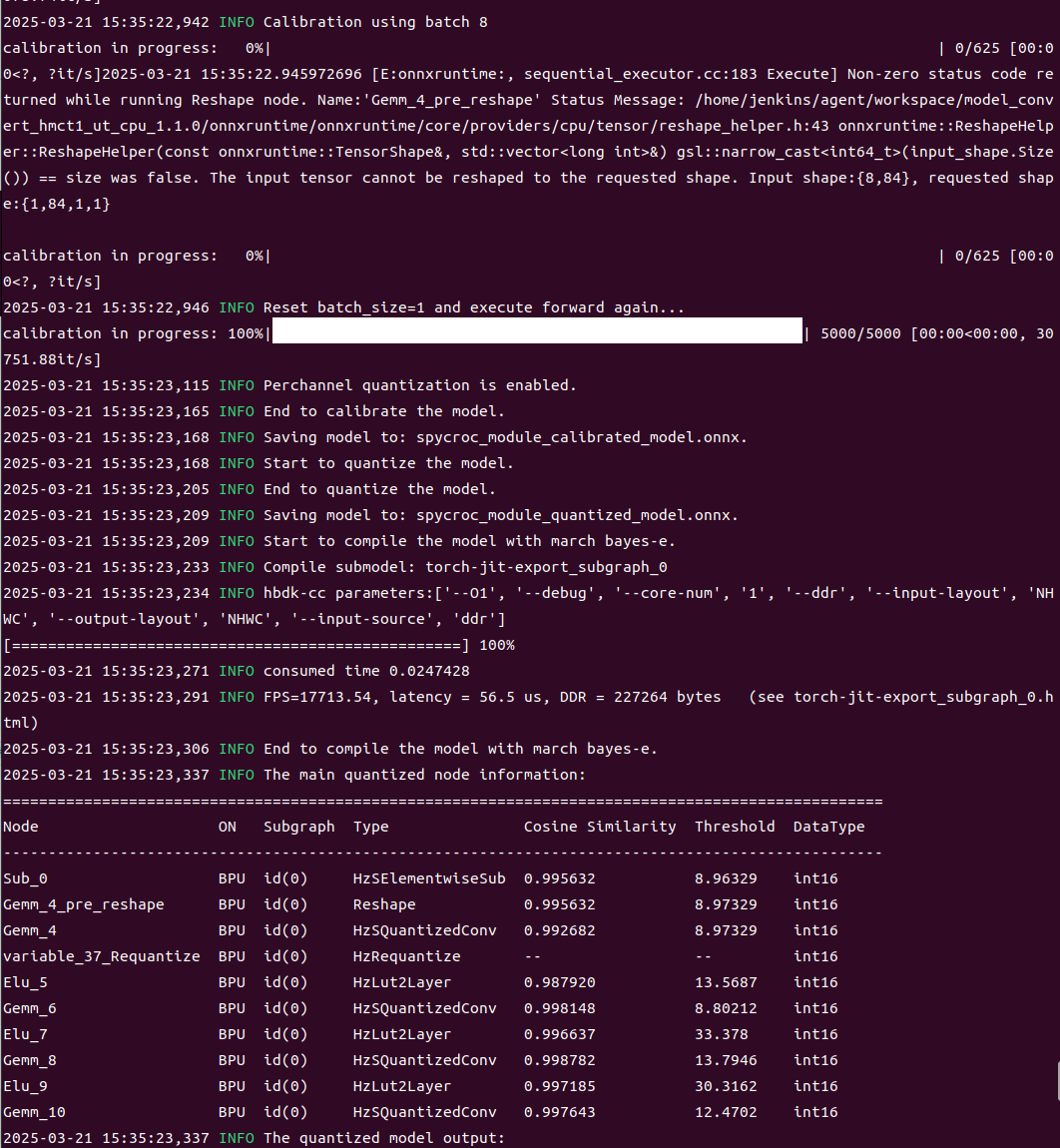
我希望可以把强化学习模型利用RDK X5进行部署,但是模型转化的效果不理想,模型运行起来和原始的onnx和pt格式的模型具有很大差异。
我是基于legged_gym框架训练的模型,的观测空间是84,输出的动作是24,模型检查和模型转换中均没有出现报错。
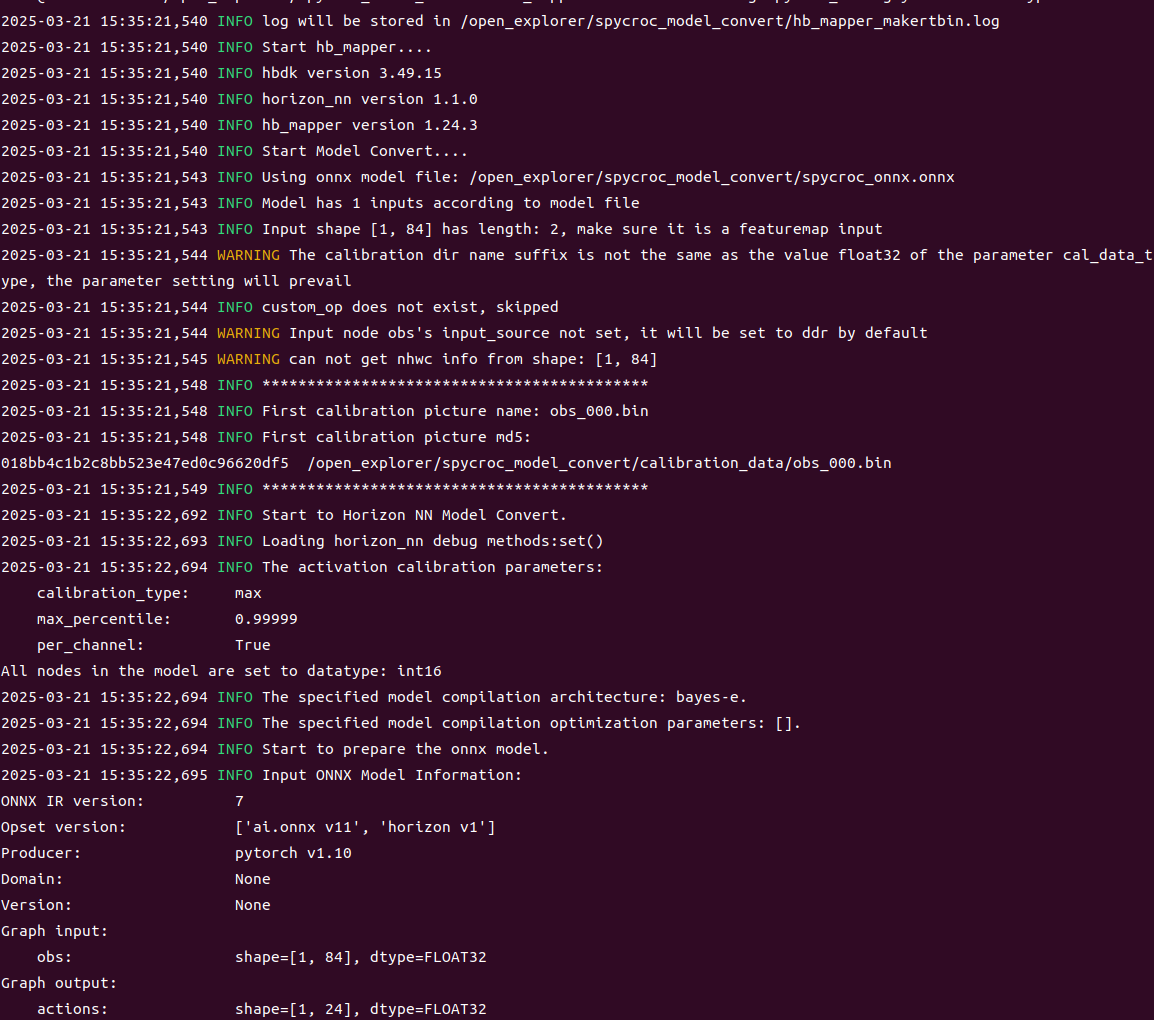
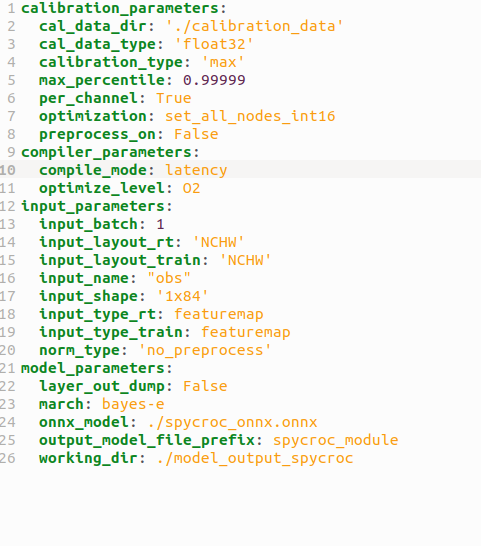
