当你对机器人说,前进。机器人滴滴答答的跑步前进。
当你对机器人说,后退。机器人滴滴答答的离你远去。
当你对机器人说,声音大点,机器人会自动调节音量吗?
当你对机器人说,声音小点,机器人会自动调小音量吗?
机器人要怎样才能听懂我们说的话?
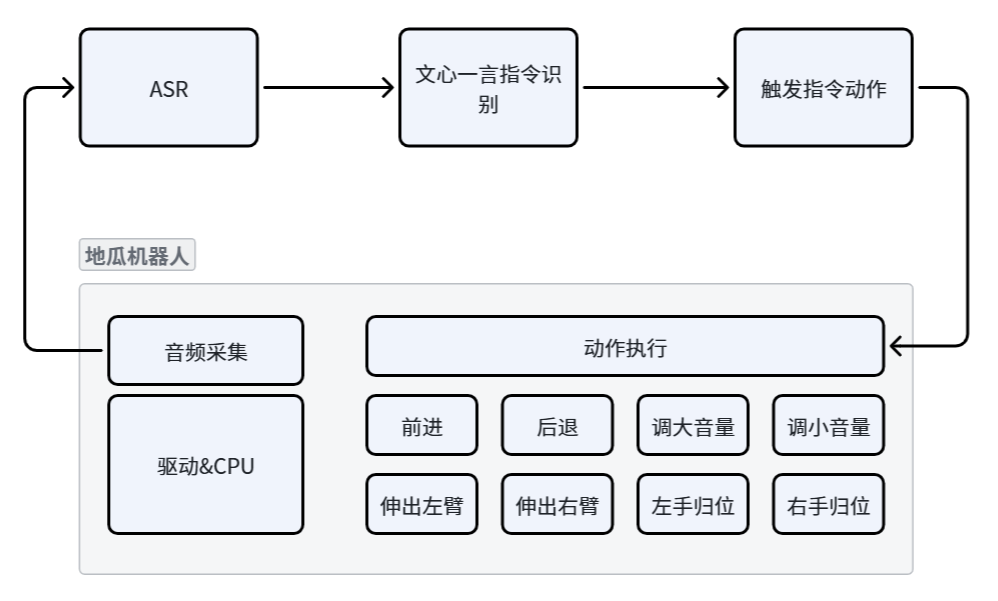
现在,实现上述功能可以分为3个步骤:
- 通过ASR,把我们的语音信号转换为文本。
- 基于文心一言大模型,把上述文本输入到文心一言大模型来判断我们指令动作;
- 基于上述指令,调度机器人本体相关单元功能完成指定动作。
整体功能框图如下:
一、ASR识别
- 开源选择:wav2vec2、whisper、zipformer
- 商业化选择:讯飞语音听写,火山引擎
开源的可以自己在X5上部署;商业化的选择就是稳定。
这里展示讯飞语音听写接入示例,本地部署或接入其他的示例都一致。
# -*- coding:utf-8 -*-
#
# author: iflytek
#
# 本demo测试时运行的环境为:Windows + Python3.7
# 本demo测试成功运行时所安装的第三方库及其版本如下,您可自行逐一或者复制到一个新的txt文件利用pip一次性安装:
# cffi==1.12.3
# gevent==1.4.0
# greenlet==0.4.15
# pycparser==2.19
# six==1.12.0
# websocket==0.2.1
# websocket-client==0.56.0
#
# 语音听写流式 WebAPI 接口调用示例 接口文档(必看):https://doc.xfyun.cn/rest_api/语音听写(流式版).html
# webapi 听写服务参考帖子(必看):http://bbs.xfyun.cn/forum.php?mod=viewthread&tid=38947&extra=
# 语音听写流式WebAPI 服务,热词使用方式:登陆开放平台https://www.xfyun.cn/后,找到控制台--我的应用---语音听写(流式)---服务管理--个性化热词,
# 设置热词
# 注意:热词只能在识别的时候会增加热词的识别权重,需要注意的是增加相应词条的识别率,但并不是绝对的,具体效果以您测试为准。
# 语音听写流式WebAPI 服务,方言试用方法:登陆开放平台https://www.xfyun.cn/后,找到控制台--我的应用---语音听写(流式)---服务管理--识别语种列表
# 可添加语种或方言,添加后会显示该方言的参数值
# 错误码链接:https://www.xfyun.cn/document/error-code (code返回错误码时必看)
# # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # #
import websocket
import datetime
import hashlib
import base64
import hmac
import json
from urllib.parse import urlencode
import time
import ssl
from wsgiref.handlers import format_date_time
from datetime import datetime
from time import mktime
import _thread as thread
STATUS_FIRST_FRAME = 0 # 第一帧的标识
STATUS_CONTINUE_FRAME = 1 # 中间帧标识
STATUS_LAST_FRAME = 2 # 最后一帧的标识
class Ws_Param(object):
# 初始化
def __init__(self, APPID, APIKey, APISecret, AudioFile):
self.APPID = APPID
self.APIKey = APIKey
self.APISecret = APISecret
self.AudioFile = AudioFile
# 公共参数(common)
self.CommonArgs = {"app_id": self.APPID}
# 业务参数(business),更多个性化参数可在官网查看
self.BusinessArgs = {"domain": "iat", "language": "zh_cn", "accent": "mandarin", "vinfo":1,"vad_eos":10000}
# 生成url
def create_url(self):
url = 'wss://ws-api.xfyun.cn/v2/iat'
# 生成RFC1123格式的时间戳
now = datetime.now()
date = format_date_time(mktime(now.timetuple()))
