230AI使用方式如手册提供 双目深度算法 | RDK DOC
你这边是需要进行什么开发,使用什么接口获取的图片为全灰呢
我们只进行图像采集,现在只出现了灰色,无RGB
我来帮你搜索一下社区中关于 230AI 相机灰色画面的相关问题和解决方案。
根据你描述的问题(230AI MIPI 双目相机显示灰色画面,无RGB彩色),结合社区已有案例,这是典型的相机节点未正常输出图像数据的问题。
 问题诊断
问题诊断
灰色画面 = 无数据流,可能原因:
- 相机节点未正确启动
- 图像话题没有发布数据
- 启动参数不匹配
- 硬件连接或系统版本问题
 排查步骤
排查步骤
步骤 1:检查系统版本
cat /etc/horizon_version
要求:建议使用 3.1.1 或更高版本(参考 文档)
步骤 2:使用官方推荐方式启动相机
不要使用自定义脚本,直接用官方 launch 文件:
# 加载环境
source /opt/tros/humble/setup.bash
# 启动 MIPI 双目相机(关键:添加 mipi_lpwm_enable 参数)
ros2 launch mipi_cam mipi_cam_dual_channel.launch.py mipi_lpwm_enable:=True
步骤 3:验证图像数据
在新终端执行:
# 查看相机话题
ros2 topic list | grep -E "image|camera"
# 检查左目图像话题频率(关键!)
ros2 topic hz /stereo0/left/image_raw
# 检查右目图像话题频率
ros2 topic hz /stereo0/right/image_raw
预期结果:应该显示 30.0 Hz 左右。如果显示 0.0 Hz 或 No messages received,说明相机没有正常发布数据。
步骤 4:在 rviz2 中正确订阅
rviz2
在 rviz2 中:
- 点击 “Add” → 选择 “Image”
- Topic 选择:
/stereo0/left/image_raw或/stereo0/right/image_raw - 检查 Fixed Frame 是否设置为
camera_link或base_link
步骤 5:检查硬件连接
# 查看相机设备
ls -l /dev/video*
# 查看系统日志
dmesg | grep -i camera
dmesg | grep -i mipi
 快速验证流程
快速验证流程
# 1. 终止所有 ros2 节点
killall -9 ros2
# 2. 重新加载环境
source /opt/tros/humble/setup.bash
# 3. 启动相机(带 lpwm 参数)
ros2 launch mipi_cam mipi_cam_dual_channel.launch.py mipi_lpwm_enable:=True
# 4. 在新终端检查话题频率
ros2 topic hz /stereo0/left/image_raw
