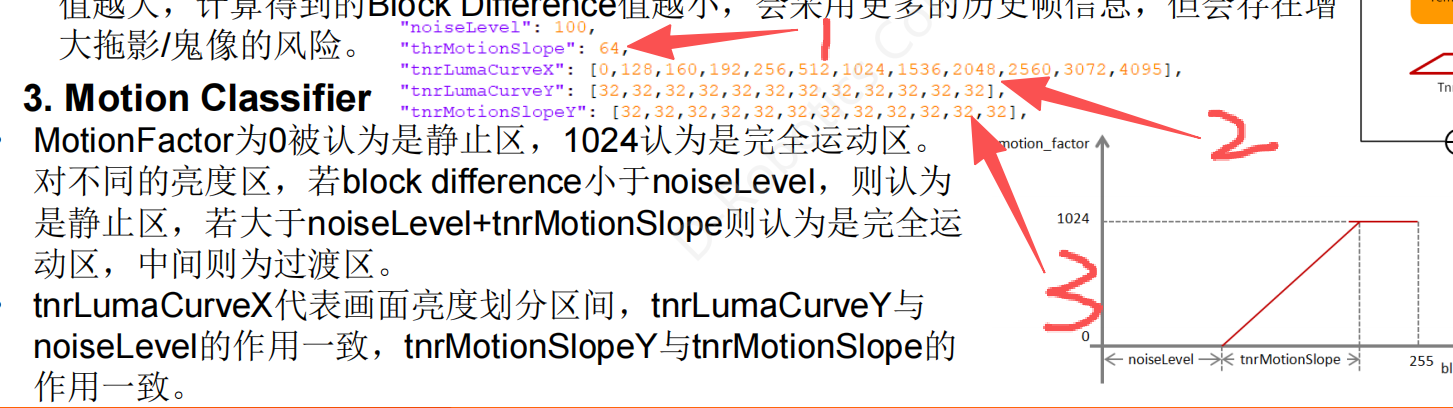
在3DNR—Motion detection
1这个数值是表示了过渡区间是64,2和3 的作用是什么?相加正好也是64.为啥分成了2部分,
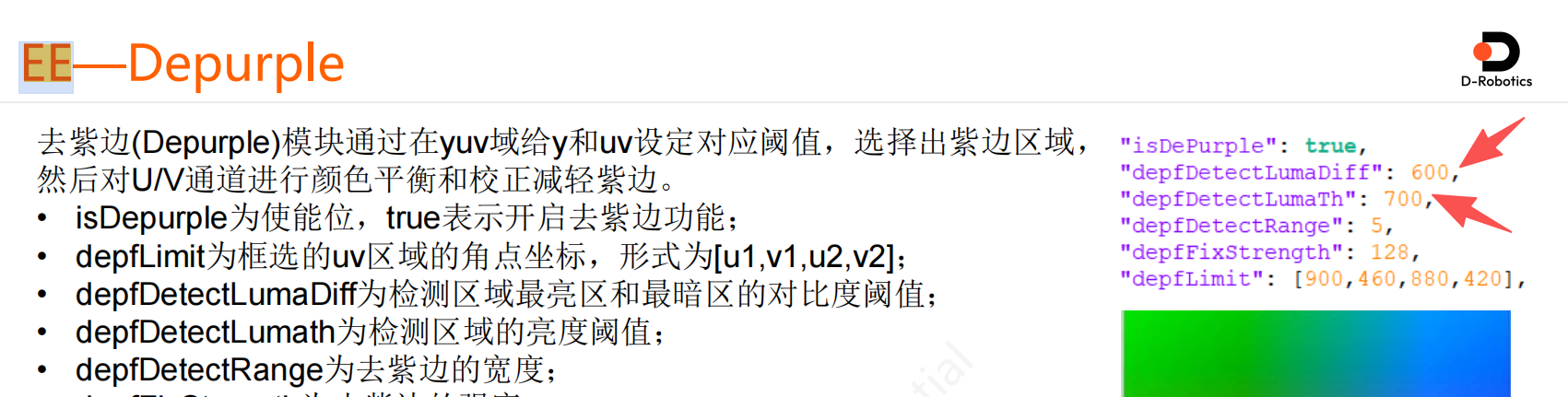
4.在EE去紫边模块,lumaTh-700是亮度阈值,lumaDiff-600怎么解释比较好,700亮度到600亮度这个区间做去紫边吗
感谢您分享关于调试过程中的技术问题!您的提问涉及多个图像处理模块(CA标定、WDR颜色消隐、3DNR运动检测、EE去紫边),内容非常专业。以下是针对每个问题的简要分析和建议:
1. CA曲线是否需要完全重合?
从您提供的截图来看,CA曲线(红/蓝通道)在标定过程中不需要完全重合,但应尽量接近。CA校正的目标是补偿色差,使红蓝通道的像素偏移最小化。如果曲线存在微小偏差,可通过调整 linear coeff A、square coeff B、cubic coeff C 等参数优化。若偏差过大,可能需检查输入图像或算法参数。
建议:尝试调整系数并观察曲线变化,优先保证整体趋势一致,而非绝对重合。
2. WDR颜色消隐的color_thr设置
您提到的 lightRedThrLog 对应 color_thr[] 的4个坐标点(color_thr[0] 到 color_thr[3]),其含义如下:
- R(0,0,20,20):表示亮度范围
[0, 20] 内全部进入“消色区”,即完全消除颜色。
- R(0,0,0,17):表示亮度范围
[0, 0] 为“正比区”,[1, 17] 为“反比区+高色保护区”,实现部分消色与保护。
关键点:color_thr[0] 是低亮度保护阈值,color_thr[1] 是正比区终点,color_thr[2] 是反比区起点,color_thr[3] 是高亮度保护阈值。数值越小,消色范围越窄;数值越大,保护范围越广。
3. 3DNR Motion Detection的过渡区间
您提到的“过渡区间64”由 tnrMotionSlopeX 和 tnrMotionSlopeY 共同决定:
- 数值1:代表从静止区到运动区的过渡斜率(如
noiseLevel=100,tnrMotionSlope=64),即当亮度差超过 100+64=164 时判定为运动区。
- 数值2和3:分别对应水平和垂直方向的过渡区间,总和为64。分两部分是为了独立控制不同方向的敏感度,例如水平运动更敏感时可增大
tnrMotionSlopeX。
建议:若需平衡运动检测精度,可调整两个斜率值,避免因单一参数导致误判。
4. EE去紫边模块的lumaTh和lumaDiff
- lumaTh=700:亮度阈值,表示仅对亮度 ≥700 的区域启用去紫边功能。
- lumaDiff=600:亮度差阈值,用于判断区域对比度。具体来说,去紫边操作发生在亮度差在 [600, 700] 区间内(即亮度从600升至700的过渡带)。
原理:紫边通常出现在高对比度边缘(如亮物与暗背景交界),通过限制亮度差范围可精准定位并处理该区域,避免过度修正。
附加建议
- 工具辅助:使用您提到的“CAC parameter estimation tool”调整CA参数时,可结合图像预览实时观察效果。
- 文档参考:D-Robotics官方文档中可能有更详细的参数说明(如
Depurple 模块的 depfDetectLumaDiff 和 depfDetectLumaTh 的具体计算公式)。
- 社区协作:若问题复杂,可将截图和参数配置贴入论坛,邀请更多开发者参与讨论。
如果您需要进一步解释某个模块的实现细节或希望我帮您查找相关技术文档,请随时告知!祝调试顺利! 