以下是转换过程中的yaml文件
使用校准数据的时候,我play了一遍项目,随机选取了一个环境提取他的观测空间并用numpy保存为bin格式。以下是代码,我生怕校准数据不准,提取了5000份数据
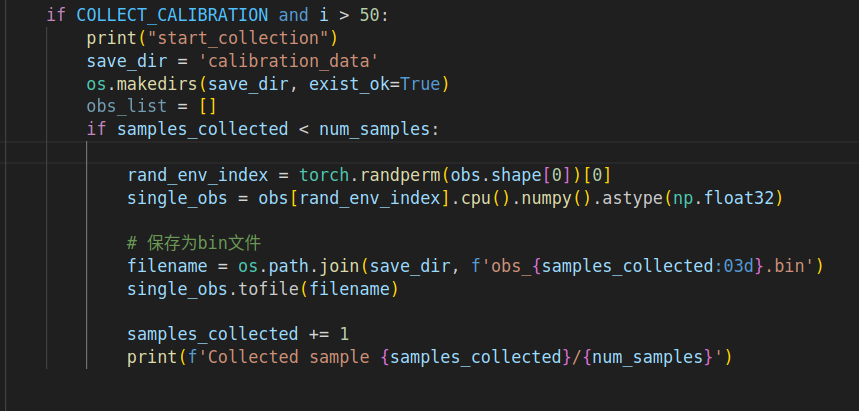
实际上我发现提取100份和提取5000份的效果都是差不多的。
部署在开发板上之后,机器人可以根据commands指令具有向前向后动的趋势,但是始终动不起来,关节运动的幅度非常小。