 请补充以下信息
请补充以下信息
如果上述步骤后仍是灰色画面,请提供:
# 1. 系统版本
cat /etc/horizon_version
# 2. 相机话题列表
ros2 topic list | grep -E "camera|image"
# 3. 话题频率
ros2 topic hz /stereo0/left/image_raw
# 4. dmesg 日志
dmesg | tail -50
关键提示:根据社区案例 #34777,MIPI 相机启动时添加 mipi_lpwm_enable:=True 参数可以解决部分图像抓取失败问题。建议优先尝试这个参数。
把排查结果补充到帖子中,这样能更快定位问题!
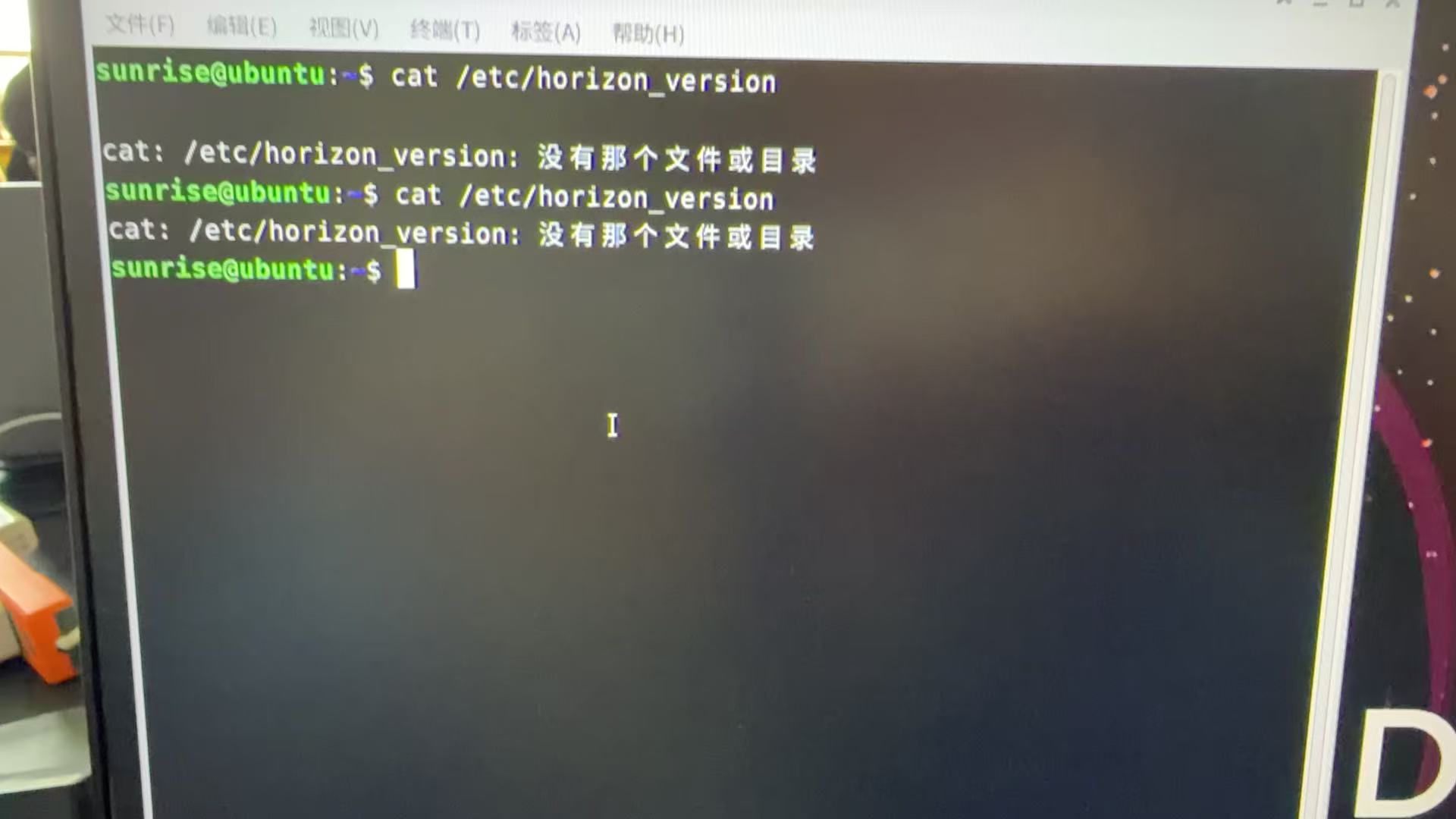
从你的截图看到,/etc/horizon_version 文件不存在,这是命令用错了。
正确的系统版本查看命令
# 方法 1(推荐)
cat /etc/version
# 方法 2
cat /etc/os-release
问题分析
根据你的截图,系统版本文件不存在,可能原因:
- 系统镜像过旧(早期版本没有这个文件)
- 系统烧录不完整
- 使用了非官方镜像
解决方案
步骤 1:先确认当前系统版本
cat /etc/version
步骤 2:根据版本决定是否升级
根据社区最新信息:
- 最新版本:RDK OS 3.4.1(2025-12-9 发布)
- 建议最低版本:3.1.1 或更高
如果你的版本低于 3.1.1,强烈建议升级系统。
步骤 3:升级系统镜像
# 方式 A:在线升级(推荐)
sudo srpi-config
# 方式 B:重新烧录最新镜像
# 下载链接:https://developer.d-robotics.cc/rdk_doc/Release_Note/release_note
# 使用 Xburn 工具烧录 3.4.1 镜像
步骤 4:升级后重新测试相机
# 1. 加载环境
source /opt/tros/humble/setup.bash
# 2. 启动 MIPI 双目相机(带 lpwm 参数)
ros2 launch mipi_cam mipi_cam_dual_channel.launch.py mipi_lpwm_enable:=True
# 3. 检查图像话题
ros2 topic hz /stereo0/left/image_raw
请补充以下信息
执行完上述步骤后,请提供:
# 1. 系统版本(关键!)
cat /etc/version
# 2. TROS 版本
dpkg -l | grep hobot
# 3. 相机话题频率
ros2 topic hz /stereo0/left/image_raw
关键提示:根据社区案例 #31126、#31157,系统版本过旧是导致 MIPI 相机无法工作的常见原因。建议优先升级到 3.4.1 版本。
把系统版本信息补充到帖子中,这样能更快定位问题!
