大家好,我是凌不凌凌,为什么我的用户名叫凌不凌凌呢,这要从我的高三说起了(此处省略1000字)。
好啦,下面我就分享一下我对咱们地瓜机器人的新产品RDK X5的到手测评。
刚到手的时候还是有很多不懂的地方的,比如系统镜像烧录就弄了很久,试过了官方给的镜像烧录软件,但是最后还是没有烧录成功,最后在孵化营的朋友的帮助下下载了这个软件,可以不用安装直接使用的一个软件,这里也推荐给大家,非常好用!
软件名:balenaEtcher-Portable
下载方式:CSDN可以直接搜索软件名并下载
图标如下

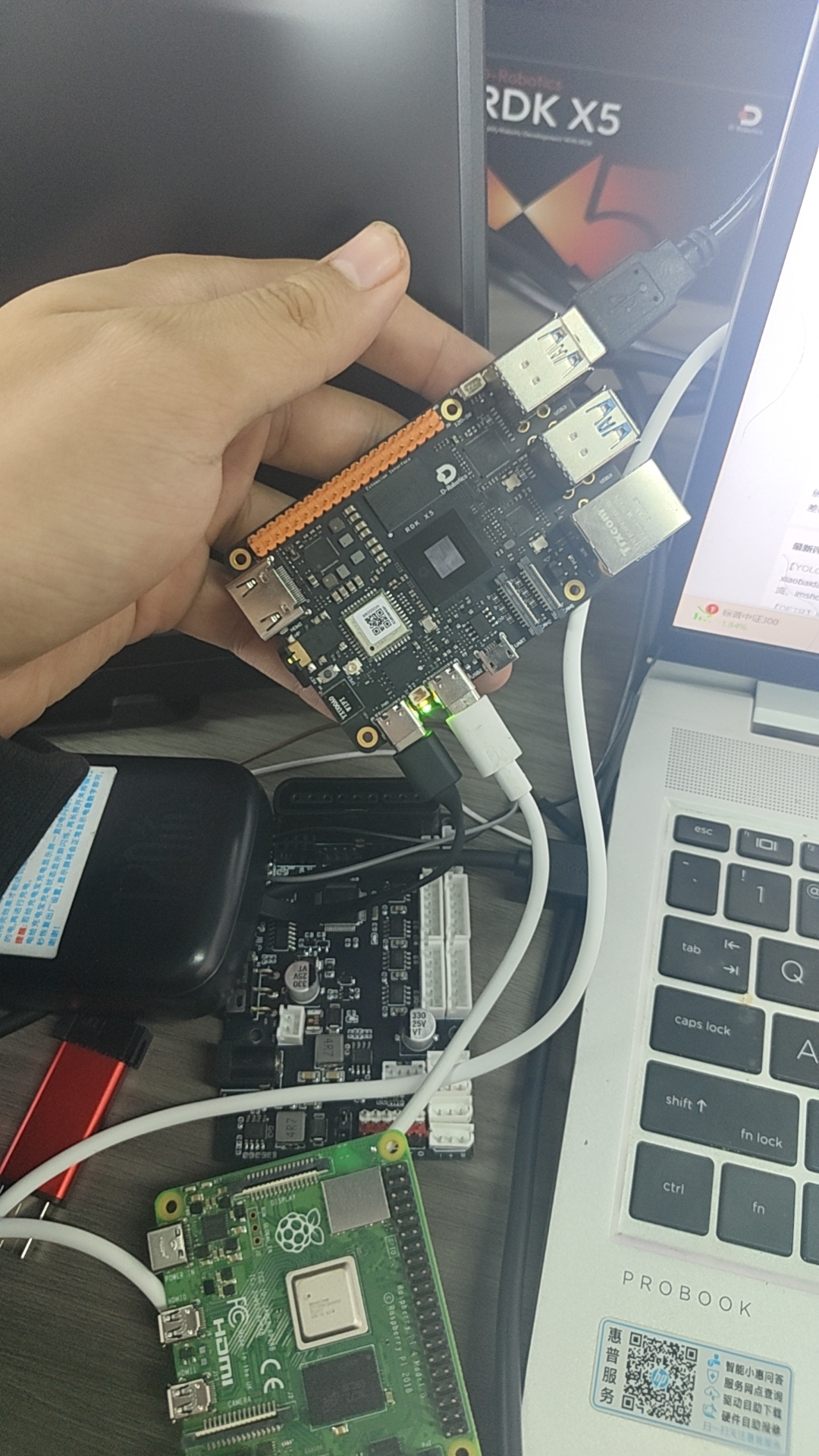
然后就是闪连了,闪连这里推荐友友的一篇论坛文
闪连属于RDK X5的一大特色了,不需要特别杂乱的接线,只需要一个电源,一个type-c的线就可以通过以太网来连接,这里再提醒一下,咱们RDK的默认ip是192.168.128.10,有涉及默认ip,要调本电脑的ip地址的时候不要调错了啊。