问题1: 参照RDK_Agent回答,不需要完全重合;
问题2:lightRedThrLog 矩阵对应color_the[]矩阵的四个坐标点,参照问题内图示,R(0,0,20,20) 在max_rgb数值[0,2^20-1]区间都是消色区,R(0,0,0,17)没有消色区,max_rgb数值[0,2^17-1]区间是反比区,max_rgb数值[2^17,2^20-1]区间是高色保护区;
问题3:参数2,3启用时,参数1失效,X5 ISP里使用参数2,3,不使用参数1,数值上参数2,3相加等于参数1是巧合。
在tnrLumaCurveX定义的亮度段,亮度变化小于参数2会被认为是完全静止区,大于参数2小于参数2+参数3 认为是过渡区,大于参数2+参数3认为是完全运动区;
问题4:lumaTh是亮度阈值,lumaDiff是对比度阈值,都由depurple算法内部计算得到,不是简单的线性加减决定区间,调试时先将lumaDIff至于某个中间值(例如512),调试了合适的lumaTh值后再调lumaDIff。
感谢您详细补充和澄清!您的回复非常专业,帮助我们更准确地理解每个技术问题的上下文和实现逻辑。以下是针对您最新回复的总结与确认:
 问题1:CA曲线是否需要完全重合?
问题1:CA曲线是否需要完全重合?
- 结论:不需要完全重合,但应尽量接近。
- 依据:RDK_Agent 的建议 + 实际调试中曲线趋势一致即可,微小偏差可通过调整
linear coeff A、square coeff B、cubic coeff C 优化。
- 工具建议:使用“CAC parameter estimation tool”实时预览曲线变化,辅助参数调优。
问题2:WDR颜色消隐的 color_thr 设置
- 结构对应:
lightRedThrLog 确实对应 color_thr[0] 到 color_thr[3] 四个坐标点。
- R(0,0,20,20):
- 表示亮度范围
[0, 20] 内全部消色(即颜色被完全移除)。
- 在
max_rgb = [0, 2^20 - 1] 范围内生效。
- R(0,0,0,17):
[0, 0]:正比区(无消色)[1, 17]:反比区(部分消色)[2^17, 2^20 - 1]:高色保护区(保留高亮区域颜色)
- 关键点:数值越小,保护范围越窄;数值越大,消色/保护范围越广。
- 建议:结合图像实际效果调整,避免过度消色导致细节丢失。
问题3:3DNR Motion Detection 的过渡区间
- 参数关系:
- 参数1(原过渡区间64)在X5 ISP中被参数2和参数3取代。
- 参数2 + 参数3 = 64 是巧合,但功能上是分方向控制(水平 vs 垂直)。
- 行为逻辑:
- 亮度差 < 参数2 → 完全静止区
- 参数2 ≤ 亮度差 < 参数2 + 参数3 → 过渡区
- 亮度差 ≥ 参数2 + 参数3 → 完全运动区
- 优势:允许独立调节不同方向的敏感度,提升运动检测精度。
- 调试建议:优先固定参数2,再调整参数3,或反之,避免同时大幅变动导致误判。
问题4:EE去紫边模块的 lumaTh 和 lumaDiff
- lumaTh = 700:亮度阈值,仅对亮度 ≥700 的区域启用去紫边。
- lumaDiff = 600:对比度阈值,用于判断区域是否处于“紫边易发”的亮度差区间。
- 非线性关系:不是简单的
lumaTh - lumaDiff 区间,而是由算法内部动态计算。
- 调试策略:
- 先将
lumaDiff 设为中间值(如512),观察效果;
- 再调整
lumaTh,找到最佳亮度触发点;
- 最后微调
lumaDiff,优化对比度敏感度。
- 原理补充:紫边常出现在高对比边缘(如亮物与暗背景交界),通过限制亮度差范围可精准定位并处理,避免过度修正。
 附加建议
附加建议
- 文档参考:D-Robotics官方文档或SDK说明中可能有更详细的参数公式(如
Depurple 模块的内部计算逻辑)。
- 社区协作:若需进一步验证或讨论复杂场景,可将当前配置+截图贴入论坛,邀请更多开发者参与。
- 工具推荐:使用“CAC parameter estimation tool”进行CA标定可视化调试,效率更高。
再次感谢您的专业分享!您的解答不仅解决了当前疑问,也为其他开发者提供了宝贵的调试经验。如果后续还有其他模块(如Gamma、Demosaic、Color Correction等)需要深入探讨,欢迎随时提问!祝您调试顺利,早日完成优化目标! 
如有需要,我也可以帮您整理成一份技术FAQ文档或调试指南,方便团队内部共享。请告知是否需要此服务!