从你的截图看到,/etc/horizon_version 文件不存在,这是命令用错了。
正确的系统版本查看命令
# 方法 1(推荐)
cat /etc/version
# 方法 2
cat /etc/os-release
问题分析
根据你的截图,系统版本文件不存在,可能原因:
- 系统镜像过旧(早期版本没有这个文件)
- 系统烧录不完整
- 使用了非官方镜像
解决方案
步骤 1:先确认当前系统版本
cat /etc/version
步骤 2:根据版本决定是否升级
根据社区最新信息:
| 版本 | 状态 | 建议 |
|---|---|---|
| 3.4.1 | 最新(2025-12-9) | |
| 3.1.1~3.3.x | 稳定 | ️ 可用,但建议升级 |
| 3.0.x 及以下 | 过旧 |
如果你的版本低于 3.1.1,强烈建议升级系统。
步骤 3:升级系统镜像
# 方式 A:在线升级(推荐)
sudo srpi-config
# 方式 B:重新烧录最新镜像
# 下载链接:https://developer.d-robotics.cc/rdk_doc/Release_Note/release_note
# 使用 Xburn 工具烧录 3.4.1 镜像
步骤 4:升级后重新测试相机
# 1. 加载环境
source /opt/tros/humble/setup.bash
# 2. 启动 MIPI 双目相机(带 lpwm 参数)
ros2 launch mipi_cam mipi_cam_dual_channel.launch.py mipi_lpwm_enable:=True
# 3. 检查图像话题
ros2 topic hz /stereo0/left/image_raw
请补充以下信息
执行完上述步骤后,请提供:
# 1. 系统版本(关键!)
cat /etc/version
# 2. TROS 版本
dpkg -l | grep hobot
# 3. 相机话题频率
ros2 topic hz /stereo0/left/image_raw
关键提示:根据社区案例 #31126、#31157,系统版本过旧是导致 MIPI 相机无法工作的常见原因。建议优先升级到 3.4.1 版本。
把系统版本信息补充到帖子中,这样能更快定位问题!
3.4.1版本,是最新的
既然系统已经是 3.4.1 最新版本,那系统版本不是问题根源。灰色画面说明相机节点没有正常输出图像数据。
下一步排查重点
步骤 1:确认相机节点是否启动成功
# 加载环境
source /opt/tros/humble/setup.bash
# 查看正在运行的 ROS2 节点
ros2 node list
# 应该能看到 mipi_cam 或类似名称的节点
步骤 2:检查图像话题是否有数据
# 查看所有图像相关话题
ros2 topic list | grep -E "image|camera"
# 检查左目话题频率(关键!)
ros2 topic hz /stereo0/left/image_raw
# 检查右目话题频率
ros2 topic hz /stereo0/right/image_raw
预期:应该显示 30.0 Hz 左右。如果显示 0.0 Hz 或 No messages received,说明相机没有发布数据。
步骤 3:检查系统日志
# 查看相机相关日志
dmesg | grep -i mipi
dmesg | grep -i camera
# 查看最近 50 行日志
dmesg | tail -50
步骤 4:检查硬件连接
# 查看视频设备
ls -l /dev/video*
# 确认 MIPI 相机是否被识别
ls -l /dev/i2c*
快速验证流程
# 1. 终止所有 ros2 节点
killall -9 ros2
sleep 2
# 2. 重新加载环境
source /opt/tros/humble/setup.bash
# 3. 启动 MIPI 双目相机(标准方式)
ros2 launch mipi_cam mipi_cam_dual_channel.launch.py mipi_lpwm_enable:=True
# 4. 在新终端检查话题频率(等待 5 秒后执行)
sleep 5
ros2 topic hz /stereo0/left/image_raw
请补充以下信息
执行上述命令后,请提供:
# 1. 系统版本确认
cat /etc/version
# 2. 正在运行的节点
ros2 node list
# 3. 图像话题列表
ros2 topic list | grep image
# 4. 左目话题频率
ros2 topic hz /stereo0/left/image_raw
# 5. dmesg 日志(相机相关)
dmesg | grep -i mipi | tail -20
关键提示:既然系统已是最新版,问题可能在于:
- 相机硬件连接松动
- MIPI 接口配置问题
- 相机节点启动参数不匹配
把上述排查结果补充到帖子中,这样能更快定位问题!