然后就是咱们的的RDK Suodio了(以下简称RS),RS一进去给我的第一印象就是简洁,给人一种人很舒服的感觉,可以看出来页面设计师也是花了心思的。
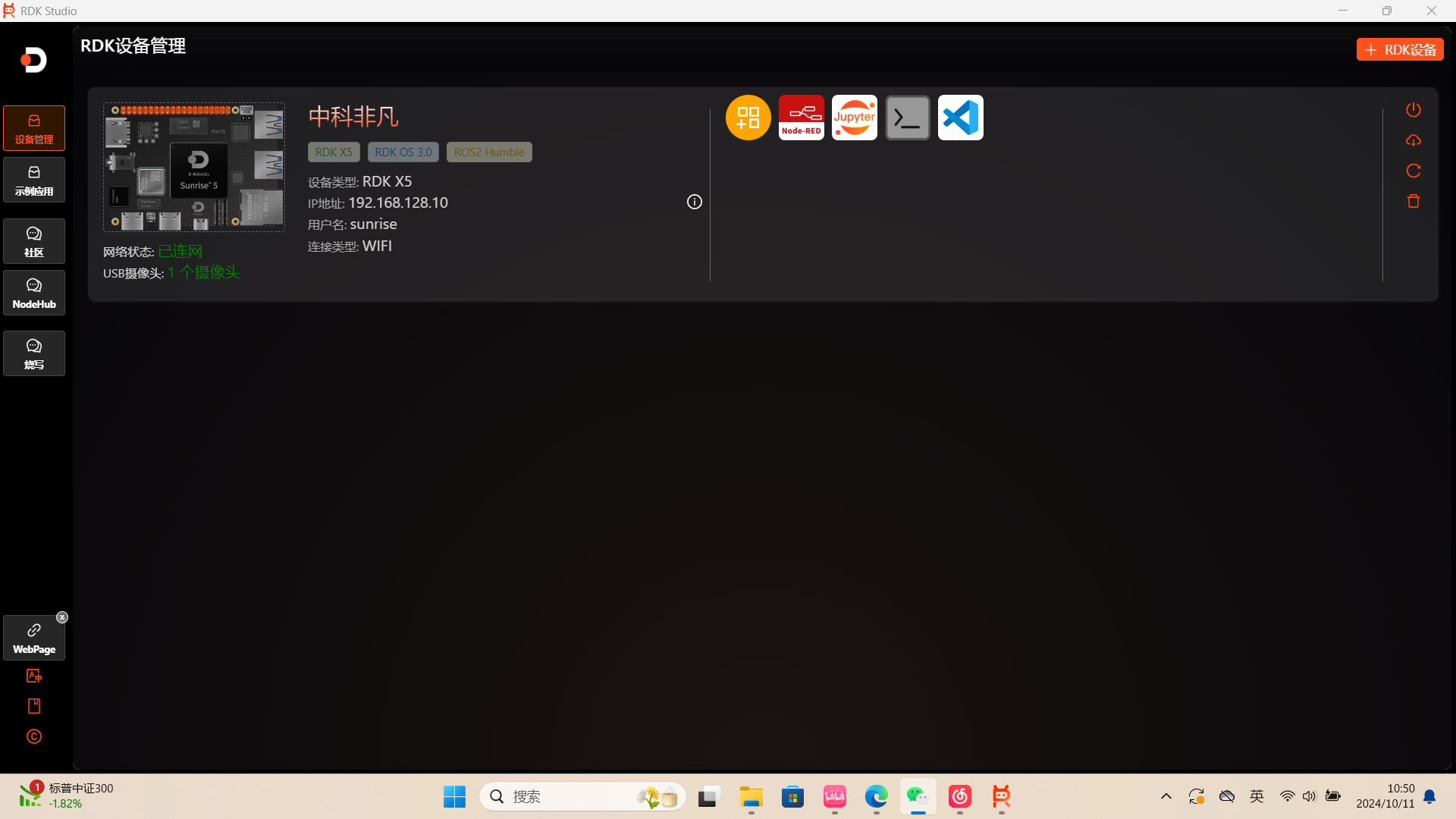
这就是RS的页面,可见我是添加了一个设备的,没有添加设备的点击右上角的,目前有三种连接方式,有线连接,闪连和ip连接,大家连接之前记得连接显示器启动系统镜像。