# 拼接字符串
signature_origin = "host: " + "ws-api.xfyun.cn" + "\n"
signature_origin += "date: " + date + "\n"
signature_origin += "GET " + "/v2/iat " + "HTTP/1.1"
# 进行hmac-sha256进行加密
signature_sha = hmac.new(self.APISecret.encode('utf-8'), signature_origin.encode('utf-8'),
digestmod=hashlib.sha256).digest()
signature_sha = base64.b64encode(signature_sha).decode(encoding='utf-8')
authorization_origin = "api_key=\"%s\", algorithm=\"%s\", headers=\"%s\", signature=\"%s\"" % (
self.APIKey, "hmac-sha256", "host date request-line", signature_sha)
authorization = base64.b64encode(authorization_origin.encode('utf-8')).decode(encoding='utf-8')
# 将请求的鉴权参数组合为字典
v = {
"authorization": authorization,
"date": date,
"host": "ws-api.xfyun.cn"
}
# 拼接鉴权参数,生成url
url = url + '?' + urlencode(v)
# print("date: ",date)
# print("v: ",v)
# 此处打印出建立连接时候的url,参考本demo的时候可取消上方打印的注释,比对相同参数时生成的url与自己代码生成的url是否一致
# print('websocket url :', url)
return url
# 收到websocket消息的处理
def on_message(ws, message):
try:
code = json.loads(message)["code"]
sid = json.loads(message)["sid"]
if code != 0:
errMsg = json.loads(message)["message"]
print("sid:%s call error:%s code is:%s" % (sid, errMsg, code))
else:
data = json.loads(message)["data"]["result"]["ws"]
# print(json.loads(message))
result = ""
for i in data:
for w in i["cw"]:
result += w["w"]
print("sid:%s call success!,data is:%s" % (sid, json.dumps(data, ensure_ascii=False)))
except Exception as e:
print("receive msg,but parse exception:", e)
# 收到websocket错误的处理
def on_error(ws, error):
print("### error:", error)
# 收到websocket关闭的处理
def on_close(ws,a,b):
print("### closed ###")
# 收到websocket连接建立的处理
def on_open(ws):
def run(*args):
frameSize = 8000 # 每一帧的音频大小
intervel = 0.04 # 发送音频间隔(单位:s)
status = STATUS_FIRST_FRAME # 音频的状态信息,标识音频是第一帧,还是中间帧、最后一帧
with open(wsParam.AudioFile, "rb") as fp:
while True:
buf = fp.read(frameSize)
# 文件结束
if not buf:
status = STATUS_LAST_FRAME
# 第一帧处理
# 发送第一帧音频,带business 参数
# appid 必须带上,只需第一帧发送
if status == STATUS_FIRST_FRAME:
d = {"common": wsParam.CommonArgs,
"business": wsParam.BusinessArgs,
"data": {"status": 0, "format": "audio/L16;rate=16000",