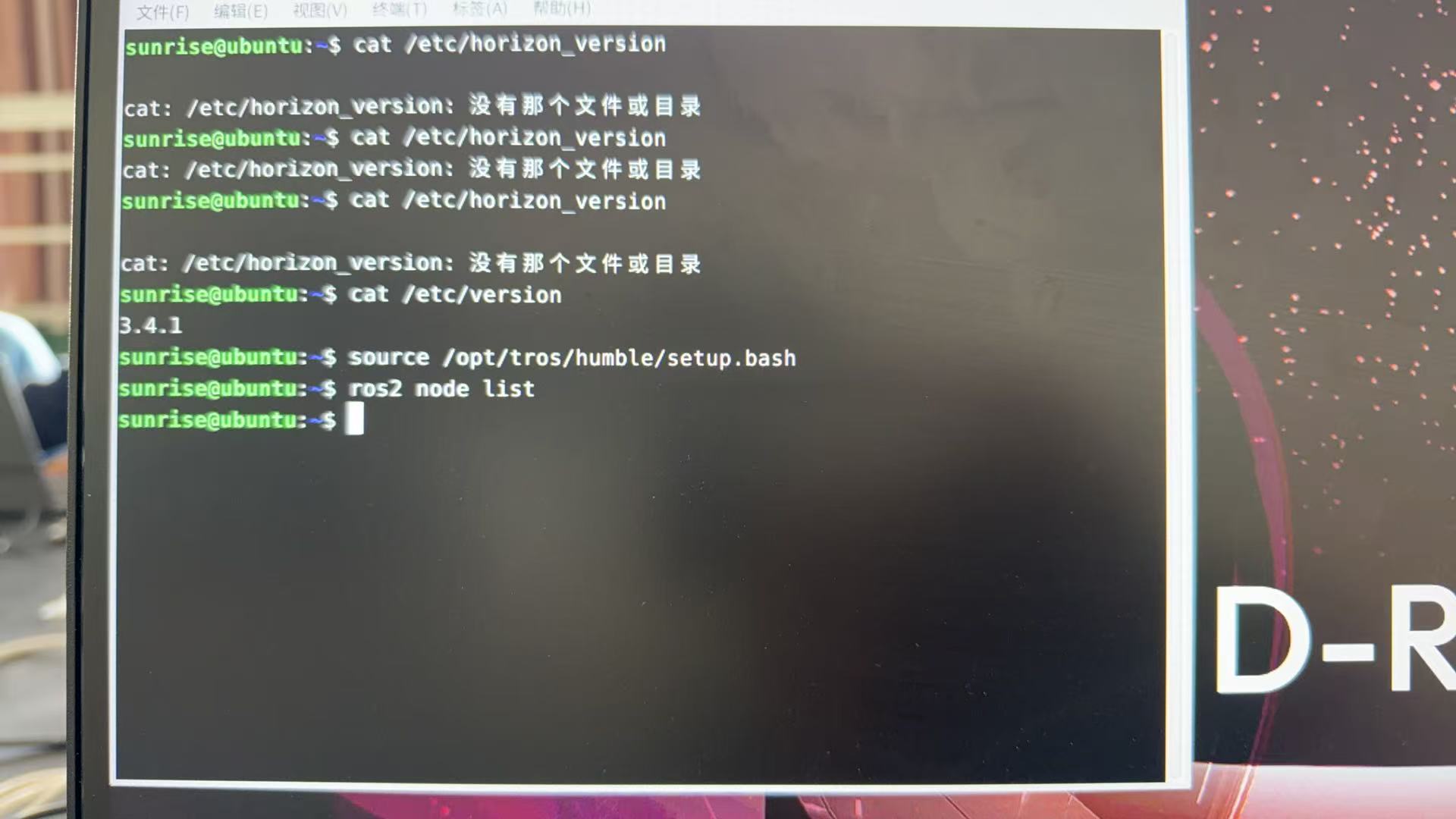
好的,系统版本 3.4.1 已确认是最新的,这排除了版本兼容性问题。
现在灰色画面的问题聚焦在相机节点未正常输出数据。请按以下步骤排查:
关键排查步骤
步骤 1:确认相机节点是否启动
# 加载环境
source /opt/tros/humble/setup.bash
# 查看正在运行的 ROS2 节点
ros2 node list
预期:应该能看到 mipi_cam 或类似名称的节点。
步骤 2:检查图像话题是否有数据(最关键!)
# 查看所有图像相关话题
ros2 topic list | grep -E "image|camera"
# 检查左目话题频率
ros2 topic hz /stereo0/left/image_raw
# 检查右目话题频率
ros2 topic hz /stereo0/right/image_raw
判断标准:
- 正常:显示
30.0 Hz左右  异常:显示
异常:显示 0.0 Hz或No messages received→ 相机节点未发布数据
步骤 3:使用官方标准启动命令
# 1. 终止所有 ros2 节点
killall -9 ros2
sleep 2
# 2. 重新加载环境
source /opt/tros/humble/setup.bash
# 3. 启动 MIPI 双目相机(带 lpwm 参数)
ros2 launch mipi_cam mipi_cam_dual_channel.launch.py mipi_lpwm_enable:=True
等待 5 秒后,在新终端执行:
ros2 topic hz /stereo0/left/image_raw
步骤 4:检查硬件连接和系统日志
# 查看视频设备
ls -l /dev/video*
# 查看 MIPI 相机相关日志
dmesg | grep -i mipi | tail -20
# 查看相机相关日志
dmesg | grep -i camera | tail -20
请补充以下排查结果
执行上述命令后,请提供:
# 1. 系统版本确认
cat /etc/version
# 2. 正在运行的节点列表
ros2 node list
# 3. 图像话题列表
ros2 topic list | grep image
# 4. 左目话题频率(启动相机后)
ros2 topic hz /stereo0/left/image_raw
# 5. MIPI 相关日志
dmesg | grep -i mipi | tail -20
 常见原因参考
常见原因参考
根据社区案例,灰色画面常见原因:
- 相机节点未启动 → 话题频率为 0 Hz
- rviz2 订阅了错误的话题 → 应订阅
/stereo0/left/image_raw - MIPI 接口松动 → dmesg 中有硬件错误日志
- 相机供电不足 → 检查电源连接
把上述排查结果补充到帖子中,这样能更快定位问题!