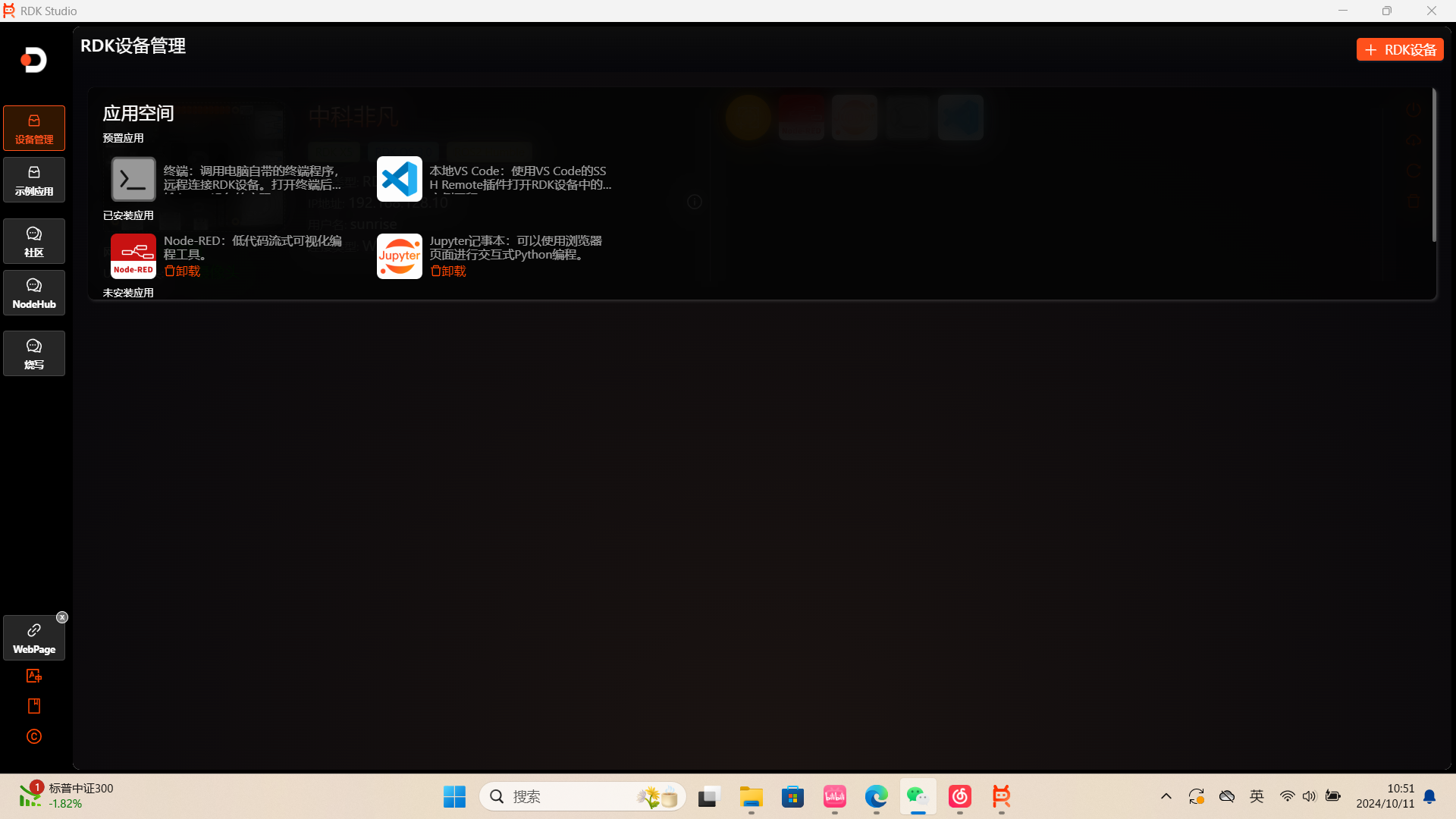
RS还有一个方便的地方就是可以在软件内部就启动终端还有VSCODE这些编程软件,大家点那个黄色的按钮就可以在RS里添加,非常方便。
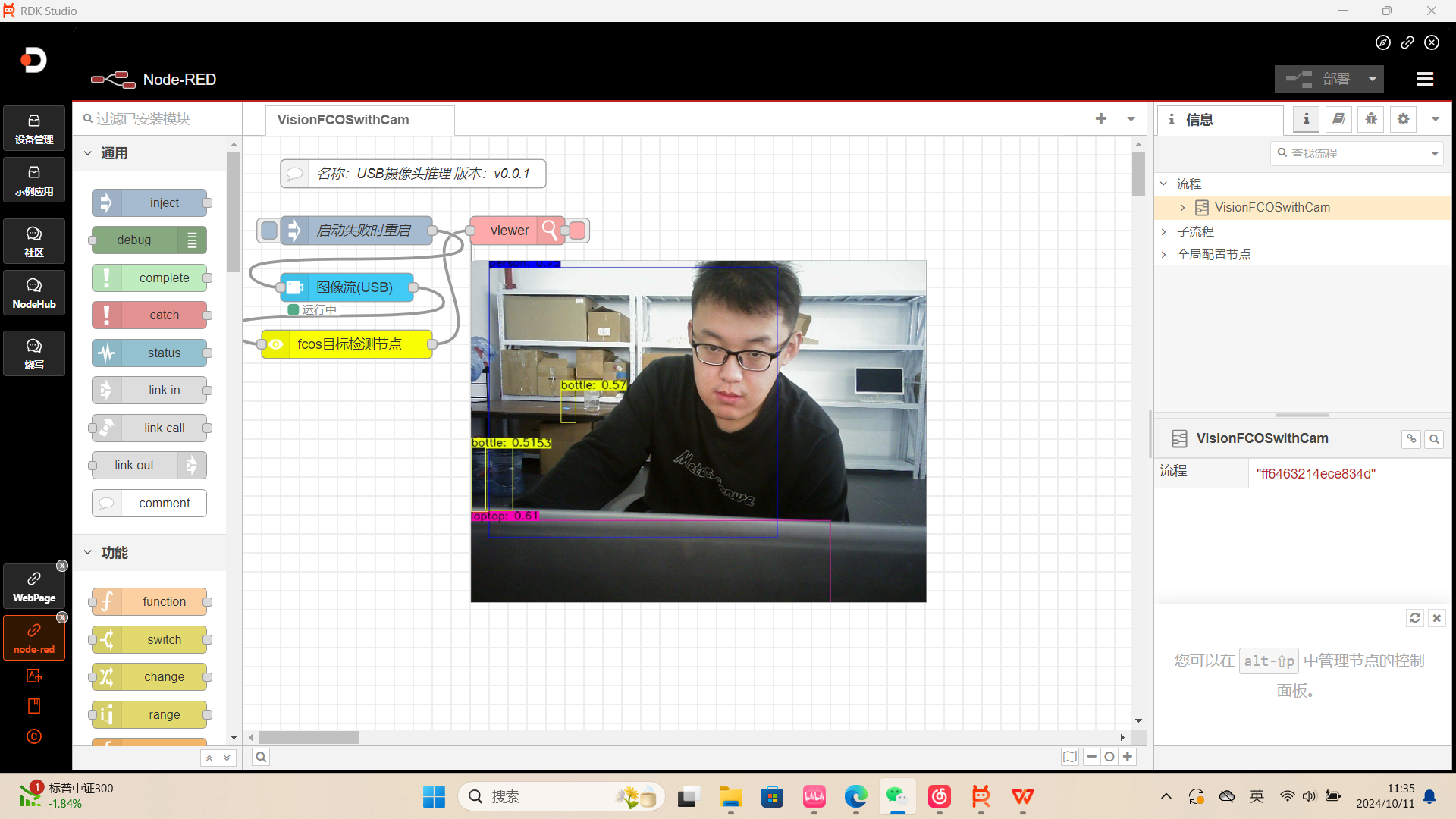
介绍一下RS的第二个功能,就是给了很多开源的示例,大多都是摄像头目标识别的,可以让新手也可以体验AI算法的有趣之处。