"audio": str(base64.b64encode(buf), 'utf-8'),
"encoding": "raw"}}
d = json.dumps(d)
ws.send(d)
status = STATUS_CONTINUE_FRAME
# 中间帧处理
elif status == STATUS_CONTINUE_FRAME:
d = {"data": {"status": 1, "format": "audio/L16;rate=16000",
"audio": str(base64.b64encode(buf), 'utf-8'),
"encoding": "raw"}}
ws.send(json.dumps(d))
# 最后一帧处理
elif status == STATUS_LAST_FRAME:
d = {"data": {"status": 2, "format": "audio/L16;rate=16000",
"audio": str(base64.b64encode(buf), 'utf-8'),
"encoding": "raw"}}
ws.send(json.dumps(d))
time.sleep(1)
break
# 模拟音频采样间隔
time.sleep(intervel)
ws.close()
thread.start_new_thread(run, ())
if __name__ == "__main__":
# 测试时候在此处正确填写相关信息即可运行
time1 = datetime.now()
wsParam = Ws_Param(APPID='xxxxx', APISecret='xxxxx',
APIKey='xxxxx',
AudioFile=r'xxxxx')
websocket.enableTrace(False)
wsUrl = wsParam.create_url()
ws = websocket.WebSocketApp(wsUrl, on_message=on_message, on_error=on_error, on_close=on_close)
ws.on_open = on_open
ws.run_forever(sslopt={"cert_reqs": ssl.CERT_NONE})
time2 = datetime.now()
print(time2-time1)
二、文心一言指令识别
实现本功能的核心,因此这里就选择文心一言模型,注册地址: 百度千帆 - 百度智能云控制台。
本次选择ERNIE Lite Pro,接入示例如下:
import requests
import json
system_prompt='''你是一个意图识别助手,需要根据用户输入判断其是否属于以下指令之一。如果是,返回指令名称;否则返回"未知指令"。
**需识别的指令列表**:
- 前进
- 后退
- 调大音量
- 调小音量
- 伸出左臂
- 伸出右臂
- 左手归位
- 右手归位
**输入要求**:
1. 直接分析用户输入的文本,无需额外解释。
2. 输出必须为严格的 JSON 格式,包含以下字段:
- `intent`: 识别到的指令名称(字符串),若未匹配则返回 `"未知指令"`
- `confidence`: 可选,置信度分数(0-1之间的浮点数,若模型支持)
**示例 1**:
用户输入:把声音调大一点
输出:
```json
{
"intent": "调大音量",
"confidence": 0.95
}
'''
def main(user_input):
url = "https://qianfan.baidubce.com/v2/chat/completions"
payload = json.dumps({
"model": "am-g92q3t5855zd",
"messages": [
{
"role": "system",
"content": f"{system_prompt]"
},
{
"role": "user",
"content": f"{user_input}"
}
]
})
headers = {
'Content-Type': 'application/json',
'Authorization': 'Bearer bce-v3/ALTAK-*********/614fb**********'
}
response = requests.request("POST", url, headers=headers, data=payload)
print(response.text)
if __name__ == '__main__':
user_input = r'请将右手放回原位 '
main(user_input)
记得填入模型的id

三、机器人执行动作
根据大模型返回的动作序列,机器人在本地执行对应的动作。这部分只需要在X5上调用对应ROS执行接口就可以了。