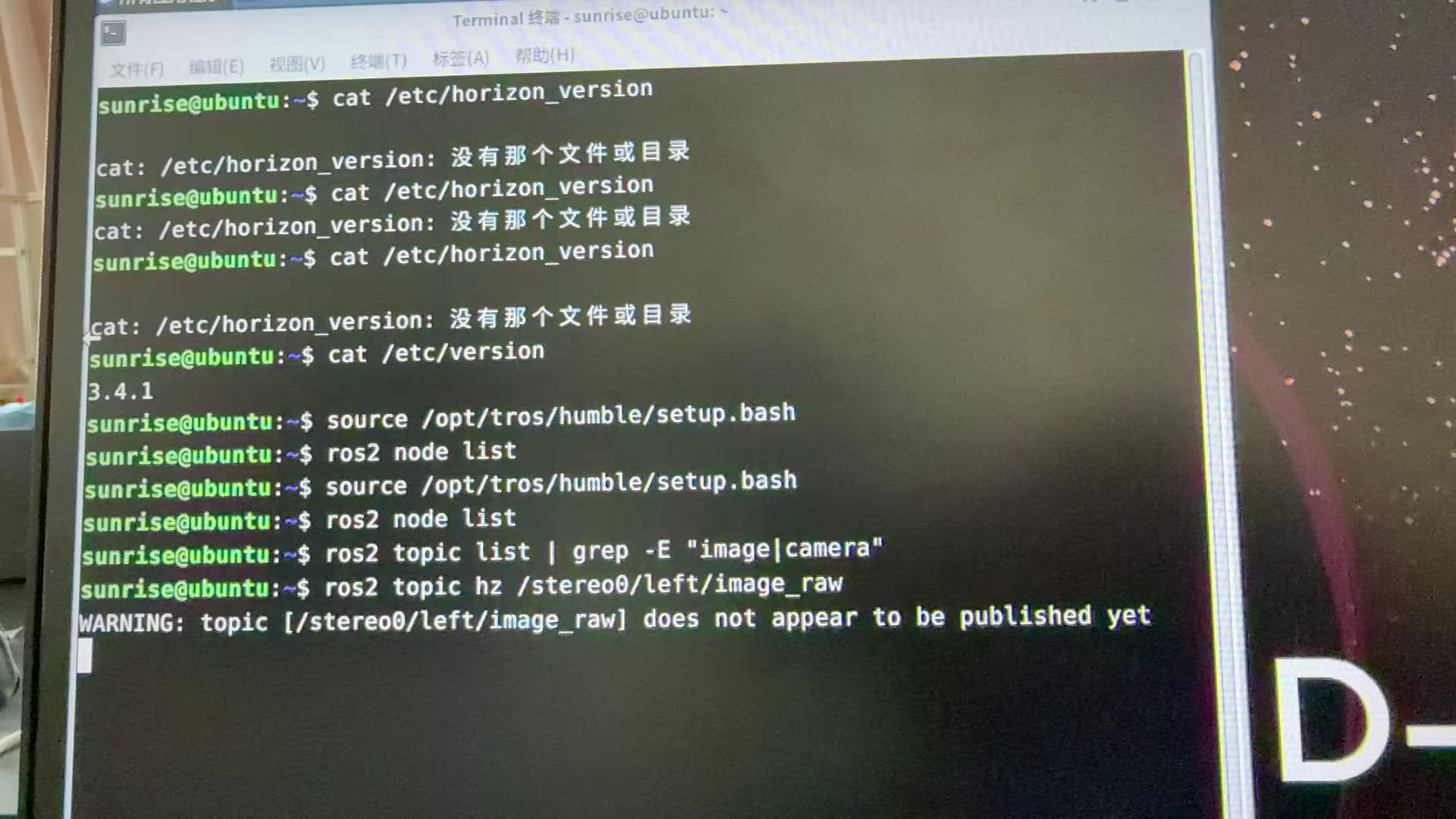
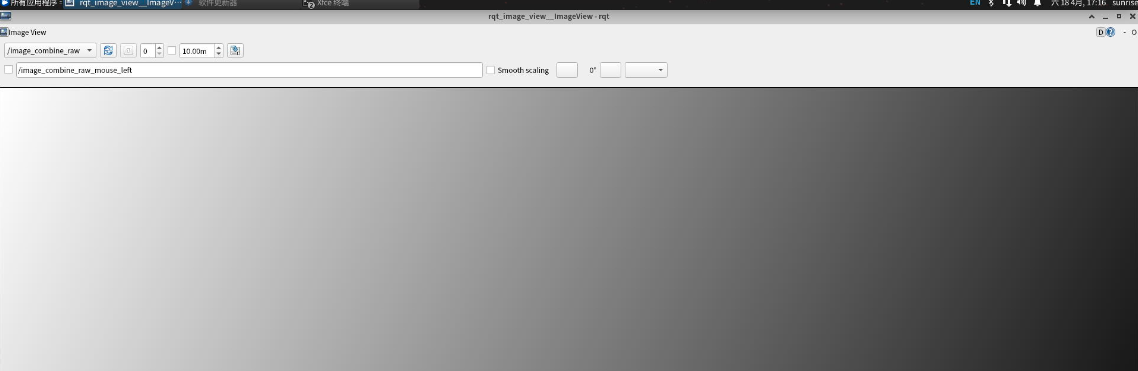
问题定位:话题存在但无数据发布
从你的截图看到关键信息:
- 话题
/stereo0/left/image_raw存在 - 但显示
does not appear to be published yet→ 相机节点没有发布图像数据
这是典型的相机驱动层问题,不是 ROS2 配置问题。
深入排查步骤
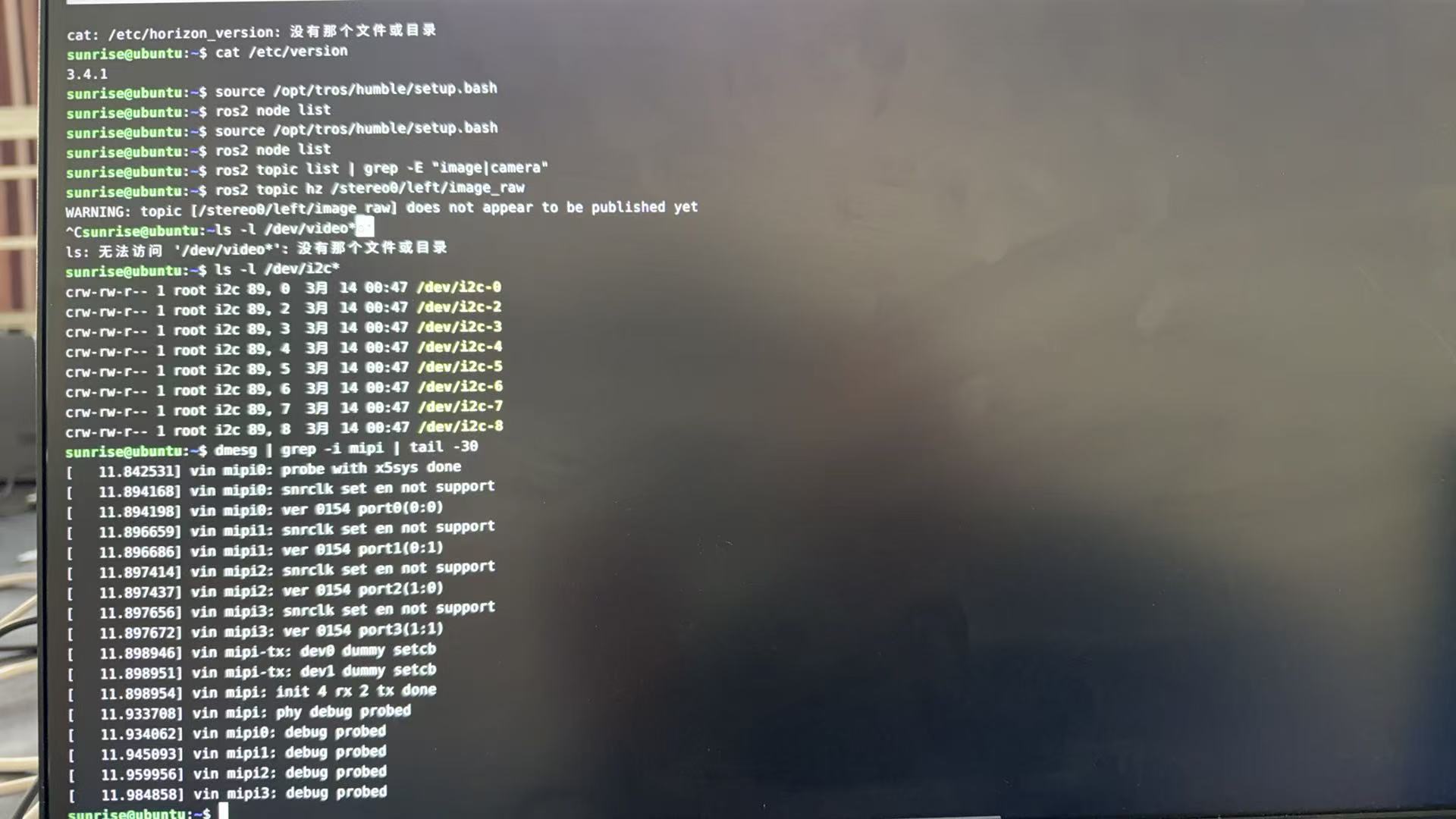
步骤 1:检查 MIPI 相机硬件是否被识别
# 查看 MIPI 相机设备
ls -l /dev/video*
# 查看 I2C 总线(MIPI 相机通过 I2C 通信)
ls -l /dev/i2c*
# 查看 dmesg 中 MIPI 相关日志(关键!)
dmesg | grep -i mipi | tail -30
预期:应该能看到 MIPI 相机初始化成功的日志。如果有 error 或 failed 字样,说明硬件连接有问题。
步骤 2:检查相机节点启动日志
重新启动相机节点,完整查看输出日志:
# 终止所有 ros2 节点
killall -9 ros2
sleep 2
# 重新加载环境
source /opt/tros/humble/setup.bash
# 启动相机(完整日志输出)
ros2 launch mipi_cam mipi_cam_dual_channel.launch.py mipi_lpwm_enable:=True
重点观察:
- 是否有
Camera initialized或类似成功信息 - 是否有
error、failed、timeout等错误信息 - 是否有
No camera detected提示
步骤 3:检查相机标定参数文件
# 查看标定参数是否存在
ls -l /opt/tros/humble/lib/mipi_cam/config/
# 查看标定文件内容
cat /opt/tros/humble/lib/mipi_cam/config/calib_params.yaml
如果文件不存在或为空,相机节点可能无法正常工作。
步骤 4:尝试不同的启动参数
根据社区案例,尝试以下参数组合:
# 方式 A:启用 lpwm(已尝试)
ros2 launch mipi_cam mipi_cam_dual_channel.launch.py mipi_lpwm_enable:=True
# 方式 B:添加相机 ID 参数
ros2 launch mipi_cam mipi_cam_dual_channel.launch.py mipi_lpwm_enable:=True camera_id:=0