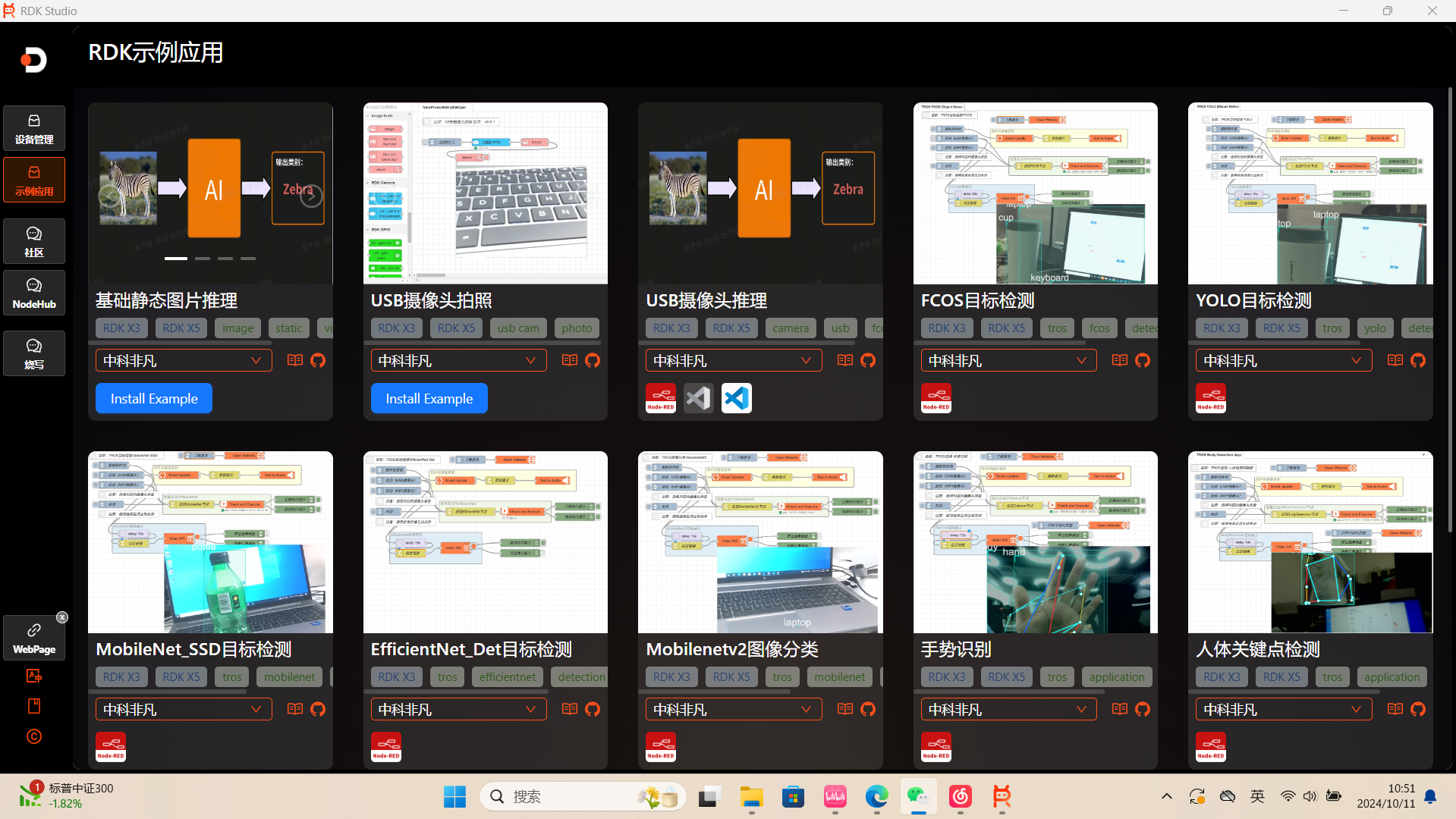
这里我就体验了一个目标识别推理的算法,只需要自己连接一个双目相机,系统就可以通过调用摄像头,再把摄像头拍到的物体发到大模型语言平台,最后大模型语言平台再把识别结果以及识别准确度返回到平台上。可以说一个简单的推理过程就可以实现一个看起来很牛逼的功能。
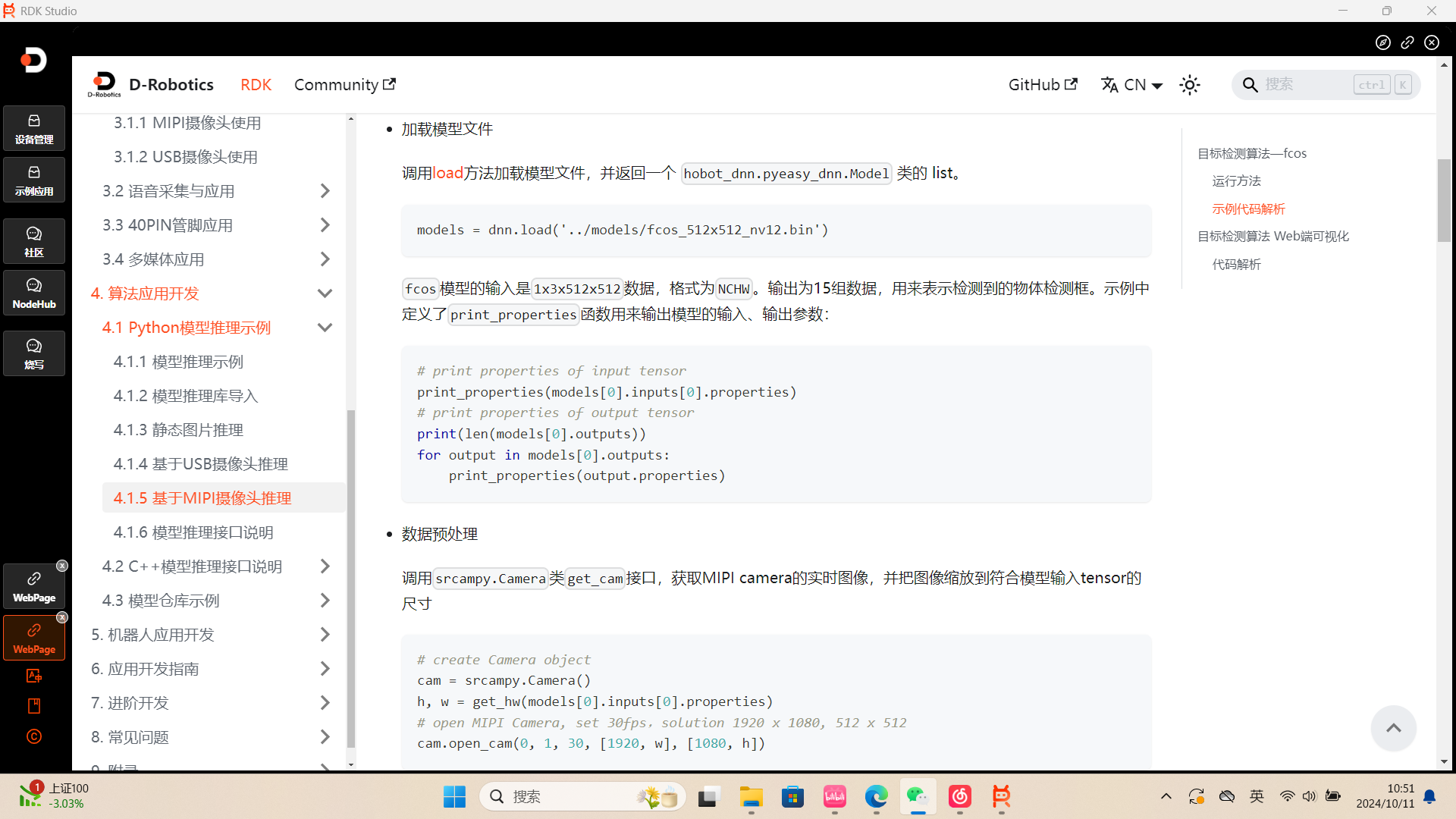