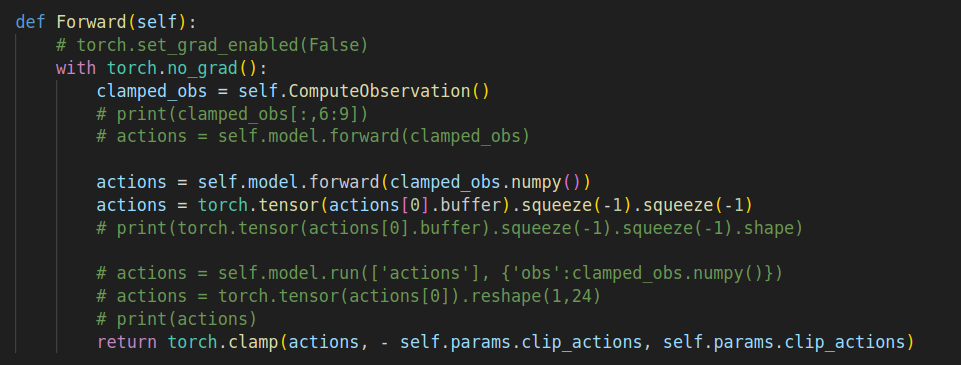
这里是sim2real中调用dnn进行前向推导部分的代码,我尝试使用pt格式和onnx格式,效果都还不错,但是太卡顿了,还是希望可以使用支持BPU的bin格式模型。这里bin模型输出的shape是[1,24,1,1]所以我把后两维去掉了。

我是刚刚购买RDK X5的新手,对于这个板子还不熟悉,但是对于ROS2的支持非常好,我的项目可以很快的部署,这一点体验还是不错的。
但是关于这个模型转换效果差异比较大。希望可以得到帮助。