# 方式 C:尝试单目模式(先测试单个相机)
ros2 launch mipi_cam mipi_cam_single_channel.launch.py mipi_lpwm_enable:=True
步骤 5:检查硬件连接(关键!)
# 1. 断电后重新插拔 MIPI 相机排线
# 2. 确认排线方向正确(金属面朝内)
# 3. 确认排线完全插入到位
# 4. 重新上电后检查
dmesg | tail -50
请补充以下关键信息
# 1. MIPI 相关日志(最重要!)
dmesg | grep -i mipi | tail -30
# 2. 视频设备列表
ls -l /dev/video*
# 3. 相机节点启动日志(完整输出)
# 启动相机节点后复制终端输出
# 4. 标定参数文件
cat /opt/tros/humble/lib/mipi_cam/config/calib_params.yaml
可能原因排序
根据社区案例 #34777,灰色无数据常见原因:
| 原因 | 概率 | 排查方法 |
|---|---|---|
| MIPI 排线松动 | 60% | 重新插拔,检查 dmesg |
| 标定参数缺失 | 20% | 检查 calib_params.yaml |
| 相机供电不足 | 10% | 检查电源连接 |
| 驱动版本不匹配 | 10% | 升级系统到 3.4.1(已完成) |
建议优先操作:
- 断电后重新插拔 MIPI 相机排线(最常见原因)
- 执行
dmesg | grep -i mipi | tail -30查看硬件日志 - 把日志输出补充到帖子中
这样能快速定位是硬件问题还是软件配置问题!
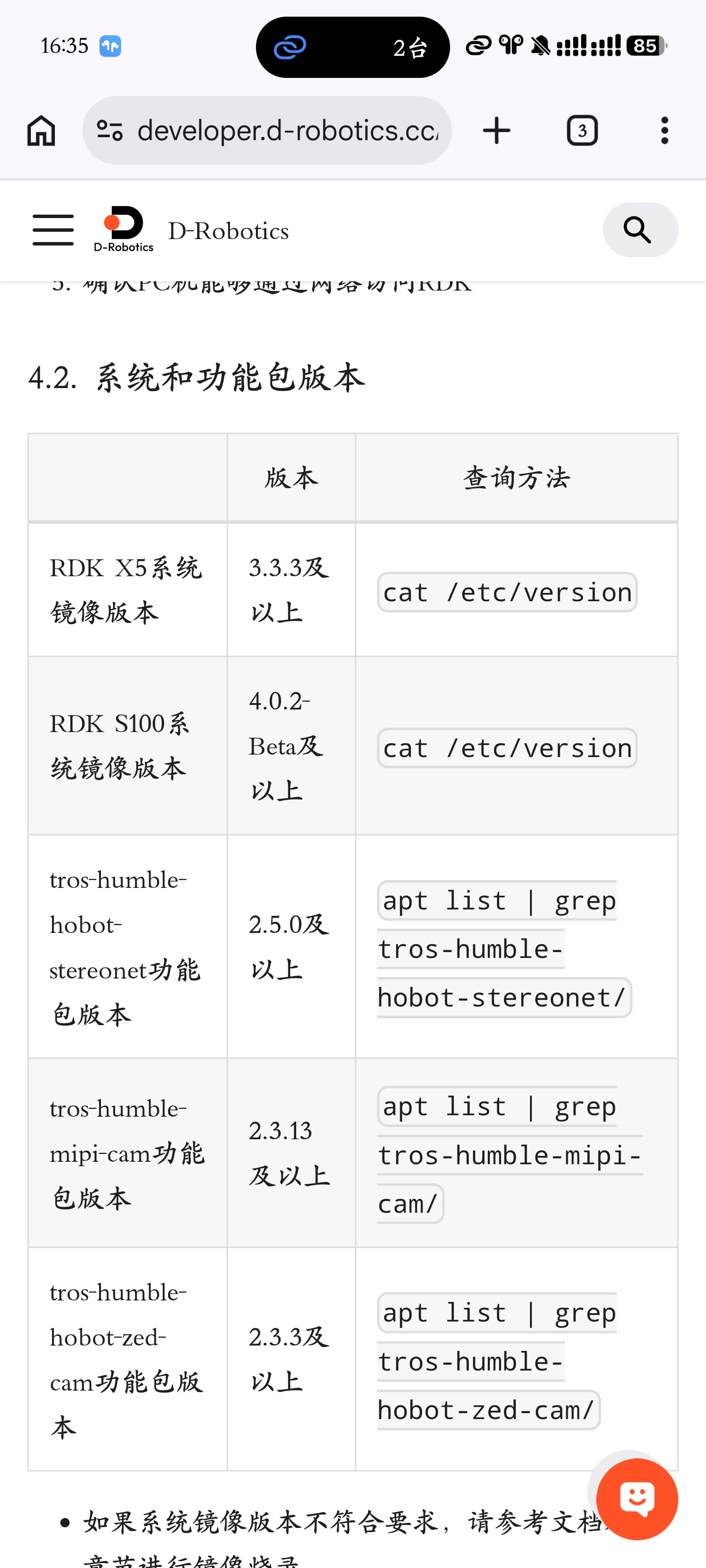
参考使用手册,还需要确定软件包版本是否满足需求
前置有章节为230图像采集
这里有图像采集的手册内容
问题进展分析
从最新截图看到:
- 相机节点已启动(能看到大量 ROS2 节点和话题)
- 但
/stereo0/left/image_raw仍显示does not appear to be published yet→ 无数据发布
Marcelo6151 管理员提示需要确认软件包版本,这是关键排查方向。
立即执行的排查步骤
步骤 1:检查 hobot 相关软件包版本
# 查看 mipi_cam 相关包版本
dpkg -l | grep mipi
# 查看 hobot 相关包版本
dpkg -l | grep hobot
# 查看 tros 版本
dpkg -l | grep tros
关键包:
hobot-mipi-cam或ros-humble-mipi-camhobot-sensor或相关驱动包