然后就是咱们地瓜机器人社区提供了非常多的学习资料,系统烧录,环境配置,摄像头的调用,我个人感觉已经讲的很详细了,昨天的地瓜孵化营的开幕式老师们说了咱们地瓜孵化营不会给他们提供很系统的学习课程,但是我觉得有手里的这些资料就够了。包括交流群里吴老师他们也一直为我们解疑答惑。可以说地瓜论坛上的资料完全足够让一名从来没接触过RDK的新手来入门了。
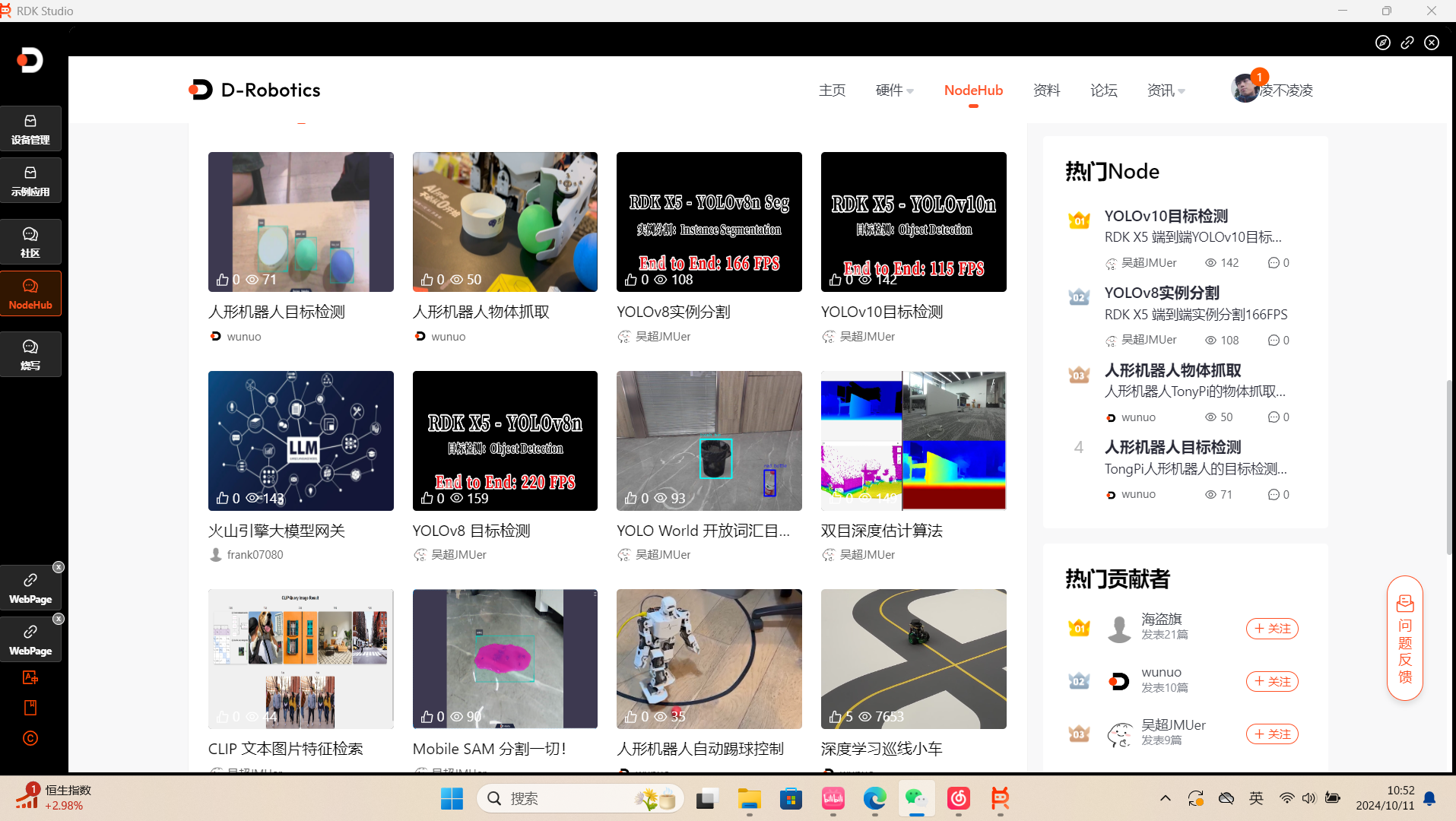
NodeHub集成了各种应用节点,开发者可以通过下载对应的安装包,快速构建具备各种功能的机器人。地平线公司基于机器人功能和应用的分类,将机器人应用分为Node和Hub,其中Node是点,Hub是面,二者组成一个网状结构,能够灵活适配不同的机器人场景。NodeHub不仅仅是一个简单的功能包集合,地平线在后台部署了一套服务器,持续地进行测试、迭代、集成、打包和封装等工作,确保平台的稳定性和更新性。在使用NodeHub进行机器人开发的过程中,我深刻感受到了其带来的便捷和高效。首先,平台的界面设计简洁明了,易于上手。其次,一键安装功能大大节省了开发时间,让我能够更快地进入开发状态。此外,开源开放的特点也让我能够根据自己的需求对应用进行定制和优化。在实际开发中,我通过组合不同的应用节点,快速实现了一个具备自主规划线路和目标检测功能的室内小型机器人。整个过程耗时不到15分钟,充分展示了NodeHub的高效性和实用性。
感谢大家的观看!