步骤 2:查看 230AI 图像采集手册
根据管理员提示,参考官方文档:
- 文档链接:双目深度算法 | RDK DOC
- 重点查看:前置章节「230 图像采集」的软件包版本要求
步骤 3:检查 MIPI 相机驱动日志(最关键!)
# 查看 MIPI 相机初始化日志
dmesg | grep -i mipi | tail -50
# 查看 sensor 相关日志
dmesg | grep -i sensor | tail -30
# 查看最近系统日志
dmesg | tail -100
重点找:
-
camera probe success或initialized -
probe failed、timeout、error
步骤 4:尝试手动测试相机
# 使用 v4l2 测试相机是否能输出数据
v4l2-ctl --list-devices
# 尝试用 v4l2 抓取一帧
v4l2-ctl -d /dev/video0 --stream-mmap --stream-count=1 --stream-to=test.raw
步骤 5:检查相机标定文件
# 查看标定参数目录
ls -la /opt/tros/humble/lib/mipi_cam/config/
# 查看标定文件
cat /opt/tros/humble/lib/mipi_cam/config/calib_params.yaml
# 如果文件为空或不存在,需要重新生成标定
请补充以下信息
# 1. 软件包版本
dpkg -l | grep -E "mipi|hobot|tros"
# 2. MIPI 驱动日志
dmesg | grep -i mipi | tail -50
# 3. 视频设备
v4l2-ctl --list-devices
# 4. 标定文件内容
cat /opt/tros/humble/lib/mipi_cam/config/calib_params.yaml
可能原因(按概率排序)
| 原因 | 排查方法 |
|---|---|
| 软件包版本不匹配 | 执行步骤 1,对比文档要求 |
| MIPI 排线接触不良 | 查看 dmesg 中 probe failed 日志 |
| 标定参数缺失 | 检查 calib_params.yaml |
| 相机供电不足 | 检查电源连接,dmesg 中是否有供电错误 |
建议优先操作:
- 执行
dpkg -l | grep mipi确认软件包版本 - 执行
dmesg | grep -i mipi | tail -50查看驱动日志 - 对比官方文档的版本要求
把上述信息补充到帖子中,管理员能更快帮你定位问题!